自主寻踪的交叉式曝气复氧系统及曝气复氧方法
本发明涉及自主寻踪的交叉式曝气复氧系统及曝气复氧方法,属于水处理领域。
背景技术:
1、我国城乡分布有大量的闸控河流、断头浜、湖泊、水塘等封闭、半封闭水体,其水流运动缓慢甚至静止,与外界物质交换能力微弱,污染物往往富集于此,导致水体,尤其是中下层溶解氧(do)量过低,带来水生生物死亡,环境质量恶化,甚至水体黑臭等生态环境问题。
2、针对该类动力弱,do含量低的水体,可通过人工曝气手段来实现水体中下层的复氧。但是传统的曝气大多属于定点曝气,其复氧范围有限,对于一定面积水域则需布设多个曝气点进行复氧,效率相对较低,同时对底泥产生较大冲刷,使底泥中的颗粒物再悬浮,污染物释放进入上覆水体,造成内源污染。当前有专利(一种多功能水体修复双体船装置,公开号:cn106915419a等)提出了人工操控的移动曝气,虽然提高了曝气效率,但是需要人工操控,增加了人工成本;专利(全自动曝气船,公开号:cn114030568a等)提出了巡航式的移动曝气,但巡航式的移动曝气仅能针对提前设计的特定线路曝气,既无法在较大的水体范围内灵活地移动工作,也无法自主寻找最佳的复氧点位;并且,这些已有的曝气方式均未能有效抑制曝气过程对底泥的扰动,不可避免造成内源污染。
3、为此,本发明提出一种避免底泥扰动的自主寻踪交叉式曝气复氧系统与方法,该系统可根据水域缺氧状况,自主判断最优复氧点位,并自动运移至该点位进行交叉射流式曝气复氧,实现了完全自主,无需人工干预的复氧路径识别优化和高效曝气,同时最大化地降低曝气过程对底泥的扰动。
技术实现思路
1、发明目的:为了克服现有技术中存在的不足,本发明提供一种自主寻踪的交叉式曝气复氧系统及曝气复氧方法,在复氧过程中避免曝气对底泥的冲刷扰动,同时减小曝气气泡粒径,增大气泡比表面积,加快do传质速度,有效提升复氧效能。
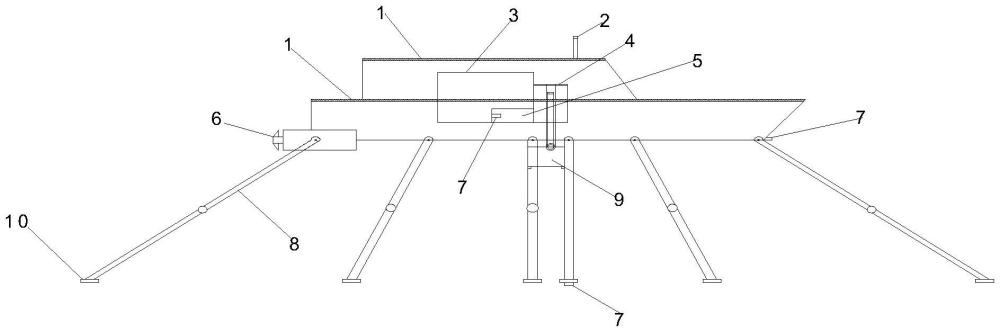
2、技术方案:为解决上述技术问题,本发明的自主寻踪的交叉式曝气复氧系统,包含移动船体,所述移动船体周向均匀分布有溶解氧探测单元,在船体上设有太阳能板和蓄电池;在移动船体的上安装有可升降装置,在可升降装置的端部设有交叉式曝气系统,曝气系统在船体移动时收起,以避免受水草等异物缠绕,阻挡船体有效移动,到达曝气点位时打开进行曝气;在移动船体上设有控制器和船体溶解氧探头,控制器与溶解氧探测单元、船体溶解氧探头、可升降装置和交叉式曝气系统信号连接。
3、作为优选,所述溶解氧探测单元包含伸缩杆和溶解氧探头,溶解氧探头位于伸缩杆的端部。
4、作为优选,所述交叉式曝气系统包含本体,在本体上安装有三个均布的支架单元,在支架单元的顶部安装有曝气管,曝气管与水平面夹角的角度为30°,形成交叉式的射流曝气;曝气口环内壁边缘均匀分布有顶角为30°的等腰三角形锯齿,锯齿高度与曝气口半径的比值为1:10,锯齿厚度与高度的比值为1:4,锯齿间隔为曝气口半径的π/36倍。采用该优选设计,可显著提高曝气气流的紊动耗散率,降低曝气气流及其诱导环境水流运动的动能,同时使得多股曝气气流及其诱导水流之间发生相互碰撞、掺混,有效实现消能,避免对底泥造成扰动冲击,并且减小曝气气泡粒径,增大气泡比表面积,加快溶氧传质速度,有效提升复氧效能。
