一种槽罐清洗器及其智能控制系统的制作方法
本发明涉及智能控制,特别涉及一种槽罐清洗器及其智能控制系统。
背景技术:
1、在化工、食品和医药等行业中,槽罐内壁的清洁程度直接影响到生产出的产品质量。残留的污垢、细菌或其他杂质可能会导致产品质量下降,甚至产生安全风险。虽然清洗槽罐需要投入一定的成本,但长期来看,通过减少设备故障、提高生产效率和保证产品质量,可以降低整体的运营成本。传统水压驱动清洗器利用水的压力来清洗物体表面,但是内结构复杂,容易死机和损坏,稳定性差。另外,传统水压驱动清洗器的压力调控不灵敏,可调范围小。
2、申请号为:201810721727.7的发明专利公开了一种水射流槽罐清洗装置,其中,水射流槽罐清洗装置包括呈扇叶式分布的清洗框架、支撑整个清洗装置且作为运动件的机械移动件、以及连接清洗框架和机械移动件的防爆电机架。该清洗装置连接外部的控制中心,进而控制清洗框架转动时的环向轨迹,控制清洗框架上的水射流喷头的纵向轨迹,同时清洗装置连接电液供给系统,进而实现对整个储油槽罐内壁的清洗。上述发明设计新颖,节能环保,实用性强,节省了人力,提高了清洗效率,减少了人工作业事故。
3、但是,水射流喷头喷射水流需要喷射驱动装置,喷射水压过大不环保,喷射水压过小清洁不到位,还需要二次清洁,上述清洗装置进行槽罐清洗没有考虑到不同附着物质需要的喷射水压不同,工作效率较低。
4、有鉴于此,亟需一种槽罐清洗器及其智能控制系统,以至少解决上述不足。
技术实现思路
1、本发明目的之一在于提供了一种槽罐清洗器及其智能控制系统,获取槽罐清洗器喷头和目标槽罐的实时的目标距离参数集,同时,获取残留物质估计信息,根据目标距离参数集和残留物质估计信息确定槽罐清洗器适宜的工作参数,根据适宜工作参数进行槽罐清洗器的实时智能控制,极大提高了槽罐清洗作业效率。
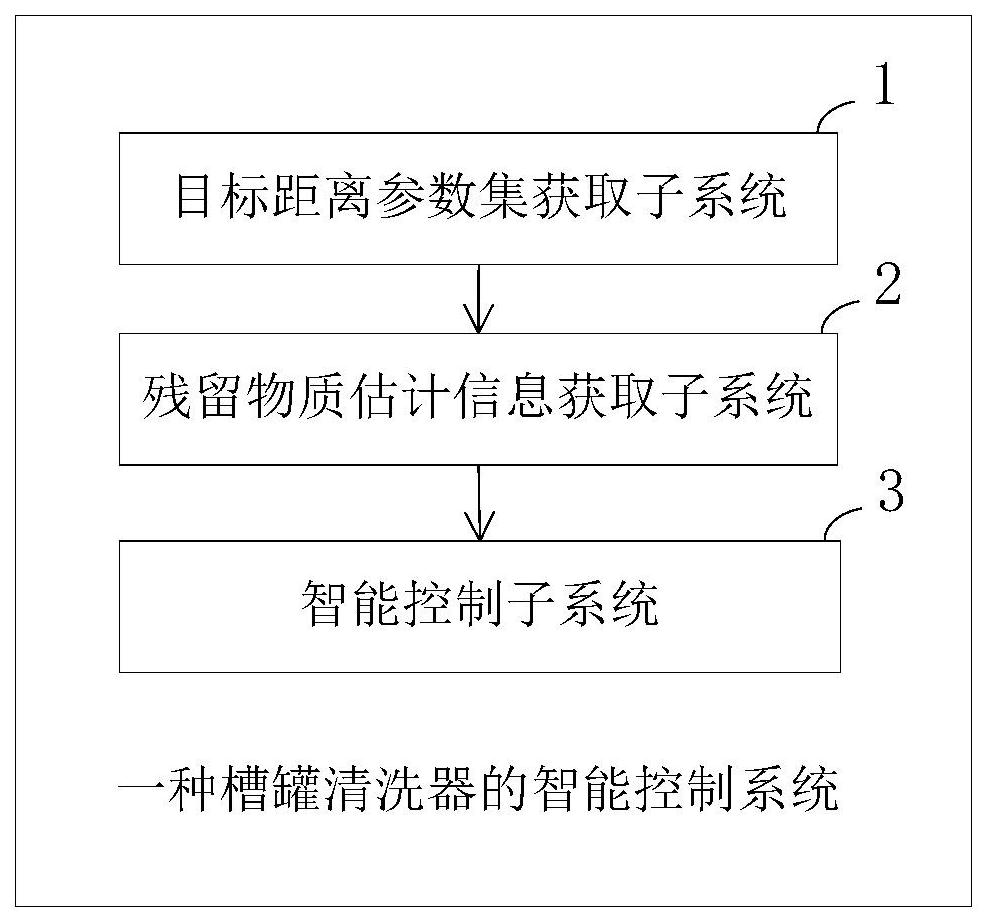
2、本发明实施例提供的一种槽罐清洗器的智能控制系统,包括:
3、目标距离参数集获取子系统,用于获取槽罐清洗器喷头和目标槽罐的目标距离参数集;
4、残留物质估计信息获取子系统,用于获取目标槽罐的残留物质估计信息;
5、智能控制子系统,用于根据目标距离参数集和残留物质估计信息,进行槽罐清洗器的智能控制。
6、优选的,目标距离参数集获取子系统,包括:
7、距离传感器配置信息获取模块,用于获取槽罐清洗器喷头的距离传感器配置信息;
8、配置结果获取模块,用于解析距离传感器配置信息,获取配置结果;
9、目标距离参数集第一确定模块,用于若配置结果为配置成功,根据距离传感器感应信息,确定目标距离参数集;
10、目标距离参数集第二确定模块,用于若配置结果为配置不成功,确定目标槽罐的清洗器位置设置方案,根据目标槽罐的清洗器位置设置方案,确定目标距离参数集。
