一种实验室环境下化工废品的清理装置
1.本实用新型涉及实验室环境清洁装置,具体是涉及一种实验室环境下化工废品的清理装置。
背景技术:
2.实验室按照环境设施建设应与管理相结合的原则,建立了科学的管理目标和管理制度,对各种环境设施均有规范使用、安全检查和防护维修制度。保证实验室的整洁干净对实验室安全以及实验结果均存在影响。
3.实验室平时的废品的收集清理十分耗费人力,而且存在清理不及时,或者清理遗漏,对实验室环境造成影响,化工试剂遗留在地上时间长了难以处理,产生斑点,影响实验室环境。
技术实现要素:
4.实用新型目的:针对以上缺点,本实用新型提供一种全自动对实验室环境下化工废品的清理装置。
5.技术方案:为解决上述问题,本实用新型采用一种实验室环境下化工废品的清理装置,包括车体、驱动车体运动的车体驱动装置、拾取装置和清洁装置,所述拾取装置设置于车体前端,拾取装置包括用于拾取固体化工废品或化工废品包装的机械手,所述清洁装置包括清洁头、控制装置和替换箱,所述清洁头包括拖布、磁性金属,拖布与磁性金属固定连接,所述控制装置包括清洁机械臂、电磁控制器,所述清洁机械臂一端设置于车体上,另一端固定连接电磁控制器,电磁控制器得电时,产生磁性吸附磁性金属,替换箱用于放置使用后及未使用的清洁头。
6.进一步的,所述清洁机械臂包括设置于车体上的清洁机械臂底座、第一清洁动臂、第二清洁动臂、第一清洁伸缩杆、第二清洁伸缩杆、第三清洁伸缩杆,所述第一清洁动臂一端与清洁机械臂底座铰接,第一清洁动臂另一端与第二清洁动臂一端铰接,第二清洁动臂另一端连接电磁控制器,所述第一清洁伸缩杆一端与清洁机械臂底座铰接,第一清洁伸缩杆另一端与第一清洁动臂铰接,第二清洁伸缩杆一端与第一清洁动臂铰接,第二清洁伸缩杆另一端与第二清洁动臂铰接,第三清洁伸缩杆一端与第二清洁动臂铰接,第三清洁伸缩杆另一端连接电磁控制器。
7.进一步的,所述替换箱包括放置箱和收集箱,所述放置箱用于放置未使用的拖布,所述收集箱用于收集使用后的拖布。
8.进一步的,所述车体上还设置有清水喷头,所述清水喷头用于向液体化工废品上喷射清水。
9.进一步的,所述机械手包括设置于车体上的拾取机械臂底座、第一拾取动臂、第二拾取动臂、第一拾取伸缩杆、第二拾取伸缩杆、第三拾取伸缩杆、机械爪,所述第一拾取动臂一端与拾取机械臂底座铰接,第一拾取动臂另一端与第二拾取动臂一端铰接,第二拾取动
臂另一端连接机械爪,所述第一拾取伸缩杆一端与拾取机械臂底座铰接,第一拾取伸缩杆另一端与第一拾取动臂铰接,第二拾取伸缩杆一端与第一拾取动臂铰接,第二拾取伸缩杆另一端与第二拾取动臂铰接,第三拾取伸缩杆一端与第二拾取动臂铰接,第三拾取伸缩杆另一端连接机械爪。
10.进一步的,所述机械爪包括支架、手爪伸缩杆、手爪,所述支架连接于第三拾取伸缩杆端部,手爪伸缩杆一端与支架铰接,手爪伸缩杆另一端与手爪爪身铰接,手爪一端与支架铰接。
11.有益效果:本实用新型相对于现有技术,其显著优点是通过机械手清理固体化工废品,通过清洁装置清洁液体化工废品,实现全自动化工废品清理,有效保持实验室环境,避免实验室产生安全隐患,同时避免人为清理存在的危险性。并且通过磁性装置自动更换拖布,延长装置自动工作时间,减少人为更换拖布次数,节省人力和时间。
附图说明
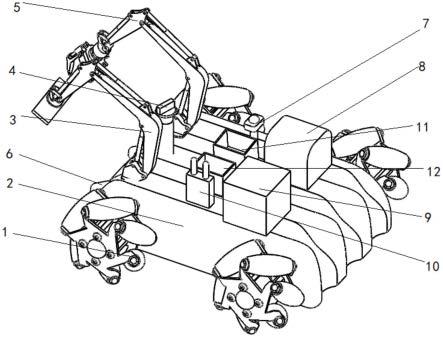
12.图1是本实用新型清理装置的结构示意图;
13.图2是本实用新型清理装置的侧视图;
14.图3是本实用新型清理装置的俯视图;
15.图4是本实用新型中机械手的结构示意图;
16.图5是本实用新型中清洁装置的结构示意图;
17.图6是本实用新型中联轴器连接车体驱动电机和车轮的剖视图。
具体实施方式
18.如图1至图3所示,本实施例中的一种实验室环境下化工废品的清理装置,包括车轮1、车体2、清洁装置3、摄像头4、机械手(拾取装置)5、清水喷头6、气体传感器7、控制与信息传输模块8、温度传感器9、电源10、放置箱11、收集箱12。
