一种水下机器人专用清洗枪的制作方法
1.本实用新型涉及水下机器人技术领域,具体涉及一种水下机器人专用清洗枪。
背景技术:
2.水下机器人是一种具有智能功能的潜水器,是工作于水下的极限作业设备,能潜入水中代替人完成某些操作,由于水下环境恶劣危险,且人的潜水深度有限,所以水下机器人成为了开发海洋的重要工具。目前,水下机器人在海上救援、石油开发、地貌勘察、科研、水产养殖、水下船体检修清洁、潜水娱乐、城市管道检测等领域的作用开始显现出来,市场也正在兴起。
3.当水下机器人在水下进行清洗作业时,常会在水下机器人上安装清洗刷,在使用时会存在以下问题:清洗刷只能用在大面积平整的表面上,对不规则的表面却无能为力;其次,清洗刷还会伤害被清洗物表面的油漆,尤其是对船体表面清洗时,清洗刷会磨下大量的防污油漆,油漆中的重金属离子等有害物质还会对水环境造成危害;另外,在清洗过程中,还需要不断的停下来清理和更换清洗刷,还是存在工作效率低,使用不便的问题。因此,研制开发一种使用方便,不会对清洗面造成损伤,清洗效率高的水下机器人专用清洗枪是客观需要的。
技术实现要素:
4.本实用新型的目的在于提供一种使用方便,不会对清洗面造成损伤,清洗效率高的水下机器人专用清洗枪。
5.本实用新型的目的是这样实现的,包括水下机器人本体和安装在水下机器人本体内腔中的摆动旋转轴,摆动旋转轴的下端传动连接有能够驱动摆动旋转轴来回转动的驱动机构,上端伸出水下机器人本体的顶部后连接有摆动臂,摆动臂的端部连接有空心的枪杆,枪杆的下端连接有空心的清洗枪排,枪杆和清洗枪排的空腔连通,清洗枪排的底部设置有多个清洗喷射口。
6.进一步的,清洗枪排的顶部设置有反推喷射口,反推喷射口的喷射方向与清洗喷射口的喷射方向相反。
7.进一步的,驱动机构包括安装板和舵机,安装板固定在水下机器人本体的内腔中,摆动旋转轴的下端与安装板的上表面转动连接,舵机安装在安装板的下方,舵机的输出轴穿过安装板后固定连接有曲柄,曲柄的端部转动连接有连杆,连杆的端部转动连接有摆杆,摆杆的端部与摆动旋转轴固定连接。
8.进一步的,清洗喷射口的数量为3~8个。
9.进一步的,摆动臂的长度不小于水下机器人本体宽度的一半。
10.进一步的,摆动臂为长度可调的伸缩结构。
11.本实用新型安装在水下机器人本体上,用于水下船体表面等水下污面的清洗,运行时,连接好水下机器人的电缆,并在枪杆的上端连接高压供水软管,高压供水软管的上端
接入高压泵,然后将水下机器人本体投入水中,控制水下机器人本体到达待清理工作面,通过驱动机构带动摆动旋转轴进行来回转动,进而带动摆动臂来回摆动,枪杆、清洗枪排和清洗喷射口随之来回摆动,同时启动高压泵,在高压泵的作用下,清洗水依次通过供水软管和枪杆后进入清洗枪排,最后从各个清洗喷射口喷出,对待清洗面进行清洗作业。在上述过程中,清洗喷射口始终在不断的进行左右摆动,可在清洗表面形成扇形,随着水下机器人本体向前推进,清洗面更大,清洗效率更高;相对于传统的清洗刷结构来说,喷出一定压力的水流,不易伤及待清洗表面的油漆和清洗面本身,且对于不平整的待清洗表面也可进行清洗,使用较为方便。本实用新型使用方便,不会对清洗面造成损伤,清洗效率高,具有显著的经济价值和社会价值。
附图说明
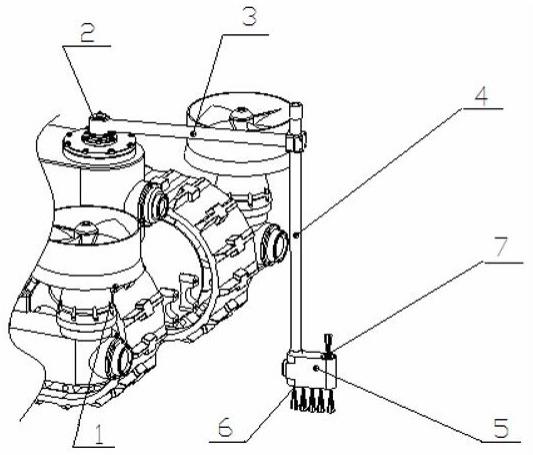
12.图1为本实用新型的整体结构示意图;
13.图2为本实用新型中驱动机构的结构示意图;
14.图中:1-水下机器人本体,2-摆动旋转轴,3-摆动臂,4-枪杆,5-清洗枪排,6-清洗喷射口,7-反推喷射口,8-安装板,9-舵机,10-曲柄,11-连杆,12-摆杆。
具体实施方式
15.下面结合附图对本实用新型作进一步的说明,但不以任何方式对本实用新型加以限制,基于本实用新型所作的任何变更或改进,均属于本实用新型的保护范围。
