一种清洗机器人的制作方法
本技术涉及光伏清洗,特别涉及一种清洗机器人。
背景技术:
1、目前采用水洗的清洗机器人,其结构为设备前方设置毛刷辊并配有喷淋装置。当清洗机器人工作时,喷淋装置开始喷洒清洗液或水,同时毛刷辊开始滚动,以进行清扫工作。随着清洗机器人工作的进行,大量的水或者清洗液残留在光伏面板(光伏组件)的表面。当光伏面板被暴晒时,残留的液体最后会蒸发成水渍留在光伏面板表面,这会导致热斑效应加剧,增加光伏面板的损坏风险,降低光伏面板的发电效率,影响光伏电站的收益。
技术实现思路
1、本技术为了解决上述问题,提供一种清洗机器人,设计巧妙、结构简单,通过设置擦干组件,可减少光伏面板上残留的水或清洗液,减弱热斑效应,降低光伏面板损坏的风险,增加光伏电站的收益,本技术所采用的技术方案如下:
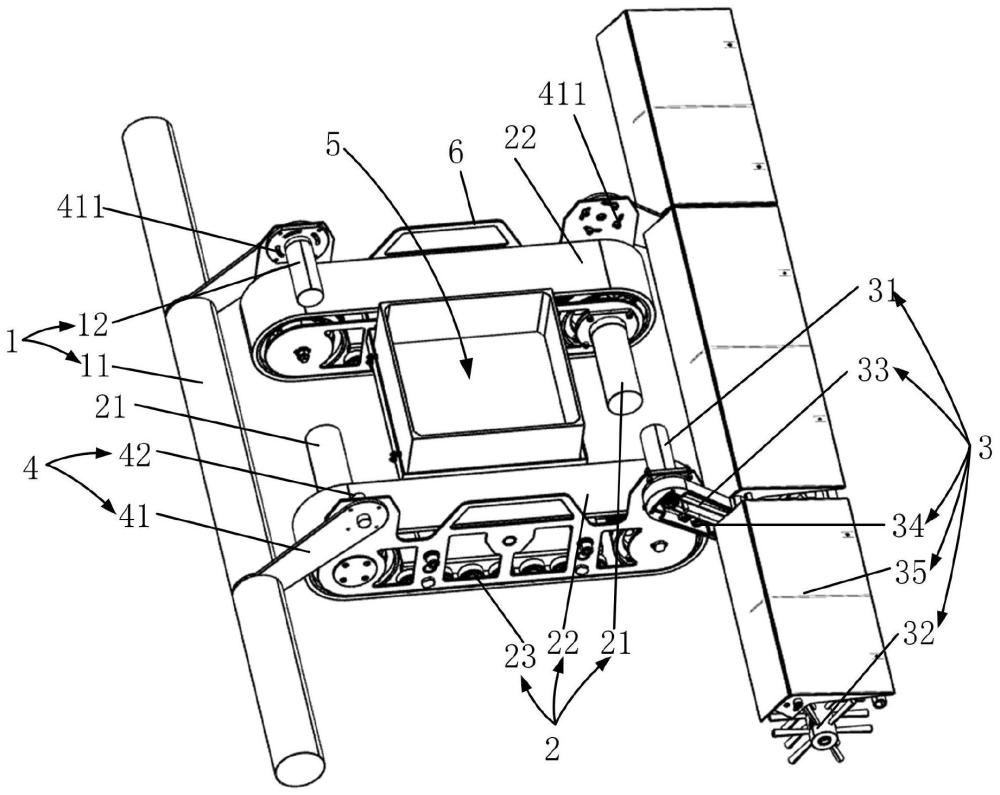
2、一种清洗机器人,包括:
3、底盘支架;
4、行走组件,安装于所述底盘支架,用于带动所述底盘支架移动;
5、清洗组件,安装于所述底盘支架,所述清洗组件利用清洗液清洗光伏面板;
6、擦干组件,安装于所述底盘支架,用于擦干所述光伏面板上的清洗液。
7、通过设置擦干组件,可减少光伏面板上残留的水或清洗液,进而减弱热斑效应,降低光伏面板损坏的风险。增加光伏电站的收益。
8、在一些实施方式中,所述清洗组件和所述擦干组件分别安装于所述底盘支架的行走方向前后两端。
9、通过将清洗组件和所述擦干组件分别设置于所述底盘支架行走方向的前后两端,对底盘支架所受的力进行了合理分配,可使底盘支架前后两端受到的力相互平衡,降低底盘支架前倾或后倾的风险,使得底盘更稳定的在光伏面板上行走,同时也降低了为保障底盘支架的平衡而对底盘支架的配重要求。
10、在一些实施方式中,所述擦干组件包括第一转辊和第一驱动电机,所述第一转辊上设置吸水材料,所述第一驱动电机的输出端与所述第一转辊枢转连接,以驱使所述第一转辊转动。
11、通过第一驱动电机可以控制第一转辊的转速,以便根据光伏面板上残留的清洗液的多少而调整转速。第一转辊上通长设置吸水材料可最大化的保证第一转辊的吸水面积,进而提升擦干效果和擦干效率。
12、在一些实施方式中,所述擦干组件还包括升降组件,所述升降组件用于驱动所述第一转辊的升降,以调整所述第一转辊与所述光伏面板的距离。
13、通过升降组件控制第一转辊的升降,从而调整第一转辊与光伏面板的接触面积和压力,以便控制第一转辊的擦干效果和擦干效率。
14、在一些实施方式中,所述升降组件包括支撑板和减速电机,所述支撑板有两个且分别与所述底盘支架的两侧连接,所述支撑板两端分别转动连接于所述第一转辊和所述底盘支架,所述减速电机可驱动所述支撑板绕所述支撑板与所述底盘支架转动连接处转动。
15、通过减速电机控制支撑板的转动,此种方案的构造简单,占用空间小,不会对清洗机器人有限的空间造成挤占,另外减速电机控制灵敏,可精准控制第一转辊与光伏面板间的距离。
16、在一些实施方式中,所述行走组件包括第二驱动电机和位于所述底盘支架两侧的履带,所述第二驱动电机驱动所述履带转动。
17、通过采用履带,可节省清洗机器人行走系统中的传动组件,进而实现了清洗机器人的减重,减低了清洗机器人在单位时间内能源消耗量,为清洗机器人的作业行程、清洗效率及擦干效率的提升提供了发挥空间;另外,履带与光伏面板的接触面积较大,可将清洗机器人的重量分散传递到光伏面板上,降低光伏面板被压坏的风险。
18、在一些实施方式中,位于所述底盘支架两侧的所述履带分别由相互独立的两个所述第二驱动电机驱动。
