基于图像识别的池内壁清污装置及污垢实时量化分析方法
本发明属于水产养殖智能装备领域,特别涉及一种基于图像识别的池内壁清污装置及污垢实时量化分析方法。
背景技术:
1、水产养殖作为我国水产品重要来源,市场规模在近年来不断扩大,其中淡水养殖占比约为70%。传统水产养殖受制于天气、气候的影响,生产稳定性较差,且人工劳动强度大。同时,由于传统水产养殖一味地追求高产量而忽视对水体的保护,使得水体受到一定程度的污染,水产品质量难保证。为减少对环境的污染,工厂化水产养殖应运而生。工厂化水产养殖通过对物联网技术以及自动投饵、水质监控等装备的应用,成为一种集绿色养殖、高产增殖、高效养殖于一体的高品质养殖模式。
2、工厂化水产养殖一般采用直径在6米以上的圆形池,鱼池内部水体质量和鱼群数量是最需关注的。在养殖一段时间后,诸如微生物、鱼的排泄物、饲料与药物残渣在水里游动,而且池内壁容易积累污垢的问题尤为严重,使池内的水环境变得复杂,影响到养殖水体水质,危害鱼类的健康,更甚会造成鱼类的死亡减产。
3、为了清扫鱼池内壁积累的污垢,且在实际应用中,因为鱼池的直径、曲率半径等参数并不相同,使机器人难以适应不同曲率下的鱼池环境,导致无法彻底清理的问题,开发出一种鱼池内壁清扫污垢机器人,该机器人能够基于图像识别自动清理污垢,达到节约劳动力,提高工作效率的目的;同时该装置能够实时监测鱼池内鱼群生长状态并计数,及时发现池内水质情况。
技术实现思路
1、鉴于此,本发明提出了基于图像识别的池内壁清污装置及污垢实时量化分析方法,可实现对陆基工厂化养殖中大型养殖池的循环清洗,同时可针对养殖池内壁污垢积累程度实现对工厂化陆基养殖池内壁清污装置行进启停、行走速度和工作模块运行速度的控制,从而实现对水环境的管理,同时降低大型养殖池清污所需能耗。
2、为了实现上述目的,本发明一方面,提出了一种基于图像识别的工厂化养殖池内壁清污装置,包括:整机架构,以及布设其上的工作模块、行走机构、限位换向模块、视频监测装置、装置外壳、控制系统;
3、所述整机架构将所述行走机构、工作模块、限位换向模块、视频监测装置和控制系统合理组装;
4、所述工作模块位于所述整机架构前侧,包括用于清除内壁污垢的清污刷、使清污刷紧贴养殖池内壁的自动软仿形机构、带动清污刷完成周期性线性运动的止转轭机构,以及连接各部件的铝管材;
5、所述行走机构包括位于清污装置后侧的仿形橡胶轮、位于清污装置前侧的脚轮以及位于装置内部的万向轮;工作时,所述仿形橡胶轮与池内壁接触,所述脚轮与池外壁接触,所述万向轮沿池上沿滚动;
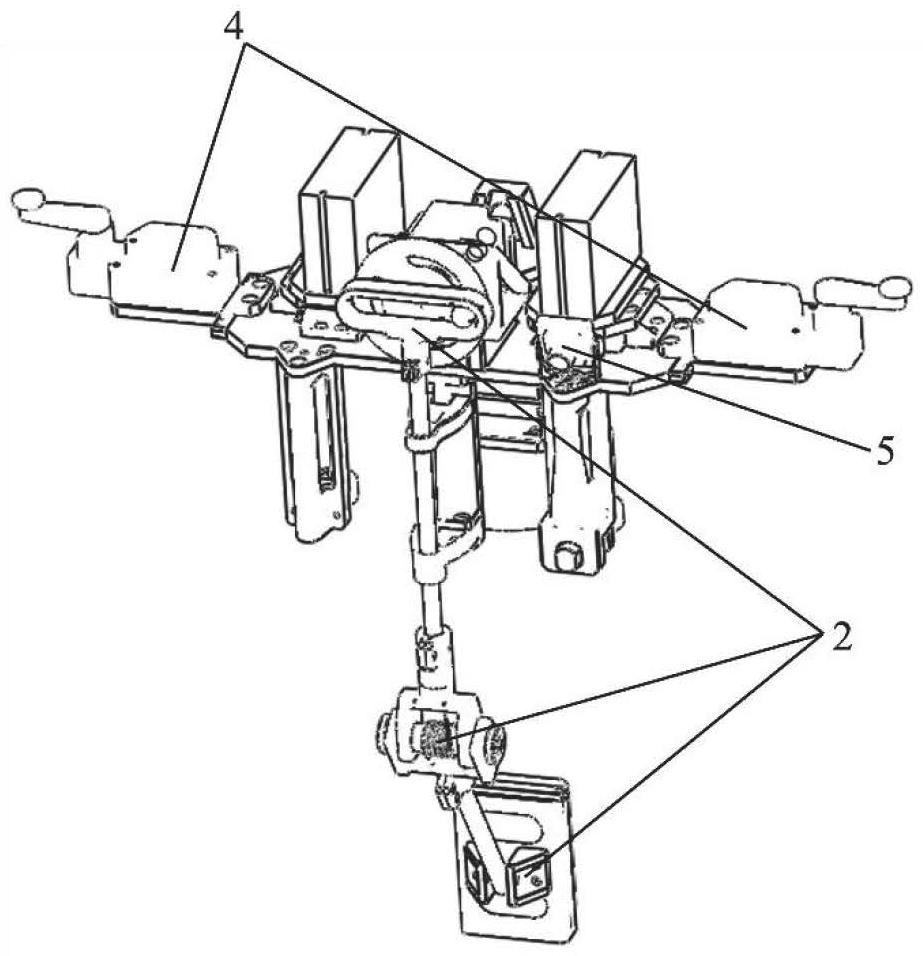
6、所述限位换向模块包括对称布置于所述整机架构两侧的两个限位开关,清污装置到达起止点后,所述限位开关与起止点的障碍物发生干涉,向所述控制系统的单片机发送换向信号,使清污装置沿着路径返回,同时调整所述工作模块的运转方向;
