一种管道清洁机器人的工作方法
本发明涉及仿生机器人,具体涉及一种管道清洁机器人的工作方法。
背景技术:
1、随着生产的需要和科学技术的发展,从20世纪50年代以来,人们已经认识到生物系统是开辟新技术的主要途径之一,自觉地把生物界作为各种技术思想、设计原理和创造发明的源泉。人们用化学、物理学、数学以及技术模型对生物系统开展着深入的研究,促进了生物学的极大发展,对生物体内功能机理的研究也取得了迅速的进展。此时模拟生物不再是引人入胜的幻想,而成了可以做到的事实。生物学家和工程师们积极合作,开始将从生物界获得的知识用来改善旧的或创造新的工程技术设备。生物学开始跨入各行各业技术革新和技术革命的行列,而且首先在自动控制、航空、航海等军事部门取得了成功。于是生物学和工程技术学科结合在一起,互相渗透孕育出一门新生的科学——仿生学。仿生蛇,它根据蛇的生理结构和运动特点,设计和研究蛇形机器人的结构和运动,是从仿生学的角度出发研制有利于人类社会的机器人。
2、蛇形机器人本体横截面明显小于总长度,这使它们能够进入小管道或孔口,能够弯曲并适应不规则的地形,从而到达其他机器人无法到达的地方。根据机器人的辅助运动结构将蛇形机器人分为无轮式、被动轮式和主动轮式。如中国专利申请号为202210203020.3,公布日为2022.06.14的专利文献中公开了一种蛇形管道疏通机器人。该发明所述的一种蛇形管道疏通机器人,包括蛇头部、躯干单元、蛇尾部、图像识别单元和控制单元;该文献正是采用了从动轮式的运动结构。但是,该文献中是通过每个躯体上设置有上下摆动的驱动电机以及左右摆动的驱动电机实现移动,这样结构比较复杂,且每个驱动在不同方向上设置有两个机电使得平衡性不好,因此采用该文献的结构使得其运动的工作方法也比较复杂。
技术实现思路
1、本发明的目的在于提供一种管道清洁机器人的工作方法,通过两个以上的爬行组件和设置在相邻爬行组件之间的拼接组件组成蛇身,在移动时能够模仿蛇的姿态进行运动,从而能够使得管道清洁机器人可以在进入管道内实现清洁,工作方法简单,清洁效果好。
2、为达到上述目的,本发明提供一种管道清洁机器人的工作方法,所述管道清洁机器人包括蛇头机构、蛇身机构和清洁机构,所述蛇头机构设置在蛇身机构的前端,在蛇身机构上设有清洁机构,所述蛇身机构包括两个以上的爬行组件和一个以上的拼接组件,所述拼接组件设置在相邻的爬行组件之间,所述拼接组件和爬行组件依次相连形成蛇身,在蛇身前端的拼接组件上设有蛇头机构,在蛇身中部的拼接组件上设有清洁机构;所述蛇头机构包括控制单元和摄像部件,所述摄像部件和控制单元设置在拼接组件上,所述控制单元与爬行组件和拼接组件电连接且控制单元驱动爬行组件和拼接组件动作设置。