19、底盘支架两侧的履带分别由相互独立的所述第二驱动电机驱动,即有两套相互独立的动力系统分别控制对应侧的履带转动,底盘支架两侧履带的转动方向可相同或不同,转动速度也是可相同或不同,通过分别控制两侧履带的转动方向和转速,可实现清洗机器人的转向控制,可实现对光伏面板的反复清洗。
20、在一些实施方式中,所述第二驱动电机安装于所述底盘支架的对角位置。
21、通过将第二驱动电机安装于所述底盘支架的对角位置,可使底盘支架的受力均匀,降低底盘支架偏心受力的风险,提升底盘支架行走的平稳性。
22、在一些实施方式中,所述底盘支架的两侧均设有若干支撑轮,所述支撑轮可随着所述履带的转动而在所述履带轨面上自由滚动。
23、通过设置支撑轮,可使底盘支架的重量均匀的分布到履带上,进而由履带均匀的传递到光伏面板上,使得光伏面板受力均匀。
24、在一些实施方式中,所述清洗组件包括第三驱动电机、毛刷辊及喷射所述清洗液的喷头,所述第三驱动电机通过传动带驱动所述毛刷辊转动。
25、通过第三驱动电机与传动带的配合,控制毛刷辊的转动,一方面传动带重量较轻,传动距离较远,另一方面传动带价格低廉,便于更换,减低了维护费用。
26、本技术提供的一种清洗机器人,至少具有以下有益效果:
27、1、本技术提供的一种清洗机器人,设计巧妙,结构简单,通过设置擦干组件,可减少光伏面板上残留的水或清洗液,进而减弱热斑效应,降低光伏面板损坏的风险。增加光伏电站的收益;
28、2、本技术提供的一种清洗机器人,通过将清洗组件和所述擦干组件分别设置于所述底盘支架行走方向的前后两端,对底盘支架所受的力进行了合理分配,可使底盘支架前后两端受到的力相互平衡,降低底盘支架前倾或后倾的风险,使得底盘更稳定的在光伏面板上行走,同时也降低了为保障底盘支架的平衡而对底盘支架的配重要求;
29、3、本技术提供的一种清洗机器人,通过第一驱动电机可以控制第一转辊的转速,以便根据光伏面板上残留的清洗液的多少而调整转速。第一转辊上通长设置吸水材料可最大化的保证第一转辊的吸水面积,进而提升擦干效果和擦干效率;
30、4、本技术提供的一种清洗机器人,通过升降组件控制第一转辊的升降,从而调整第一转辊与光伏面板的接触面积和压力,以便控制第一转辊的擦干效果和擦干效率;
31、5、本技术提供的一种清洗机器人,通过减速电机控制支撑板的转动,此种方案的构造简单,占用空间小,不会对清洗机器人有限的空间造成挤占,另外减速电机控制灵敏,可精准控制第一转辊与光伏面板间的距离;
32、6、本技术提供的一种清洗机器人,通过采用履带,可节省清洗机器人行走系统中的传动组件,进而实现了清洗机器人的减重,减低了清洗机器人在单位时间内能源消耗量,为清洗机器人的作业行程、清洗效率及擦干效率的提升提供了发挥空间;另外,履带与光伏面板的接触面积较大,可将清洗机器人的重量分散传递到光伏面板上,降低光伏面板被压坏的风险;
33、7、本技术提供的一种清洗机器人,底盘支架两侧的履带分别由相互独立的所述第二驱动电机驱动,即有两套相互独立的动力系统分别控制对应侧的履带转动,底盘支架两侧履带的转动方向可相同或不同,转动速度也是可相同或不同,通过分别控制两侧履带的转动方向和转速,可实现清洗机器人的转向控制,可实现对光伏面板的反复清洗;
34、8、本技术提供的一种清洗机器人,通过将第二驱动电机安装于所述底盘支架的对角位置,可使底盘支架的受力均匀,降低底盘支架偏心受力的风险,提升底盘支架行走的平稳性;
35、9、本技术提供的一种清洗机器人,通过设置支撑轮,可使底盘支架的重量均匀的分布到履带上,进而由履带均匀的传递到光伏面板上,使得光伏面板受力均匀;
36、10、本技术提供的一种清洗机器人,通过第三驱动电机与传动带的配合,控制毛刷辊的转动,一方面传动带重量较轻,传动距离较远,另一方面传动带价格低廉,便于更换,减低了维护费用。
- 还没有人留言评论。精彩留言会获得点赞!