一种排污管道清洗机器人的制作方法
1.本实用新型涉及管道清洗的技术领域,具体涉及一种排污管道清洗机器人。
背景技术:
2.排污管道是重要的城市基础工程设施之一,其主要服务对象是居民生活用水、工业企业废水和雨污水等,主要服务目的是高效、迅速、便捷、安全的收集并输送各类污水到污水统一处理排放池,因此研究排污管道的建设及养护具有重要意义。
3.在进行排污管道的清洗时,作业人员常常需要利用竹片、不锈钢的钢条以及其他坚硬的工具推入管道里,将管道内堵塞的物质进行疏通,随后利用自来水管进行管道压力冲水,将管道内部的污泥冲刷掉。
4.针对上述中的相关技术,发明人认为作业人员手动操作工具及水管进行排污管道的清洗,不仅作业人员操作吃力,而且清洗范围有限。
技术实现要素:
5.为了减轻作业人员的体力负担,同时扩大对排污管道的清洗范围,从而提供一种排污管道清洗机器人。
6.本实用新型提供的排污管道清洗机器人包括:
7.电机,所述电机上伸出有驱动轴;
8.四轴齿轮箱,所述四轴齿轮箱上伸出有输入轴、侧输出轴以及前输出轴,四轴齿轮箱与电机相固定,且输入轴与驱动轴相连接;
9.高压水喷头,所述高压水喷头设置在四轴齿轮箱上;
10.脚轮单元,所述脚轮单元与侧输出轴相连接;
11.清洁单元,所述清洁单元包括固定件以及清洁杆,清洁杆固定在固定件上,且固定件与前输出轴相连接。
12.可选地,所述脚轮单元设置有两组,且两组脚轮单元分别位于四轴齿轮箱的两侧。
13.可选地,所述脚轮单元包括连接轴、骨架以及若干叶片,连接轴的两端分别固定连接侧输出轴以及骨架,且若干叶片固定在骨架上。
14.可选地,所述骨架为半球罩形,连接轴与骨架的凹面内壁相连接,叶片与骨架的凸面外壁相连接,且叶片远离骨架的侧边为弧形。
15.可选地,若干所述叶片在骨架的凸面外壁上等距阵列排布。
16.可选地,所述电机上设置有辅助轮单元,辅助轮单元包括固定块以及辅助轮,固定块与电机固定连接,且辅助轮转动连接在固定块上。
17.可选地,所述辅助轮呈半球形。
18.可选地,所述清洁杆为弹性材质的清洁杆。
19.可选地,所述固定件背离四轴齿轮箱的一端固定连接有粉碎轮。
20.可选地,所述电机上固定连接有高清摄像头。
21.本发明技术方案,具有如下优点:
22.1.本发明通过设置四轴齿轮箱,合理的将电机的输出动力进行了分配;其中脚轮的设计,有助于推动整个清洗机器人在管道内运动,突破了以往管道清洗的有限距离,扩大了管道清理的范围;而清洁单元以及高压水喷头,能够双重对管道内壁进行清洁,不仅提升了清洁效率,还减轻了作业人员的体力负担。
23.2.本发明提供的脚轮单元以及辅助轮单元相配合,能够更好的为清洗机器人提供支撑,除此之外,两者特殊的结构能够与圆柱形管道内壁的弧度相匹配,在实际应用时,为清洗机器人提供更强劲的抓地力。
24.3.本发明在清洁单元上设置有粉碎轮,粉碎轮能够对排污管道内堆积的水泥块、砂石等进行粉碎或疏通,在此过程中,高清摄像头能够对管道内情况进行监控,便于作业人员实时掌握管道内情况。
附图说明
25.为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
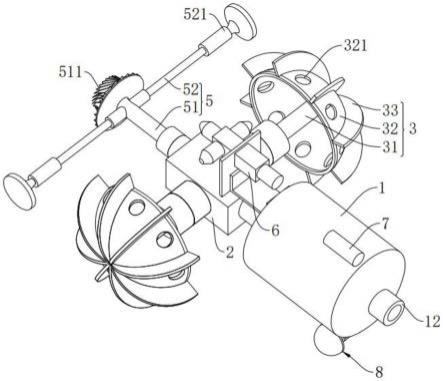
26.图1为实施例1的整体结构示意图;
27.图2为隐去脚轮单元的局部示意图;
28.图3为实施例2的整体结构示意图。
29.附图标记说明:1、电机;11、驱动轴;12、接线口;13、固定板;2、四轴齿轮箱;21、输入轴;22、侧输出轴;23、前输出轴;24、支撑板;3、脚轮单元;31、连接轴;32、骨架;321、通孔;33、叶片;4、破碎钻头;5、清洁单元;51、固定件;511、粉碎轮;52、清洁杆;521、配重块;6、高压水喷头;61、进水口;62、喷水口;7、高清摄像头;8、辅助轮单元;81、固定块;82、辅助轮。
具体实施方式
30.下面将结合附图对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
31.在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
32.此外,下面所描述的本发明不同实施方式中所涉及的技术特征只要彼此之间未构成冲突就可以相互结合。
33.实施例1
34.本实施例提供一种排污管道清洗机器人,参照图1和图2,包括电机1、四轴齿轮箱2、脚轮单元3、清洁单元5以及高压水喷头6;在该机器人处于工作状态时,电机1为四轴齿轮箱2提供动力,四轴齿轮箱2将动力传递给脚轮单元3以及清洁单元5,在脚轮单元3的推力作
用下,清洗机器人在管道内行走,清洁单元5以及高压水喷头6对管道内壁进行清洗。
35.参照图1,电机1的一端设置有接线口12,在本实施例中,电机1的机芯设置在机套中,以起到防水效果;电机1的顶部固定连接有高清摄像头7,在本实施例中高清摄像头7像素为500万,以满足作业人员对排污管道内情况、清洗机器人工作状态的实时监控。
