一种轴箱无损分离回收设备及其使用方法与流程
本发明涉及机械零件回收领域,具体地说是一种轴箱无损分离回收设备及其使用方法。
背景技术:
1、铁路系统货车上的轴箱橡胶垫是采用硫化工艺将金属件和橡胶件粘合在一起,形成“三明治”式叠层结构。这种结构是减、隔振装置中最常用的。轴箱橡胶垫是加装在承载鞍和侧架间的重要部件,该类产品由于损坏、使用寿命到期、不良制造等原因,每年产生大量废品,所以需要对橡胶垫部分进行回收处理,同时轴箱的金属部分寿命要明显大于橡胶垫部分,所以金属部分还可以在去除橡胶垫后,二次加工使用。
2、现有技术中针对轴箱需要进行回收,回收过程中需要将顶盖、橡胶和底座分离拆解后分类回收,所以回收过程中需要将零件加热到一定温度;其中底盖和底座是金属件,和橡胶相互接触,需要加热一定温度后再将橡胶部分夹持住并分离,如果人为操作有一定操作风险,并且回收效率低,所以急需一种自动化的回收设备,能够将轴箱的顶盖、橡胶和底座之间相互分离并分类回收。
技术实现思路
1、本发明的目的在于提出一种轴箱无损分离回收设备及其使用方法,以解决上回收过程中需要加热一定温度后再将橡胶部分夹持住并分离,如果人为操作有一定操作风险,并且回收效率低,缺少针对轴箱的自动化回收设备的问题。
2、为实现上述目的,本发明提供以下技术方案:
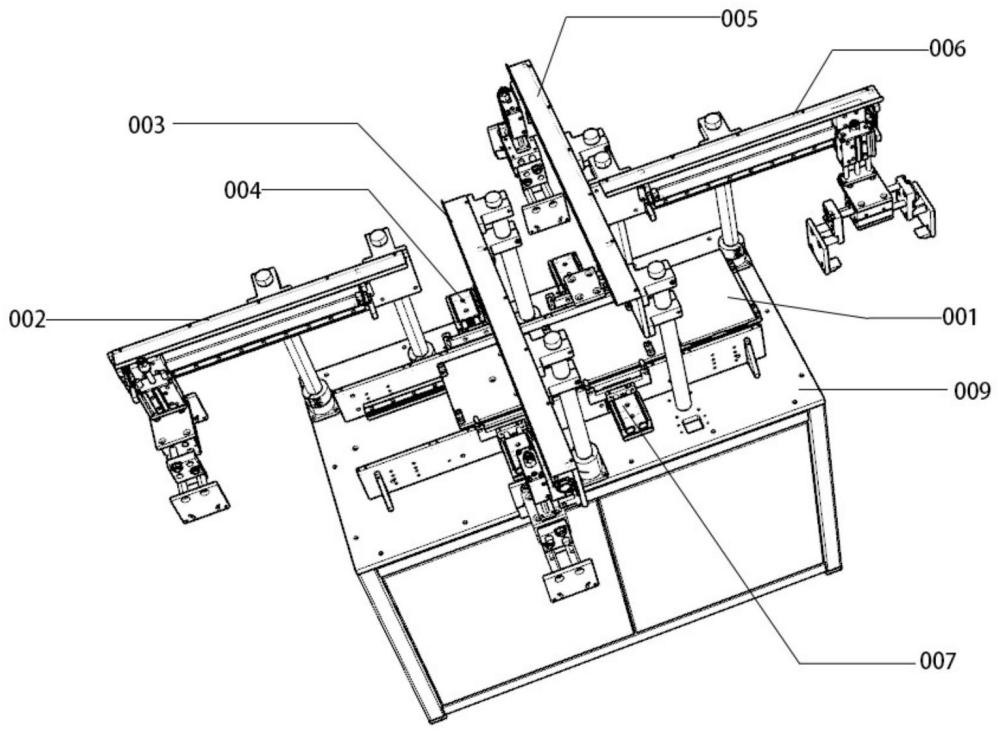
3、一种轴箱无损分离回收设备及其使用方法,包括工位转换平台001、第一机械臂模块002、第二机械臂模块003、第三机械臂模块005、第四机械臂模块006、第二夹紧模块004、第三夹紧模块007和用于安装和承载上述机构的工作台009;其中所述工位转换平台001包括工位转换顶板01、工位转换底板02、底板滑轨03、顶板驱动器04、平台驱动器05和平台侧挡板06,所述平台侧挡板06位于所述所述工位转换顶板01和所述工位转换底板02两侧,所述工位转换顶板01和所述工位转换底板02能够在所述平台驱动器05的驱动下一起在所述底板滑轨03上滑动,所诉顶板驱动器04安装在所述工位转换底板02下方,可以将所述工位转换顶板01顶起一定高度,使所述所述工位转换顶板01和所述工位转换底板02之间高度变大;所述第二机械臂模块003包括机械臂支撑柱11、所述机械臂固定块12、所述机械臂滑轨13、所述机械手固定块14、所述机械手驱动器15、所述机械手推板16、所述卡爪驱动器17和卡爪18,所述第一机械臂模块002、所述第三机械臂模块005和所述第四机械臂模块006与所述第二机械臂模块003的结构相同,只有所述第一机械臂模块003采用的卡爪为进料卡爪181;所述第二夹紧模块004位于所述第二机械臂模块003下方;所述第一机械臂模块002通过所述进料卡爪181将加热后的待回收件夹住后抬起,并运送到所述工位转换平台001上,所述工位转换平台001首先将所述工位转换顶板01降低并移动到最靠近所述第一机械臂模块002的一端,到达指定位置后将所述工位转换顶板01抬升,去承接加热后的待回收件,再带着将待回收件运动到所述第二机械臂模块003下方既所述第二夹紧模块004处,通过所述第二夹紧模块004将待回收件夹紧,此时所述工位转换顶板01降低,准备承接下一个待回收件;所述第二机械臂模块003会配合所述第二夹