一种四轮独立驱动压力容器酸洗遥控小车及遥控方法
本发明涉及四轮驱动小车,具体涉及一种四轮独立驱动压力容器酸洗遥控小车及遥控方法。
背景技术:
1、压力容器的用途非常广泛,在工业、民用等许多部门以及科学研究的许多领域都具有重要的地位和作用。压力容器大多数由不锈钢制造而成,也因其具有良好的耐腐蚀性能及优越的机械加工性能而应用广泛。在工程中普遍采用酸洗钝化处理的方法,使其具有更佳的耐蚀性能,因此压力容器的酸洗钝化处理是生产中十分重要的一个环节。随着现代化工业的不断发展,压力容器的应用也越来越广泛,酸洗钝化处理也就越来越重要。
2、酸洗的目的是去除氧化皮,常用酸液酸洗和酸膏酸洗两种方法,而酸液酸洗又可分为刷洗和浸洗两种方式,经酸洗钝化后的压力容器表面应呈现出均匀的银白色,且没有明显的锈蚀痕迹。就目前而言,标准的酸洗工艺规范缺乏,且对压力容器酸洗处理的研究报道也较少,因此压力容器的内壁酸洗工作十分困难,若采用人工酸洗的方法不仅将对人的身体造成很大程度的伤害,而且酸洗作业质量得不到保证。
技术实现思路
1、根据现有技术的不足,本发明的目的是提供一种四轮独立驱动压力容器酸洗遥控小车及遥控方法,能够对卧式压力容器的内部进行全方位的酸洗,酸洗效率高且不容易对人身体造成损害,稳定性和安全性更易得到保证。
2、为了解决上述技术问题,本发明采用的技术方案为:
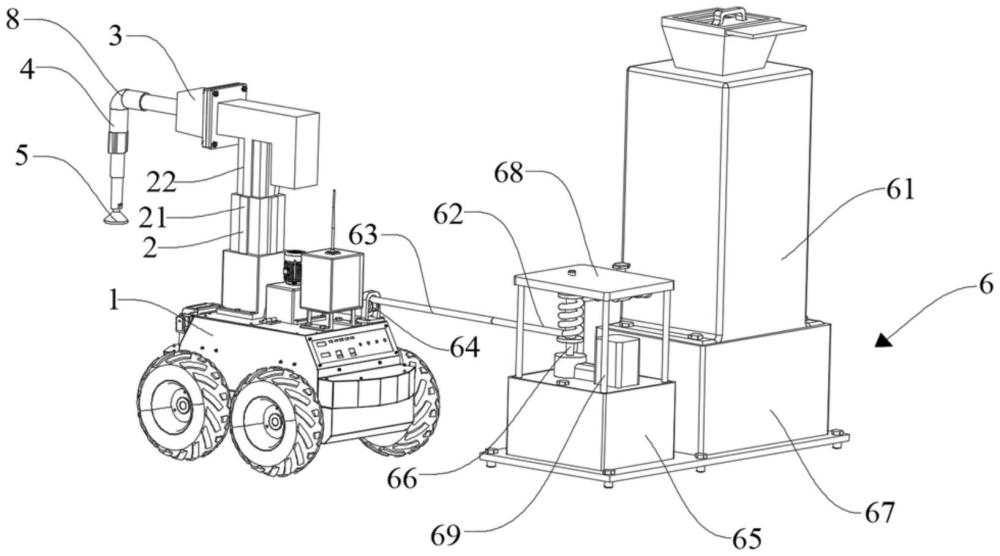
3、一种四轮独立驱动压力容器酸洗遥控小车,包括:
4、四轮驱动小车,所述四轮驱动小车内置imu传感器,通过imu传感器获取四轮驱动小车的位置、速度及姿态;
5、第一机械臂,竖直方向设置在所述四轮驱动小车顶部,且所述第一机械臂通过第一驱动件驱动伸缩;
6、第二机械臂,水平方向设置在所述第一机械臂末端,且所述第二机械臂通过第二驱动件驱动旋转;
7、喷淋伸缩管,设置在所述第二机械臂末端且相对于所述第二机械臂倾斜一定角度;
8、酸洗管,依次穿入所述第一机械臂、所述第二机械臂、所述喷淋伸缩管与所述圆环式花洒喷嘴相连,且所述酸洗管通过酸洗液供给装置提供酸洗液;
9、遥控,所述遥控包括遥控键盘和信号发射模块,所述遥控键盘用于遥控四轮驱动小车运动、遥控第一驱动件驱动第一机械臂伸缩,且遥控第二驱动件驱动第二机械臂旋转,所述信号发射模块用于发射遥控键盘的遥控信号;
10、控制机,所述控制机包括主控机和从控机,所述主控机由信号接收模块、车载显示模块及控制模块组成,所述信号接收模块用于接收遥控信号并将遥控信号发送给控制模块,所述车载显示模块用于显示状态信息,所述控制模块用于基于遥控信号完成相应的指令并获取反馈信号,所述从控机用于监测四轮驱动小车的运动状态且接收反馈信号,以便对四轮驱动小车的运动状态作出适当调整。