5、一种自主寻踪的交叉式曝气复氧系统的曝气复氧方法,包括以下步骤:
6、(1)将系统装置放置在水中,连接杆控制8个方向do探头伸出,船体溶解氧探头伸出,检测船体do浓度,设为c0,8个方向do探头所测do值为ci,i=1,2,…,8;
7、(2)若c0低于设定的开始曝气阈值,阈值为水体标准值,则控制器控制交叉式曝气系统下降至一定高度,开始进行交叉式的射流曝气,同时9个探头持续监测探头所在点位的do值,至全部探头监测到的do值稳定在设定的停止曝气阈值以上1h后,停止曝气,控制系统控制电机使曝气系统收起;若c0高于设定的阈值,进入步骤(3);
8、(3)八个方向的溶解氧探头到本点位探头的距离相等且设为l,定义ci对应方向的溶解氧浓度梯度为gi=(c0-ci)/l(i=1,2,…,8),gi最大的方向即最大梯度方向,选为复氧最佳方向;若出现多个g的值相等且最大的情况,则将每个最大g值所对应方向的溶解氧浓度与其两侧探头的溶解氧浓度在该方向的投影进行加和,计算该方向的综合溶解氧浓度指数其中cl、cr分别为ci方向左右两侧的探头测得的do浓度。随后比较各个g最大的方向的i值的大小,其中i最小的方向即复氧最佳方向,若出现多个i值最小且相等的情况,则从最小i值对应的方向中任选一个作为复氧最佳方向;
9、(4)8个方向do探头收起,控制系统控制电机改变涡轮功率,使两侧涡轮产生转速差,船体调转方向,待船体正前方向与复氧最佳方向相同后,控制系统控制涡轮使船体向该方向运动,此时船体do探头持续工作,将数值持续反馈至控制系统;
10、(5)当船体溶解氧探头探测到do浓度低于设定的开始曝气阈值时,涡轮停止运转,控制曝气系统下降至一定高度并开始工作,同时9个探头持续监测探头所在点位的do值,进入步骤(2)和(3)。
11、由于本发明的应用场景是城乡地区湖泊、水塘、断头浜、闸控河流等封闭、半封闭弱动力水体,水流速度缓慢,因此可通过8个方向溶解氧探头测得的溶解氧浓度大小来表征这些方向上的溶解氧浓度梯度的大小。8个方向中溶解氧浓度最低的方向即为复氧最佳方向,若出现两个或两个以上相等的最大梯度的状况,可采用如下过程选取最佳方向:将每个最大梯度所对应方向的溶解氧浓度与其两侧探头的溶解氧浓度在该方向的投影进行加和,计算该方向的综合溶解氧浓度指数其中cl、cr分别为ci方向左右两侧的探头测得的do浓度。随后比较各个梯度最大的方向的i值的大小,其中i最小的方向即复氧最佳方向,若出现多个i值最小且相等的情况,则从最小i值对应的方向中任选一个作为复氧最佳方向。
12、交叉式曝气系统与船体之间通过升降杆连接,曝气系统的移动受控制系统操控,船体停泊工作时被下放到水体中下层实施曝气,曝气完成后自动升起,以免在船体航行时受水草等异物缠绕,阻碍船体移动。曝气口的环内壁边缘,均匀分布有一圈顶角角度为30°的等腰三角形锯齿,锯齿高度与曝气口半径的比值为1:10,锯齿厚度与高度的比值为1:4,锯齿间隔为曝气口半径的π/36倍,提高了曝气气流的紊动耗散率,降低了曝气气流及其诱导环境水流运动的动能。综合水气掺混效果与能源消耗考虑,采用三股交叉流的射流曝气,其中曝气口间距相同,且三股曝气气流交叉于三个曝气口所成等边三角形的形心点所在的竖直线上。通过交叉曝气,形成曝气气流及其诱导水流之间的相互碰撞掺混,对曝气射流进行消能,并减小气泡粒径、增大气泡比表面积,提升曝气系统的复氧效率。