11、优选的,目标距离参数集第二确定模块,包括:
12、初始距离参数集确定子模块,用于根据清洗器位置设置方案,确定槽罐清洗器喷头和槽罐清洗器内壁的初始距离参数集;
13、目标距离参数集确定子模块,用于根据槽罐清洗器喷头的当前伸缩量和初始距离参数集,确定目标距离参数集。
14、优选的,残留物质估计信息获取子系统,包括:
15、储存信息获取模块,用于获取目标槽罐的储存信息;
16、残留物质估计信息确定模块,用于根据储存信息,确定目标槽罐的罐内物体的残留物质估计信息,残留物质估计信息包括:残留物质种类和残留物质分布。
17、优选的,残留物质估计信息确定模块,包括:
18、目标物质种类集确定子模块,用于根据储存信息,确定目标物质种类集;
19、挂壁分析物质确定子模块,用于依次遍历目标物质种类集中的目标物质种类,将当前正在遍历的目标物质种类对应的目标物质作为挂壁分析物质;
20、挂壁分析模型获取子模块,用于获取挂壁分析物质的挂壁分析模型;
21、罐内结构获取子模块,用于获取目标槽罐的罐内结构;
22、挂壁分析确定子模块,用于根据挂壁分析模型和罐内结构进行挂壁分析物质的挂壁分析,获得挂壁分析结果;
23、残留物质估计信息确定子模块,用于当目标物质种类集中所有的目标物质种类遍历完成后,将所有挂壁分析结果共同作为残留物质估计信息。
24、优选的,智能控制子系统,包括:
25、工作参数信息确定模块,用于根据目标距离参数集和残留物质估计信息,确定槽罐清洗器喷头的工作参数信息,工作参数信息包括:接续伸缩量和目标压力;
26、控制模块,用于根据工作参数信息进行槽罐清洗器的相应控制。
27、优选的,工作参数信息确定模块,包括:
28、当前冲击压力获取子模块,用于获取当前冲击压力;
29、未来目标距离参数集确定子模块,用于根据接续伸缩量和目标距离参数集,确定未来目标距离参数集;
30、底部到达接触压力确定子模块,用于根据当前冲击压力和未来目标距离参数集,确定槽罐清洗器的底部到达接触压力;
31、第一所需冲击压力确定子模块,用于根据残留物质估计信息,确定第一所需冲击压力,第一所需冲击压力包括:槽罐清洗器侧壁所需冲击压力和槽罐清洗器底部所需冲击压力;
32、时间迁移特性获取子模块,用于获取残留物质的时间迁移特性和残留时间;
33、时间迁移特征确定子模块,用于根据时间迁移特性和残留时间,确定残留物质的时间迁移特征;
34、第二所需冲击压力确定子模块,用于根据每一残留物质的时间迁移特征对第一所需冲击压力进行调整,获得第二所需冲击压力;
35、时间迁移压力确定子模块,用于解析第二所需冲击压力,获取调整后的槽罐清洗器底部所需冲击压力;
36、压力差获取子模块,用于将调整后的槽罐清洗器底部所需冲击压力和底部到达接触压力进行对比,获取压力差;
