一种两段式的管道清洁机器人
本发明涉及管道清洁,具体为一种两段式的管道清洁机器人。
背景技术:
1、随着我国交通、石油、化工以及中国城市文化建设的飞速发展,管道作为一种社会经济、高效的物资的长途运输越来越受到人们的重视,我国从20世纪70年代开始大规模建设油气管道,到目前为止,国内已建成油气管道总长约6万公里,逐步形成区域油气管网供应格局。中国的管道进行工业得到了一个极大的发展。在管道进行工业发展的同时管道的内壁清洁问题也逐渐严峻,目前,全球范围内针对管道清洁问题仍然没有一个很好的对策,通过人工清洁的方式能够达到的效果十分有限,且工业管道系统通常非常庞大复杂,其中某些区域对于人类操作员来说很难到达,石油管道若未经彻底清洁,其内部可能会积聚各种污垢、沉积物和杂质,这些物质会逐渐堆积并形成堵塞。堵塞会导致石油流量减少,甚至完全阻塞管道,影响石油输送的正常运行。管道内的污垢和沉积物可能包含腐蚀性物质,长期积累会导致管道壁面的腐蚀。腐蚀会削弱管道的结构强度,增加管道泄漏和破裂的风险,进而引发严重的环境事故和石油泄漏。管道清洁不干净会导致石油输送过程中的故障和中断,从而造成经济损失。维修和恢复管道运行的费用昂贵,并且中断石油输送有可能影响供应链和能源市场稳定性。
2、但随着技术的不断发展,针对上述情况研发了管道清洁机器人,其也是一种适用于特殊工作环境的专用机器人,它可以沿着管道内壁行走并通过特定清扫功能对油气管道内壁附着的油污实现清扫、收集、运输的功能。清洁机器人可以通过灵活的设计和机械臂等装置,进入并清洁这些难以清洁的区域,确保彻底的清洁效果。但通过机械装置清洁仍然存在各种问题:工业管道内部常常积聚着各种污垢、沉积物、固体颗粒或化学物质,通过高压水枪喷射或者别的方式清洁后,污渍难以带出管道;机械装置难以通过管道的转弯处。
技术实现思路
1、针对现有技术的不足,本发明提供了一种两段式的管道清洁机器人,解决了现有的管道清洁机器人无法将清洁的污渍带出管道,并且难以通过管道转弯处的问题。
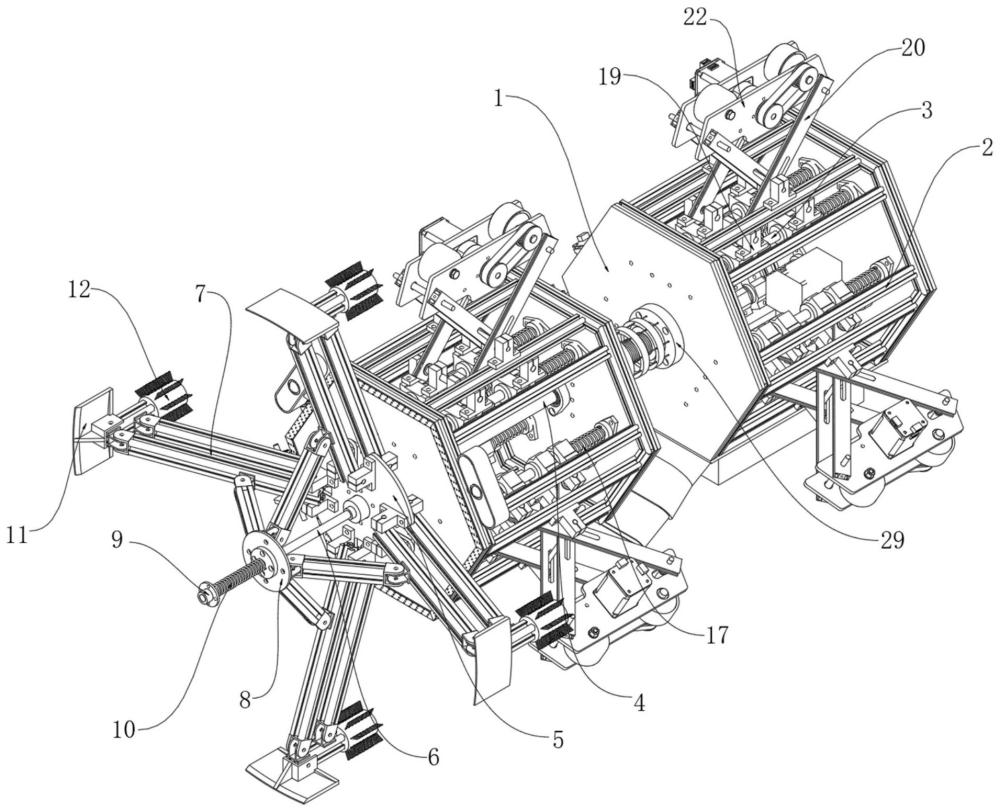
2、为实现以上目的,本发明通过以下技术方案予以实现:一种两段式的管道清洁机器人,包括:
3、两段式机身,其作为整体管道清洁机器人的基础安装构件,用于安装和装配各个配套使用机构及其所属结构件;
4、回旋式对称伸缩清洁机构,其设置于其中一组六棱柱的中部,用于对管道内壁油污进行清洁;
5、交叉轮腿式伸缩变径机构,其设置与直线导轨的外部,用于使管道清洁机器人适应不同直径的管道使用;
6、直线驱动机构,其设置于交叉轮腿式伸缩变径机构的外壁,用于驱动管道清洁机器人在管道的内壁进行移动;
7、可变曲率机构,其设置于两组六棱柱的相对侧,用于使管道清洁机器人适应弯曲的管道使用;
8、吸污储污机构,其设置于其中一组六棱柱的外壁,用于对清理的油污进行收集并储存。
9、优选的,所述两段式机身包括两组六棱柱,两组所述六棱柱的外部均分别设置在管道清洁机器人的两侧,两组所述六棱柱的相对侧均固定连接有多个支撑骨架,两组所述六棱柱的相对侧均设置有多个直线导轨。