13、为确定实现高效复氧与避免底泥扰动的最优角度,我们构建了交叉曝气水槽模型系统,进行曝气实验。模型水槽矩形水槽长50cm、宽38cm、高48cm,实验水样采样点位于水槽中心线靠近底部位置,采用虹吸方法进行采集。具体实验设计与实验过程详述如下。交叉射流曝气实验三个曝气管出口在同一水平面内且距离相同,使三股曝气气流交叉于三个曝气口所成等边三角形的形心点所在的竖直线上。分别设计0°,15°,30°,45°,60°,75°,90°共7组不同曝气管交叉角度工况的曝气装置,分别置于7个大小相同的水槽进行曝气实验。采用自来水作为实验用上覆水。实验开始前,将处理过的底泥样平铺于实验水槽底部,厚度设置为15cm,底泥表面处理平整后,用虹吸管缓缓注入水深为30cm的自来水,静置两周。而后,将交叉曝气系统浮置于水面,开始持续曝气60min,其中实验曝气射流速度遵循弗汝德相似原则进行概化。曝气结束后,每隔1分钟采用哈希ldotmhq30d溶氧仪测定采样点溶解氧(do)浓度;并采集采样点水样,采用称重法测定水槽水体悬浮颗粒物(ss)浓度,持续检测10分钟。对7组工况测得的do与ss浓度值取时均;以90°工况do与ss时均值为基准,对各角度工况测量结果做无量纲处理,得到不同角度工况下do与ss的相对浓度。结果表明,实验水体do浓度随着气流出口与水平面夹角的变化可分为两个阶段:首先随着夹角的降低而增加,当气流出口与水平面成30°夹角时,do浓度达到最高值,而后处于平稳缓降趋势;实验水体ss浓度随着气流出口与水平面夹角的降低而呈现非线性单调递减规律,当气流出口与水平面成30°夹角时,ss浓度趋近于0,表明曝气对底泥已基本不产生扰动。
14、通过实验研究,我们确定了本发明交叉曝气系统的三个曝气管出口与水平面夹角的最优角度为30°,此时曝气既能够减小气泡粒径,增大气泡比表面积,使溶氧效率达到最高;同时通过气流碰撞与水气掺混,可实现曝气射流的有效消能,同时避免对底泥的冲击与扰动。
15、有益效果:本发明的自主寻踪的交叉式曝气复氧系统的曝气复氧方法,在弱动力水体中实现自主寻找缺氧点位并航行到该区域进行曝气复氧,过程中无需任何人工干预。曝气口边缘锯齿形结构设计能够提高曝气气流的紊动耗散率,降低曝气气流及其诱导环境水流运动的动能,交叉式曝气的方法使得多股曝气气流及其诱导水流之间发生相互碰撞掺混,进而实现有效消能,避免对底泥造成冲击,同时能够减小气泡粒径,增大气泡比表面积,加快传质速度,有效提升溶解复氧效能,相较于微纳米气泡曝气而言更加节省能源,且具备较长的使用寿命,有效降低运行和维护成本,同时能维持较为高效的复氧效率。综合而言,本发明具备自主寻踪、自动化作业、高曝气效能、低成本、环境友好等特点,能够在完全无人值守的情况下实现自主寻踪和避免底泥扰动的移动曝气。
- 还没有人留言评论。精彩留言会获得点赞!