37、工作参数信息确定子模块,用于根据压力差,确定工作参数信息。
38、优选的,工作参数信息确定子模块,包括:
39、工作参数信息第一确定单元,用于若压力差大于0,则增加当前冲击压力,确定工作参数信息;
40、工作参数信息第二确定单元,用于若压力差小于等于0,则减小当前冲击压力,确定工作参数信息。
41、优选的,工作参数信息第一确定单元,包括:
42、底部到达距离确定部,用于根据未来目标距离参数集,确定底部到达距离;
43、目标压力确定部,用于根据底部到达距离和压力差,确定压力增加预期值;
44、第一侧壁预期压力值确定部,用于根据当前冲击压力、压力增加预期值和未来目标距离参数集,确定第一侧壁预期压力值;
45、目标压力第一确定部,用于若第一侧壁预期压力值大于等于槽罐清洗器侧壁所需冲击压力,则根据当前冲击压力和压力增加预期值,确定目标压力;
46、接续压力增加预期值确定部,用于若第一侧壁预期压力值小于槽罐清洗器侧壁所需冲击压力,则根据槽罐清洗器侧壁所需冲击压力、第一侧壁预期压力值和未来目标距离参数集,确定接续压力增加预期值;
47、目标压力第二确定部,用于根据当前冲击压力、压力增加预期值和接续压力增加预期值,确定目标压力。
48、优选的,工作参数信息第二确定单元,包括:
49、压力减少预期值确定部,用于根据压力差和未来目标距离参数集,确定压力减少预期值;
50、第二侧壁预期压力值确定部,用于根据当前冲击压力、压力减少预期值和未来目标距离参数集,确定第二侧壁预期压力值;
51、目标压力第三确定部,用于若第二侧壁预期压力值大于等于槽罐清洗器侧壁所需冲击压力,则根据当前冲击压力和压力减少预期值,确定目标压力;
52、压力减少预期值上调部,用于若第二侧壁预期压力值小于槽罐清洗器侧壁所需冲击压力,则上调压力减少预期值,直至第二侧壁预期压力值等于槽罐清洗器侧壁所需冲击压力;
53、目标压力第四确定部,用于基于当前冲击压力和上调的压力减少预期值,确定目标压力。
54、本发明实施例提供一种槽罐清洗器,运用到任意一项上述的智能控制系统。
55、本发明的有益效果为:
56、本发明获取槽罐清洗器喷头和目标槽罐的实时的目标距离参数集,同时,获取残留物质估计信息,根据目标距离参数集和残留物质估计信息确定槽罐清洗器适宜的工作参数,根据适宜工作参数进行槽罐清洗器的实时智能控制,极大提高了槽罐清洗作业效率。
57、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过本技术文件中所特别指出的结构来实现和获得。
58、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
- 还没有人留言评论。精彩留言会获得点赞!