10、优选的,所述回旋式对称伸缩清洁机构包括活动杆,所述活动杆的中部转动连接在一组六棱柱的中部,所述活动杆的一端连接有爪盘,所述爪盘的中部连接有直线轴承一,所述直线轴承一的外壁套设有连接骨架,所述直线轴承一的另一端连接有刷盘轴,所述直线轴承一的外壁套设有压缩弹簧一,所述压缩弹簧一的外部设置在连接骨架和刷盘轴之间,所述爪盘的外壁转动连接有多组爪盘杆,多组所述爪盘杆的另一端均转动连接有清洁铲,所述清洁铲的外壁连接有软刷,所述软刷的外壁转动连接在爪盘杆的外部,其中一组所述六棱柱的内壁设置有驱动组件。
11、优选的,所述驱动组件包括伺服电机一,所述伺服电机一的外壁连接在一组六棱柱的内壁,所述伺服电机一的驱动端固定连接有主皮带轮一,所述活动杆的外壁固定连接有次皮带轮一,所述主皮带轮一和次皮带轮一的外壁套设有皮带一。
12、优选的,所述交叉轮腿式伸缩变径机构包括多组压缩弹簧二,每组所述压缩弹簧二的内部套设在直线导轨的外壁,所述直线导轨的外壁滑动连接有两个直线轴承二,两个所述直线轴承二的外壁均固定连接有两个底座,两组所述底座的相对侧均转动连接有x形杆,所述支撑骨架的外壁连接有限位座,所述限位座的外壁滑动连接在x形杆的中部。
13、优选的,所述直线驱动机构包括双侧板,所述双侧板的中部活动连接在x形杆的顶部,所述双侧板的外壁连接有伺服电机二,所述伺服电机二的驱动端固定连接有主皮带轮二,所述双侧板的外壁设置有次皮带轮二,所述主皮带轮二和次皮带轮二的外壁均套设有皮带二,所述双侧板的中部转动连接有主动轮,所述主动轮的外壁固定连接在次皮带轮二的中部,所述双侧板的中部转动连接有从动轮。
14、优选的,所述可变曲率机构包括两个连接座,两个所述连接座的外壁均分别连接在两组六棱柱的相对侧,两个所述连接座的中部设置有多个牵引钢丝,多个所述牵引钢丝的外壁套设有多个限位环,两个所述连接座的相对侧均固定连接有拉伸弹簧。
15、优选的,所述吸污储污机构包括收集箱,所述收集箱的外壁连接在另一组六棱柱的外壁,另一组所述六棱柱的内壁连接有气泵,所述气泵的驱动端连接在收集箱的外壁,所述收集箱的外壁固定连接有吸污嘴。
16、工作原理:在利用该管道清洁机器人在对管道进行清洁时,先将管道清洁机器人放置在管道的内部,随后启动伺服电机二,在伺服电机二的驱动下,使得主皮带轮二进行旋转,并带动皮带二进行运行,进而使得次皮带轮二进行同步旋转,在次皮带轮二的同步旋转作用下,使得主动轮进行同步旋转,配合从动轮,使得该管道清洁机器人在管道的内壁进行移动,随着管道内部直径的不同,管道内壁会对管道清洁机器人的接触点施加压力,在压缩弹簧二的作用下,形成正压力,进而形成动态平衡来实现“x”形杆的径向伸缩,从而使得该管道清洁机器人能够适应不同直径的管道,随着管道清洁机器人的运行,伺服电机一启动,使得主皮带轮一旋转,进而带动皮带一运行,进而使得次皮带轮一进行同步旋转,从而带动伺服电机一进行同步旋转