36.参照图1和图2,电机1的底端设置有辅助轮单元8,辅助轮单元8包括固定块81以及两个辅助轮82,固定块81焊接在电机1底部,且两个辅助轮82分别转动配合于固定块81的两侧;两个辅助轮82均为半球形,且凸面相互背对,清洗机器人处于行走状态时,辅助轮82能够提升其行走时的平衡性。
37.参照图2,四轴齿轮箱2的顶部固定连接有支撑板24,支撑板24竖直设置;高压水喷头6固定连接在支撑板24上,在本实施例中,高压水喷头6上设置有一个进水口61,以及三个不同方向的喷水口62,在将清洗机器人放入排污管道前,将高压水管连接进水口61,当清洗机器人处于工作状态时,三个喷水口62同时喷水,以对排污管道进行全方位的冲刷与清洗。
38.参照图2,电机1与四轴齿轮箱2之间设置有固定板13,固定板13呈u型,且固定板13的竖直段分别固定贴合电机1以及支撑板24,以用于固定电机1与四轴齿轮箱2的相对位置;电机1伸出有驱动轴11,且四轴齿轮箱2上伸出有输入轴21,驱动轴11与输入轴21同轴固定连接,启动电机1后,驱动轴11即可将动力通过输入轴21传递给四轴齿轮箱2。
39.参照图1和图2,四轴齿轮箱2上伸出有两根侧输出轴22,两根侧输出轴22分别位于四轴齿轮箱2相互背对的侧壁上;脚轮单元3设置有两个,且每个脚轮单元3对应一根侧输出轴22;当电机1的动力输入后,两根侧输出轴22带动脚轮单元3运动。
40.参照图1,脚轮单元3包括连接轴31、骨架32以及叶片33,连接轴31与侧输出轴22同轴固定连接;骨架32为半球罩型,且骨架32的凹面内壁与连接轴31固定连接;叶片33设置有若干个,且叶片33垂直于骨架32的凸面外壁,若干个叶片33在骨架32的凸面外壁上呈圆周阵列排布,该圆周阵列的中心线即为骨架32的中心轴线;叶片33背离骨架32的一侧为弧边,当脚轮单元3在管道内行走时,叶片33的弧边与管道内壁相接触,进而提升脚轮单元3的抓地力。
41.参照图1,骨架32上开设有若干通孔321,通孔321在骨架32上呈圆周阵列排布,且通孔321与叶片33相间分布,通孔321能够降低骨架32的重量,节省材料,除此之外,当骨架32浸入污水中时,通孔321能够平衡骨架32凹面与凸面两侧的压力,有助于降低骨架32行走时的阻力。
42.参照图2,四轴齿轮箱2上伸出有前输出轴23,前输出轴23位于四轴齿轮箱2背对电机1的一侧,且前输出轴23的一端与清洁单元5相连接;清洁单元5包括固定件51以及清洁杆52,固定件51呈t字型,且固定件51的一端与前输出轴23固定连接;清洁杆52垂直于前输出轴23,且清洁杆52设置有两根,清洁杆52为弹性材质,且在本实施例中,清洁杆52为弹簧钢材质;两根清洁杆52分别位于固定件51相互背对的两端,且清洁杆52远离固定件51的一端均固定套设有配重块521,配重块521的直径大于清洁杆52。
43.参照图2,当前输出轴23旋转时,带动固定件51旋转,固定件51带动清洁杆52旋转,此时清洁杆52的自由端对管道内壁进行污垢脱离;在配重块521离心力的作用下,清洁杆52能够保持较为稳定的旋转状态,由于清洁杆52为弹性材质,因此不易与管道形成刚性碰撞,减少了对管道的损伤,同时能够延长清洁杆52自身的使用寿命;在实际应用中,能够根据不
同直径的排污管道选择不同长度的清洁杆52。
44.参照图2,固定件51背离前输出轴23的一端固定有粉碎轮511,当清洗机器人在管道内行走时,粉碎轮511能够破碎砂石、水泥块等障碍物,以保护清洁杆52的正常运行。
45.本实施例的实施原理为:首先根据排污管道的内径选择合适尺寸型号的清洗机器人,随后依次将电机1、高清摄像头7接通电源,将高压水喷头6连接上高压水管;将清洗机器人放入管道内,电机1输出的动力传递给四轴齿轮箱2,此时脚轮单元3行走于管道内,清洁单元5以及高压水喷头6对管道进行清洗,作业人员通过高清摄像头7即可对管道内环境、清洗机器人工作状态进行实时监控。
46.实施例2
47.参照图1和图3,与实施例1不同之处为,将清洁单元5更换为破碎钻头4,破碎钻头4与前输出轴23的端部固定连接,破碎钻头4与脚轮单元3的结构一致,但破碎钻头4的尺寸小于脚轮单元3,破碎钻头4的凸面背对前输出轴23,当清洗机器人在管道内行走时,破碎钻头4对管道内坚硬的堵塞物进行粉碎,在进行管道疏通的同时,降低了该部分垃圾杂物对清洗机器人的阻挡。
48.显然,上述实施例仅仅是为清楚地说明所作的举例,而并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其他不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引申出的显而易见的变化或变动仍处于本发明创造的保护范围之中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1