3、所述爬行组件包括爬行主板、爬行固定板、爬行驱动安装板、爬行舵机和爬行底板,所述爬行固定板安装在爬行主板的顶端且爬行固定板向爬行主板的一侧延伸,所述爬行固定板连接位于爬行主板一侧的拼接组件;在爬行主板的另一侧设有爬行驱动安转板,在爬行驱动安装板上设有爬行舵机,所述爬行舵机的驱动端与位于爬行主板另一侧的拼接组件连接,在爬行主板的底端设有爬行底板,在爬行底板的底部设有一个以上的摩擦部件;所述爬行舵机带动拼接组件向蛇身的两侧方向摆动;所述爬行舵机与控制单元电连接。
4、清洁机构包括清洁安装板、旋转舵机、清洁连接板、清洁电机和清洁部件,所述清洁安装板固定在拼接组件上,清洁安装板的两端向蛇身的两侧延伸,在清洁安装板的两端设有旋转舵机,所述旋转舵机的驱动端上设有清洁连接板,在清洁连接板上设有清洁电机,所述清洁部件设置在清洁电机的驱动轴上。
5、具体步骤包括:
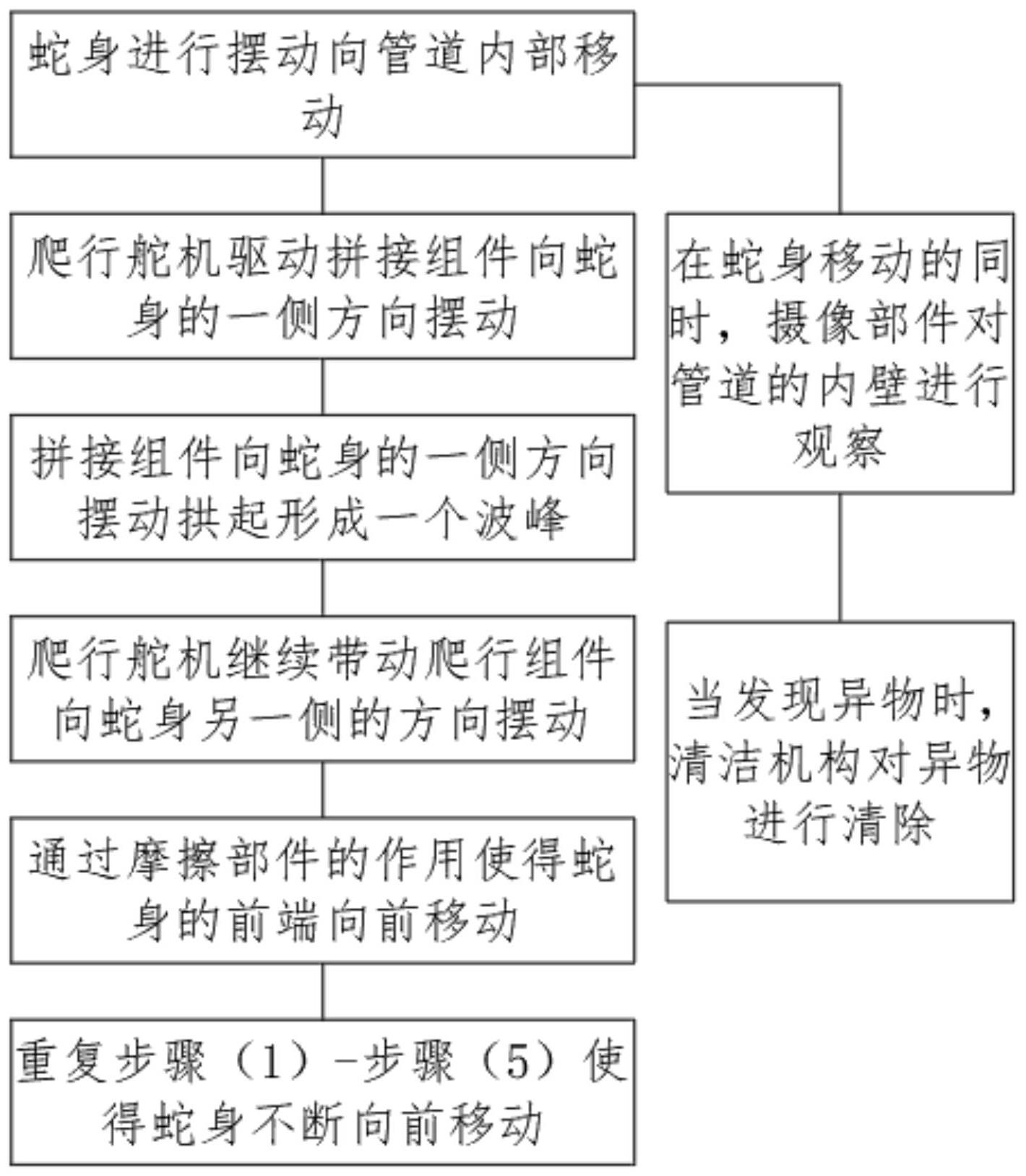
6、s1蛇身进行摆动向管道内部移动。
7、(1)爬行舵机驱动拼接组件向蛇身的一侧方向摆动。
8、(2)拼接组件向蛇身的一侧方向摆动拱起形成一个波峰。
9、(3)蛇身的尾部被带动向前移动。
10、(4)爬行舵机继续带动爬行组件向蛇身另一侧的方向摆动。
11、(5)通过摩擦部件的作用使得蛇身的前端向前移动。
12、(6)重复步骤(1)-步骤(5)使得蛇身不断向前移动。
13、s2在蛇身移动的同时,摄像部件对管道的内壁进行观察。
14、s3当发现异物时,清洁机构对异物进行清除。
15、上述方法,通过两个以上的爬行组件和设置在相邻爬行组件之间的拼接组件组成蛇身,在移动时能够模仿蛇的姿态进行运动,同时爬行组件和拼接组件在移动时可以改变它们的重心使得支撑点转移,由此保证蛇身在运动时保持平稳;爬行时,爬行舵机驱动拼接组件向蛇身的一侧方向摆动,蛇身在摆动时,从而使得前一个爬行组件在摆动后,与该爬行组件连接的拼接组件即可拱起形成一个波峰,拼接组件拱起时带动蛇身的尾部向前移动,蛇身的后端相对蛇身前端的摆动而向前移动一定的距离,爬行舵机继续带动爬行组件向蛇身另一侧的方向摆动,通过摩擦部件的作用使得蛇身向后的摩擦力大于向前的摩擦力由此即可推动蛇身向前移动,由于拼接组件通过爬行舵机的带动进行摆动,从而使得爬行组件的重心始终保持在爬行舵机上,因此,当爬行舵机在摆动时,蛇身的支撑点会跟随爬行组件的摆动而转移,由此保证了蛇身在运动时能够保持平稳;且摩擦部件可以增加爬行组件与管道底面的摩擦力,从而使得蛇身对底面的附着力更好,防止蛇身打滑而难以移动。
16、且通过设置清洁机构,当爬行机器人在管道内移动时,通过蛇头机构的摄像部件对管道的内壁进行观察检测,当发现管道的内壁出现异物时,可以通过清洁机构对异物进行清除。
17、进一步的,所述拼接组件包括拼接主板、拼接固定板、拼接驱动安装板和拼接驱动舵机,所述拼接固定板安装在拼接主板的顶端且拼接固定板向拼接主板的一侧延伸,所述拼接固定板连接位于拼接主板一侧的爬行舵机的驱动端上;在拼接主板的另一侧设有拼接驱动安装板,在拼接驱动安装板上设有拼接驱动舵机,所述拼接驱动舵机的驱动端连接位于拼接主板另一侧的爬行固定板上;所述拼接驱动舵机带动爬行固定板向蛇身的两侧方向摆动;所述拼接驱动舵机与控制单元电连接。