,在伺服电机一的旋转作用下,可带动爪盘进行同步旋转,进而使得多个爪盘杆进行同步旋转,进而使得多个清洁铲对管道的内壁进行刮除,并带动多个软刷对管道的内壁进行擦洗,与此同时,通过压缩弹簧一推动爪盘上的直线轴承一实现变径,此时在经过管道的弯道时,通过多个内部电机的驱动,使得牵引钢丝收缩实现可变曲率机构的主动弯曲变形,带动二段机身主体相对位置的主动变化,使得机器人能够根据需要在管道内实现弯曲运动,适应不同形状和曲率的管道,并且在清洁时,启动气泵抽取气体在垃圾收集箱内部形成低气压,利用气压差将油气管道中清理的油污通过吸污嘴收集并储存在垃圾收集箱中,通过利用气压差,将油气管道中清理的油污通过吸污嘴收集。
17、本发明提供了一种两段式的管道清洁机器人。具备以下有益效果:
18、1、本发明通过压缩弹簧一推动爪盘上的直线轴承一实现变径,清洁铲与软刷沿径向并排连接在爪盘杆的末端,其原理为刷盘轴通过同步带传动与伺服电机一驱动,带动整体爪盘转动,实现了清洁铲对管道内壁污垢铲除,通过铲除污垢,可以保证管道内壁的清洁度,提高石油管道的流通效率,以及软刷对管道内壁清洁,可以对管道内壁进行彻底的清洁,并且软刷能够细致地清除管道内壁的细小颗粒和附着物,保证管道内壁的光滑度和清洁度的效果,刷盘轴与伺服电机一的同步带传动使得刷盘能够高效地旋转,提高清洁效率。同时,伺服电机一的驱动保证了清洁过程的稳定性和可靠性。
19、2、本发明通过利用压缩弹簧二的弹力与管壁对机器人施加正压力形成动态平衡来实现“x”形杆的径向伸缩,使得机器人可以适应不同直径的管道,无须更换部件或进行人工调整,提高了操作的便捷性和灵活性,同时保持与管道壁面的紧密接触,使得清洁铲和软刷等清洁部件能够更有效地清除污垢和沉积物,提高清洁的效果,并且通过与管壁施加正压力,机器人能够在管道内保持动态平衡。这有助于减少机器人在运动过程中的震动和晃动,提高了清洁的稳定性和准确性。
20、3、本发明的钢丝通过内部电机收缩实现可变曲率机构的主动弯曲变形,带动二段机身主体相对位置的主动变化,使得机器人能够根据需要在管道内实现弯曲运动,适应不同形状和曲率的管道,以及使得机器人可以灵活地调整自身的形状和姿态,以适应管道内部的特定环境和限制条件,使机器人具有较强的适应性和通用性。无论管道的形状和曲率如何变化,机器人都能够通过调整钢丝的收缩程度来实现所需的曲率变化和相对位置变化。
21、4、本发明通过气泵抽取气体在垃圾收集箱内部形成低气压,利用气压差将油气管道中清理的油污通过吸污嘴收集并储存在垃圾收集箱中,通过利用气压差,将油气管道中清理的油污通过吸污嘴收集。低气压区域的形成使得油污被迅速吸入吸污嘴,并输送到垃圾收集箱中。达到了高效地清理油气管道中的油污的目的,减少环境污染和健康风险,同时减少了对化学溶剂和清洗剂等化学物质的使用。相比传统的清洗方法,这种设计更环保,减少了对环境的负面影响,并且可以方便地进行储存和处理,减少了处理过程中的转移和泄漏风险。
- 还没有人留言评论。精彩留言会获得点赞!