19.车轮1采用四轮麦克纳姆轮,麦克纳姆轮是一种可全方位移动的全向轮,由轮毂和围绕轮毂的辊子组成,麦克纳姆轮循迹小车可以进行任意方向运作。如图6所示,车体2内部设置驱动电机201、联轴器202,驱动电机201采用螺丝固定于车体2内部,通过线缆与电源10相连,通电后驱动电机201通过与联轴器202和车轮1连接,当电机开关打开后驱动电机201开始工作,清理装置的速度为0.05米/秒,清理过程中装置能够正常移动。
20.车体2采用全车体为铝合金材料,可以减少使用过程中的磨损,延长装置的使用寿命,轻质耐用,并且增加了装置的稳定性。车体上前端焊接了清洁装置3和机械爪5,胶接了两个清水喷头6,车体上方通过胶接的方式固定控制与信息传输模块8和电源10,并固定了摄像头4、气体传感器7、温度传感器9、放置箱11和收集箱12。
21.清洁装置3包括清洁头、控制装置和替换箱,清洁头包括拖布301、磁性金属302,磁性金属302可以采用铁片等,拖布301与磁性金属302固定连接,铁片可以完全覆盖拖布,也可以连接在拖布上的某个部位。控制装置包括清洁机械臂、电磁控制器303,清洁机械臂一端设置于车体2上,另一端固定连接电磁控制器303,电磁控制器303得电时,产生磁性吸附磁性金属302,从而固定拖布301,电磁控制器303失电时,拖布脱离,实现拖布的更换,拖布用来清洁液体化工废品的遗留污渍,替换箱用于放置使用后及未使用的清洁头。
22.放置箱11通过胶接的方式固定于车体2的上方,用来放置干净的拖布,每块拖布上都粘贴有铁片,铁片朝上依次放置,可以实现更换拖布。收集箱12通过胶接的方式固定于车体2的上方,用来收集擦完后取下的拖布集中处理。为增加放置拖布的数量,放置箱11和收集箱12可以设置为两侧带齿槽的磁性箱体,且磁性弱与电磁控制器303得电时的磁性,清洁机械臂将拖布竖直卡入收集箱12内,失电之后拖布保持竖直状态吸附于收集箱内,未使用的拖布竖直吸附于放置箱的齿槽内。
23.电磁控制器303设置于清洁机械臂端部,其通过线缆与电源10相连、通过线缆与控制与信息传输装置8相连,操作过程中计算机将电磁控制器303工作指令经无线信号传输到控制与信息传输装置8,信息传输与控制装置8再通过线缆控制电磁控制器303通电产生磁性,吸附拖布301上的铁片。
24.如图5所示,清洁机械臂包括设置于车体2上的清洁机械臂底座309、第一清洁动臂307、第二清洁动臂305、第一清洁伸缩杆308、第二清洁伸缩杆306、第三清洁伸缩杆304,第三清洁伸缩杆304输出端与电磁控制器303相连,另一端铰接在第一清洁动臂307的表面,其通过线缆与电源10相连、通过线缆与控制与信息传输装置8相连,操作过程中计算机将清洁装置第三清洁伸缩杆304工作指令经无线信号传输到控制与信息传输装置8,信息传输与控制装置8再通过线缆控制清洁装置第三清洁伸缩杆304的伸缩。
25.第二清洁动臂305上端铰接清洁装置动臂307和第二清洁伸缩杆306,清洁装置动臂307和第二清洁伸缩杆306的运动带动第二清洁动臂305上下运动,从而带动拖布工作清理污渍。
26.第二清洁伸缩杆306输出端与第二清洁动臂305相连,另一端铰接在清洁装置动臂307的表面,通过线缆与电源10相连、通过线缆与控制与信息传输装置8相连,操作过程中计算机将第二清洁伸缩杆306工作指令经无线信号传输到控制与信息传输装置8,信息传输与控制装置8再通过线缆控制第二清洁伸缩杆306的伸缩。
27.清洁装置动臂307上端铰接在第二清洁伸缩杆306,下端铰接在清洁机械臂底座309上,中间连接第一清洁伸缩杆308,通过第一清洁伸缩杆308的收缩,实现清洁装置动臂上下工作。第一清洁伸缩杆308输出端与清洁装置动臂307相连,另一端铰接在清洁机械臂底座309的表面,其通过线缆与电源10相连、通过线缆与控制与信息传输装置8相连,信息传输与控制装置8通过线缆控制第一清洁伸缩杆308的伸缩。
28.摄像头4设置于车体2上,摄像头通过线缆的方式与电源10相连,保证摄像头的正常工作,同时其通过无线信号传输的方式与控制与信息传输模块8相连,操作过程中计算机端将摄像头的工作指令经无线信号传输到控制与信息传输模块8,控制与信息传输模块8再通过无线传输的形式控制摄像头的工作,并将其实时拍摄到的实验室环境影像数据发送到计算机端,便于实时拍摄记录实验室的化工原料的废品情况。