7、所述视频监测装置包括布置于整机架构前侧的摄像头,用于实时获取池内壁的污垢图像信息,并传输至所述控制系统;
8、所述装置外壳将所述整机架构包覆;
9、所述控制系统包括上位机、单片机开发板、两个电机驱动器以及与其对应的两个步进电机;在两个电机驱动机的驱动下两个步进电机分别为所述工作模块中的止转轭机构和所述行走机构的仿形橡胶轮提供动力;所述上位机识别视频监测装置监测的池内壁污垢图像信息,并将图像信息输入上位机的最优预训练模型进行污垢的识别;根据识别出的污垢的严重程度通过单片机开发板对电机驱动器进行控制,带动步进电机的运转,从而控制清污装置的启停、行走速度和所述工作模块的运行速度。
10、优选地,所述整机架构采用对称分布,使清污装置质心靠近对称中心上。
11、优选地,所述上位机置于所述整机架构内部,所述两个电机驱动器对称置于所述整机架构上。
12、优选地,所述脚轮设置有阻尼器,起仿形作用,并实现减震和避障。
13、优选地,所述自动软仿形机构包括两个扭簧和与所述扭簧两侧连接的两个清污刷杆件连接件,所述两个清污刷杆件连接件分别于所述铝管材连接,其中一个扭簧通过清污刷杆件连接件压紧铝管材,为清污刷提供持续压紧力;另一个扭簧通过铝管材与清污刷底座连接,为所述清污刷底座提供贴合养殖池内壁的持续压力。
14、优选地,所述整机架构上设置有导轨和滑块,所述滑块采用螺纹和双螺母紧固,所述滑块在导轨上的滑动来调节橡胶轮与脚轮之间的距离,以使清污装置夹紧养殖池壁。
15、为了实现发明目的,本发明另一方面提出了一种工厂化养殖池内壁污垢积累程度实时量化分析方法,该方法用于对上面所述的一种基于图像识别的工厂化养殖池内壁清污装置识别出的池内壁的污垢积累程度进行实时量化分析,包括:
16、步骤1:采集目标工厂化陆基养殖池的内壁污垢图像;
17、步骤2:使用最大类间方差法求得的阈值对图像进行二值化分割;
18、步骤3:使用labelme工具对采集的图像中的污垢进行边界框标记,并配置唯一id,获取边界框长度、边界框宽度和中心点坐标;
19、步骤4:采用python结合opencv的方法对图像进行固定选择区域的绘制,并将该区域进行横向三等分,作为污垢积累程度定量分析的范围;
20、步骤5:将处理完成后的图像转存png格式;
21、步骤6:使用完成标注和固定区域绘制及等分后的图像制作相应的养殖池内壁污垢数据集,并传入单阶段无锚框深度卷积神经网络模型,通过前向传播及闭环系统更新参数,获取最优预训练模型;
22、步骤7:清污装置绕养殖池空转一圈,摄像头获取养殖池内壁污垢的实时视频信息,逐帧读取并转换为视频流格式,并利用步骤2至步骤5进行处理后,将数据输入步骤6中的最优预训练模型,对养殖池内部污垢积累程度进行定量分析。