16.如图1~2所示,本实用新型包括水下机器人本体1和安装在水下机器人本体1内腔中的摆动旋转轴2,摆动旋转轴2的下端传动连接有能够驱动摆动旋转轴2来回转动的驱动机构,上端伸出水下机器人本体1的顶部后连接有摆动臂3,为了便于摆动旋转轴2的装卸,可在摆动旋转轴2上安装法兰盘,在通过螺栓将法兰盘固定在水下机器人本体1上,摆动臂3的端部连接有空心的枪杆4,枪杆4的下端连接有空心的清洗枪排5,枪杆4和清洗枪排5的空腔连通,清洗枪排5的底部设置有多个清洗喷射口6,本实用新型中,摆动旋转轴2和驱动机构均集成安装在水下机器人本体1的内部,多个清洗喷射口6均集成安装在一个清洗枪排5上,结构更为紧凑,整体尺寸和体积更小,便于水下作业的进行。
17.本实用新型安装在水下机器人本体1上,用于水下船体表面等水下污面的清洗,运行时,连接好水下机器人本体1的电缆,并在枪杆4的上端连接高压供水软管,高压供水软管的上端接入高压泵,然后将水下机器人本体1投入水中,控制水下机器人本体1到达待清理工作面,通过驱动机构带动摆动旋转轴2进行来回转动,进而带动摆动臂3来回摆动,枪杆4、清洗枪排5和清洗喷射口6随之来回摆动,同时启动高压泵,在高压泵的作用下,清洗水依次通过供水软管和枪杆4后进入清洗枪排5,最后从各个清洗喷射口6喷出,对待清洗面进行清洗作业。在上述过程中,清洗喷射口6始终在不断的进行左右摆动,可在清洗表面形成扇形清洗面,随着水下机器人本体1向前推进,清洗面更大,清洗效率更高;相对于传统的清洗刷结构来说,喷出一定压力的水流,不易伤及待清洗表面的油漆和待清洗面本身,且对于一些凹凸不平的待清洗表面也可进行清洗,适用性更好,使用更为方便。
18.清洗枪排5的顶部设置有反推喷射口7,反推喷射口7的喷射方向与清洗喷射口6的喷射方向相反,本实用新型运行时,高压水流从清洗喷射口6向下喷出,根据力学原理可知,
高压水流喷出时会对清洗枪排5施加一个反作用力,即后坐力,当这个反作用力太大时,可能导致水下机器人本体1上翘或失稳,为了防止这种情况的发生而设置反推喷射口7,高压水流从反推喷射口7喷出,用于平衡清洗喷射口6产生的反作用力,进而提高清洗机器人本体1整体的稳定性和可靠性,确保清洗作业的正常进行。
19.驱动机构包括安装板8和舵机9,安装板8固定在水下机器人本体1的内腔中,摆动旋转轴2的下端与安装板8的上表面转动连接,舵机9安装在安装板8的下方,舵机9的输出轴穿过安装板8后固定连接有曲柄10,曲柄10的端部转动连接有连杆11,连杆11的端部转动连接有摆杆12,摆杆12的端部与摆动旋转轴2固定连接。舵机9启动后,带动曲柄10一同转动,曲柄10转动时通过连杆11带动摆杆12来回摆动,摆杆12来回摆动时带动摆动旋转轴2来回转动,进而带动本实用新型中的其余部件进行来回摆动,完成水下清洗面的清洗作业。
20.清洗喷射口6的数量为3~8个,清洗喷射口6的数量可根据实际需要确定,在使用时,各个清洗喷射口6的大小,相互之间的间距以及水压的大小均可根据实际情况确定。
21.摆动臂3的长度不小于水下机器人本体1宽度的一半,摆动臂3在运行时沿着摆动旋转轴2转动,以摆动旋转轴2为圆心,而通常情况下摆动旋转轴2安装在水下机器人本体宽度方向的中部,若是摆动臂3的长度小于水下机器人本体1宽度的一半,那么清理扇面就不能完全覆盖水下机器人本体1行进路线上的工作表面,就会降低清理效率;反之,摆动臂3的长度不小于水下机器人本体1宽度的一半,那么清理扇面就能够完全覆盖水下机器人本体1行进路线上的工作表面,的大幅提高本实用新型的清理效率。
22.摆动臂3为长度可调的伸缩结构,将摆动臂3设置为长度可调的伸缩结构,在本实用新型使用时,可根据水下清洗面的具体情况,适当伸缩摆动臂3的长度,便于清洗面的清洗作业为宜。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1