紧模块004将待回收件的顶盖801与橡胶部分分离,并带动到所述第二机械臂模块003的末端将所述顶盖801部分扔下并回收;所述工位转换平台001重复上述动作,将剩余待回收件运送到所述第三机械臂模块005和所述第三夹紧模块007下方工位处,所述第三机械臂模块005会配合所述第三夹紧模块007将待回收件的中层橡胶夹起使其与底座部分分离,并带动到所述第三机械臂模块005的末端将中层橡胶部分扔下并回收;所述工位转换平台001继续重复上述动作,分离后的待回收件会运动到第四机械臂模块006处的工位,所述第四机械臂模块006的所述卡爪18将剩余的底座部分夹起,并带动到所述第四机械臂模块006的末端将底座部分扔下并回收,完成整个待回收件的分类回收。
4、所述工位转换平台001整体呈长条矩形,位于所述工作台009中间,所述工位转换顶板01上表面上设有三组顶板限位块011,每组包括四个,且呈矩形排列,恰好可以将待回收件卡入四个所述顶板限位块011中间;所述工位转换顶板01的底部固定安装有四个顶板导柱012,所述工位转换底板02上的所述顶板导柱012对应位置处设有底板导向筒022,所述工位转换底板02的底部两侧固定连接有底板滑块021,所述底板滑块021设有多个,且可以和所述底板滑轨03相配合,所述底板滑轨03固定安装在所述平台侧挡板06内侧的滑轨固定板061上,使所述工位转换底板02能够在所述底板滑轨03上滑动,所述工位转换底板02的两端底部固定安装有所述顶板驱动器04,所述顶板驱动器04上设有顶板驱动杆041,所述顶板驱动器04可以通过所述顶板驱动杆041将所述工位转换顶板01顶起,使所述工位转换顶板01上升;
5、所述工位转换底板02的中间处设有固定连接的底板推板07,所述底板推板07和所述工位转换底板02之间相互垂直且设有加强筋,所述工作台009的底面上中间处开设有矩形孔且下方固定安装有所述平台驱动器05,所述平台驱动器05设有一平台驱动器推杆051,所述平台驱动器推杆051和所述底板推板07远离所述工位转换底板02的一端固定连接,所述平台驱动器05可以驱动所述平台驱动器推杆051带动所述底板推板07做直线往复运动,从而带动整个所述工位转换平台001运动。
6、所述第一机械臂模块002、所述第三机械臂模块005和所述第四机械臂模块006与所述第二机械臂模块003的整体结构相同,以所述第二机械臂模块003为例,所述第二机械臂模块003通过两根所述机械臂支撑柱11固定到所述工作台009上,所述机械臂滑轨13设有两条分别固定在机械臂滑轨固定板131上,每个所述机械臂支撑柱11通过两个所述机械臂固定块12与所述机械臂滑轨固定板131固定,所述机械臂滑轨13上设有能够与之配合的机械臂滑块132,两个所述机械臂滑块132之间设有机械手固定块14,所述机械手固定块14中间设有圆柱形中空,可以套在固定块滑轨141上,所述固定块滑轨141为光滑圆柱,所述固定块滑轨141在两条所述机械臂滑轨13之间;所述机械手固定块14通过螺钉和所述机械手驱动器15固定连接,所述机械手驱动器15上设有所述机械手推板16且可以,所述机械手推板16和所述卡爪驱动器17固定连接,所述卡爪驱动器17两侧分别设有一个卡爪18,所述卡爪18的底端两边分别设有一个卡爪固定块1801,所述卡爪固定块1801呈梯形且末端为尖端,所述卡爪驱动器17可以驱动所述卡爪18向两侧运动或相向运动。