18、以上设置,当前一个爬行舵机驱动后一个拼接组件进行摆动时,拼接驱动舵机同步驱动下一个爬行组件进行摆动,由此使得蛇身能够进行摆动进而驱动蛇身向前移动。
19、进一步的,步骤s3具体包括:
20、s31旋转舵机转动使得清洁连接板向蛇身的两侧摆动;
21、s32清洁电机驱动清洁部件转动对异物进行清除。
22、以上设置,通过清洁机构,当管道清洁机器人在管道内移动时可以同步对管道的内壁进行清洁。
23、进一步的,所述清洁部件包括清洁筒和清洁刷,所述清洁筒设置在清洁电机的驱动轴上,所述清洁刷设置在清洁筒内,在清洁筒的侧壁上设有沿清洁筒的长度方向延伸设置的调整槽,所述调整槽的底端设有沿清洁筒的宽度方向延伸设置的限位槽,在调整槽的顶端设有沿清洁筒的宽度方向延伸设置的固定槽,在清洁刷的底部设有沿着调整槽滑动的限位杆,所述限位杆与限位槽和固定槽相对应设置;步骤s3具体包括在对管道进行清洁前,调节清洁刷,使得清洁刷的限位杆固定在固定槽内。
24、以上设置,通过带动清洁刷向上移动,使得限位杆沿着调整槽的长度方向移动,当限位杆移动到调整槽的顶端时,将限位杆卡入固定槽内即可将清洁刷固定,从而即可使得管道清洁机器人在管道内移动时进行清洁工作。
25、进一步的,所述蛇头机构还包括蛇头安装板,所述蛇头安装板固定在拼接固定板上,在蛇头安装板的前端设有摄像部件,在蛇头安装板上设有控制单元。由此设置,通过控制单元控制蛇身的移动,从而实现蛇身移动的同步,使得管道清洁机器人能够稳定向前移动。
26、进一步的,所述摄像部件为摄像头,所述摄像头连接控制单元。通过摄像头对管道的内壁进行检测,从而即可控制管道清洁机器人进行清洁。
27、进一步的,所述摩擦部件包括连接部和摩擦部,所述摩擦部通过连接部固定在爬行底板上,所述摩擦部后端的底部自连接部向上向后倾斜延伸至摩擦部的顶端;步骤(5)具体包括通过摩擦部后端倾斜的设置抵消蛇身向后的作用力,使得蛇身向后的摩擦力大于向前的摩擦力,从而使得蛇身在摆动向前移动时能够带动蛇身后端向前移动而不会向后移动。
28、以上设置,当蛇身在摆动后,由于摩擦部后端的底部自连接部向上向后倾斜延伸至摩擦部的顶端而形成了倾斜面,当蛇身在摆动时,由于摩擦部后端的倾斜设置,使得摩擦部后端的顶端面与后壁面形成一定的尖角,由此蛇身向后的作用力会被尖角抵消,从而使得蛇身向后的摩擦力大于向前的摩擦力,从而使得蛇身在摆动向前移动时能够带动蛇身后端向前移动而不会向后移动。
29、进一步的,所述摩擦部的前端自摩擦部的顶端向下向前弧形延伸至连接部设置。以上设置,通过摩擦部前端弧形的设置,可以减小摩擦部前端与管道底面的摩擦力,使得蛇身前进的摩擦力小于蛇身后退的摩擦力,由此保证蛇身能够向前进行移动。
- 还没有人留言评论。精彩留言会获得点赞!