23、优选地,所述步骤3中,边界框长度、边界框宽度和中心点坐标具体计算公式如下:
24、
25、
26、s=c×k
27、其中,(xi,yi)为污垢的中心点坐标,(xo,yo)为识别矩形框边界点坐标,c表示识别框的长度,k表示识别框的宽度,s表示矩形框的面积。
28、优选地,所述步骤4中,定义图像是一个大小为m×n的矩阵,其中m是图像的高度(行数),n是图像的宽度(列数);start_point和end_point分别代表污垢积累程度定量分析固定选择区域的两个顶点;为区分污垢识别框和固定选择区域,定义颜色为三元组col,表示蓝色(b)、绿色(g)和红色(r)的值,具体公式如下:
29、
30、start_point=(x1,y1)
31、end_point=(x2,y2)
32、
33、col=(b,g,r)|b,g,r∈[0,255]
34、在图像矩阵i上绘制污垢积累程度定量分析固定选择区域矩形的操作可以表示为
35、
36、
37、随后将绘制的污垢积累程度定量分析固定选择区域三等分并标注为区域a、b和c;其中,t∈z表示边界框厚度。
38、优选地,定义dirt_cul为每三分之一个固定选择区域中污垢积累程度量化指标,sn表示每三分之一个固定区域中污垢识别框和固定选择区域的重叠面积,si表示单个三分之一固定选择区域的面积;对养殖池内壁污垢积累程度进行定量分析的具体公式为:
39、
40、定义三个阈值,阈值1、阈值2和阈值3,当dirt_cul分别超过阈值1、阈值2和阈值3时,认为养殖池内壁污垢积累程度分别达到轻度、中度和重度。
41、本发明所述的技术方案与现有技术相比,具有如下有益效果:
42、(1)本发明的清污装置能够基于图像识别技术的处理结果定量判断养殖池内壁污垢积累程度,以调节行走机构的行进速度和清污刷的工作效率;
43、(2)本发明中的限位换向模块能够通过限位开关发生干涉,改变esp32的特定引脚的电平信号,从而改变行走机构中电机的转向,使清污装置按原路线返回继续清污工作,同时改变止转轭运转方向以减小清污刷的工作阻力;
44、(3)本发明中的整机框架配备的导轨和滑块,用于调节行走机构中的橡胶轮和脚轮,组成曲率自适应装置。该装置能够根据不同池径和壁厚的养殖池而进行调节,保证清污装置能够正常工作,且具有较大的适应范围;
45、(4)本发明整机架构采用对称分布,使装置质心靠近装置对称中心上,提高了工厂化陆基养殖池内壁清污装置的整体稳定性和工作模块的稳定性(工作模块中的清污刷质心点呈现一阶谐波运动,克服了急回效应,同时速度、加速度不出现突变情况);
46、(5)本发明中的自动软仿形机构能够在两处提供不同方向的压紧力,使得清污刷在任何工作时刻均可紧贴养殖池内壁,保障了清污刷能够适应不同池径和壁厚养殖池的清污要求,同时提升了装置的清污能力。
- 还没有人留言评论。精彩留言会获得点赞!