7、所述第一机械臂模块002的结构与所述第二机械臂模块003相同,只有采用的卡爪为所述进料卡爪181,所述进料卡爪181的最底端中间设有一个进料卡爪固定块1811,所述进料卡爪固定块1811呈矩形,所述进料卡爪固定块1811需要直接从加热炉中承接待回收件并放到所述工位转换平台001上,为了方便直接采用所述进料卡爪固定块1811卡住所述待回收件底部两个凸起的中间凹槽处即可将整个待回收件卡紧,进行移动。
8、作为优选,所述第一机械臂模块002和第四机械臂模块006的滑动方向与所述工位转换平台001滑动方向相互平行,所述第二机械臂模块003和所述第三机械臂模块005的滑动方向与所述工位转换平台001滑动方向垂直。
9、所述机械手推板16通过三根推板导柱161和所述机械手驱动器15连接,且中间的所述推板导柱161上设有推板限位块162,所述推板限位块162和所述推板导柱161之间采用螺纹连接固定;所述固定块滑轨141的两端分别用螺栓固定到滑轨挡板142上,防止所述机械手固定块14滑脱。
10、所述第三夹紧模块007和所述第二夹紧模块004结构相同,以所述第二夹紧模块004为例包括固定板加强筋41、固定板42、夹紧块驱动器43和夹紧块44,所述夹紧块44的两端分别设有锥形凸起,确保夹紧效果,所述第二夹紧模块004和所述平台侧挡板06固定连接,且所述第二夹紧模块004设有两组,分别安装于所述工位转换平台001的两侧;需要夹紧时,两个所述夹紧块驱动器43分别驱动所述夹紧块44相向运动,对待回收件起到夹紧效果,当需要松开待回收件时,两个所述夹紧块驱动器43分别驱动所述夹紧块44向相反方向运动。
11、一种轴箱无损分离回收设备的使用方法,其特征在于,包括以下步骤:
12、s1、所述第一机械臂模块002夹取加热后的待回收件,并运动到所述工位转换平台001上。
13、s2、所述工位转换平台001将待回收件运送到所述第二夹紧模块004处,在所诉第二夹紧模块004和所述第二机械臂模块003的配合下将待回收件的顶盖分离,并通过所述第二机械臂模块003投放到指定位置回收;
14、s3、所述工位转换平台001将待回收件的橡胶和底座部分从所述第二夹紧模块004处运动到所述第三夹紧模块007处,在所述第三夹紧模块005和所述第三机械臂模块005的配合下,将待回收件的橡胶部分和底座部分分离,并通过所述第三机械臂模块005投放到指定位置回收;
15、s4、所述工位转换平台001将待回收件的底座部分从所述第三夹紧模块007处运动到所述第四机械臂模块005处,通过所述第四机械臂模块005将待回收件的底座部分投放到指定位置回收。
16、与现有技术相比,本发明有益效果如下:
17、本发明通过自动化设备即可将轴箱的顶盖、橡胶和底座部分进行分离并回收,采用机械手驱动夹取加热后的待回收件,再移动到指定位置放到其他工位夹紧块处进行处理,利用工位转换平台将待回收件移动到本发明的各个工位处,再通过机械臂上的机械手驱动器和卡爪与夹紧模块配合,分别将顶盖和橡胶部分分离回收,最后再将剩余的底座部分收集回收,整个过程简单且稳定,回收效率高,适合大批量自动化回收。
- 还没有人留言评论。精彩留言会获得点赞!