29.如图4所示,机械手5包括机械手包括设置于车体2上的拾取机械臂底座509、第一拾取动臂508、第二拾取动臂505、第一拾取伸缩杆507、第二拾取伸缩杆506、第三拾取伸缩杆504、机械爪,所述第一拾取动臂508一端与拾取机械臂底座509铰接,第一拾取动臂508另一端与第二拾取动臂505一端铰接,第二拾取动臂505另一端连接机械爪,所述第一拾取伸缩杆507一端与拾取机械臂底座509铰接,第一拾取伸缩杆507另一端与第一拾取动臂508铰接,第二拾取伸缩杆506一端与第一拾取动臂508铰接,第二拾取伸缩杆506另一端与第二拾
取动臂505铰接,第三拾取伸缩杆504一端与第二拾取动臂505铰接,第三拾取伸缩杆504另一端连接机械爪,机械手用于拾取清理固体化工废品及化工废品包装,如试剂瓶等,试剂瓶掉落在底面会产生液体试剂遗漏,产生液体化工废品,此时配合清洁装置进行清理。
30.机械爪包括支架503、手爪伸缩杆502、手爪501,所述支架503连接于第三拾取伸缩杆504端部,手爪伸缩杆502一端与支架503铰接,手爪伸缩杆502另一端与手爪501爪身铰接,手爪501一端与支架503铰接。
31.清水喷头6固定在车体2上,通过线缆与电源10相连,保证喷头的正常工作,且通过线缆与控制与信息传输模块8连接,发现液体化工废品后控制与传输信息模块8发送工作信号给清水喷头6,喷头工作喷水清理污渍。
32.气体传感器7通过胶接形式固定在车体2上,气体传感器7通过线缆与电源10相连,保证气体传感器7的正常工作,且通过线缆与控制与信息传输模块8连接。气体传感器7将测量结果通过无线信号的形式把气体数据传输给信息传输与控制模块8,然后信息传输与控制模块8通过无线传输的形式将测量的气体数据传输到计算机。温度传感器9通过胶接形式固定在车体2上,温度传感器通过线缆与电源10相连,保证温度传感器的正常工作,且通过线缆与控制与信息传输模块8连接。温度传感器9将测量结果通过无线信号的形式把温度测量数据传输给控制与信息传输模块8,然后控制与信息传输模块8通过无线传输的形式将测量的温度数据传输到计算机。
33.控制与信息传输模块8通过胶接的方式固定与车体2的上方,根据收集装置的实际工作情况以线缆传输的方式控制清水喷头6、电磁控制器303、清洁装置第三清洁伸缩杆304、第二清洁伸缩杆306、第一清洁伸缩杆308、手爪伸缩杆502、第三拾取伸缩杆504、第二拾取伸缩杆506和第一拾取伸缩杆507的伸缩,摄像头4的拍摄、气体传感器7和温度传感器9的收集。在检测过程中,通过无线传输技术将摄像头4采集到的画面、气体传感器7收集的数据、温度传感器9收集的数据与信息准确的传输到计算机上。
34.电源10通过胶接的方式固定于车体2的上方。采用7.4v2200mah锂电池,提高倍率性能,明显降低了循环过程的动态内阻增幅,提高装置的动力输出;是整个装置的供电部分。
35.上述清理装置在实验室环境进行化工废品清理时,具体步骤如下:
36.首先将清理装置放置在实验室内指定位置处,使得摄像头对准于实验室地面,然后接通电源,打开计算机。打开装置的电源开关,电机给收集装置提供动力,按0.05m/s的速度进行移动且摄像头开始记录实验室地面的信息,装置进入实验室环境,气体传感器7和温度传感器9采集数据信息通过无线信号传输方式将信息传输到计算机端,相应安全人员对实验室环境进行判断,若气体、温度数据不达标将数据反映给相关人员进行处理;摄像头通过线缆将图像信息传输到控制与信息传输模块再经无线传输技术将信息传输至计算机端,以便相应的安全人员对实验室环境做出分析。在小车移动过程中,如遇到固体化工原料废品需要收集时,将机械手工作的信息通过无线方式经控制与信息传输模块传输给机械手,机械手工作抓取废品运输到收集处,计算机端将清洁装置工作信息通过无线方式经控制与信息传输模块传输给清洁装置,如果固体化工废品或化工废品包装遗留有污渍,则清水喷头6对污渍处喷水,并通过清洁装置配合清理,如果遇到液体化工废品,则清水喷头对污渍处喷水后清洁装置直接进行清理。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1