11、进一步地,所述酸洗液供给装置包括压力酸液箱、酸洗管、流量控制阀、液位传感器和气压表,所述压力酸液箱内设置有酸洗液,所述酸洗管包括第一输出管道和第二输出管道,所述第一输出管道的一端与所述压力酸液箱相连用于输出酸洗液,所述第一输出管道上设置有流量控制阀用于控制酸洗液的流量大小,所述第一输出管道的另一端与所述第二输出管道相连,所述第二输出管道依次穿入所述第一机械臂、所述第二机械臂、所述喷淋伸缩管与所述圆环式花洒喷嘴相连,所述液位传感器和气压表用于监测压力酸液箱内的液位与压力变化,通过调节压力酸液箱的压力大小控制酸洗液的流速,所述第一机械臂和第二机械臂内部空腔设有多个滑轮,所述第二输出管道与所述滑轮相切且保证接触面间有一定的润滑。
12、进一步地,还包括酸洗管盘放装置,所述酸洗管盘放装置包括第一支撑底座、转轴、第三驱动件和支撑顶板,所述转轴一端转动连接于所述第一支撑底座且通过第三驱动件驱动旋转,所述转轴另一端转动连接于所述支撑顶板,所述支撑顶板设置于所述第一支撑底座上方且与所述第一支撑底座通过连接杆固定连接,所述第一输出管道饶设于所述转轴。
13、进一步地,所述第一机械臂包括第三支撑底座和支撑臂,所述第三支撑底座具有容置支撑臂的空腔,所述支撑臂和所述第三支撑底座滑动连接,所述第三支撑底座上设置有十字形滑动槽,所述支撑臂上设置有与所述十字形滑动槽相匹配的十字形滑动块,所述支撑臂通过第一驱动件驱动相对于所述第三支撑底座伸缩以使所述第一机械臂伸缩。
14、一种四轮独立驱动压力容器酸洗遥控小车的控制方法,应用于上述的四轮独立驱动压力容器酸洗遥控小车,其特征在于,包括以下步骤:
15、启动四轮驱动小车;
16、调整四轮驱动小车的位置,将四轮驱动小车置于卧式压力容器开口端;
17、酸洗液供给装置通过酸洗管对圆环式花洒喷嘴提供酸洗液;
18、遥控第一机械臂伸缩达到预设位置以使设在第一机械臂末端的第二机械臂的几何中心在卧式压力容器的中心轴线上;
19、遥控第二机械臂旋转以使喷淋伸缩管及圆环式花洒喷嘴能够随第二机械臂旋转;
20、遥控四轮驱动小车沿卧式压力容器的轴线方向行驶以对卧式压力容器内壁进行酸洗。
21、进一步地,在第一机械臂顶端凹槽内设置激光传感器,根据imu传感器获取四轮驱动小车的位置和姿态,且基于位置和姿态调整四轮驱动小车使四轮驱动小车处于卧式压力容器开口端,当第一机械臂处于全收缩状态时激光传感器记录并反馈第一机械臂顶端凹槽至卧式压力容器内壁顶端的距离a,设定卧式压力容器内表面半径为距离b,将距离a与b的差值作为第一机械臂将要调整的高度h,调整第一机械臂将升高h以将第一机械臂调整至预设位置。
22、进一步地,所述四轮驱动小车包括驱动轮,在所述四轮驱动小车上设有防抱死系统abs,所述防抱死系统abs包括轮速传感器、制动压力调节器、电子控制单元ecu和abs报警装置,其中,每一驱动轮配有轮速传感器用于获取该驱动轮的速度,制动压力调节器用于调节制动力的大小,电子控制单元ecu通过轮速传感器上传的数据信息计算出驱动轮的运动状态,当四轮驱动小车制动时若驱动轮的滑移率超过一定阈值则认为驱动轮有抱死倾向。
23、进一步地,通过轮速传感器检测到四轮驱动小车行进的速度,在制动的情况下,向制动压力调节器发出指令,通过调整制动液的流速和制动气室气体的压力来调节车辆制动力的大小使驱动轮处于制动和松开的往复循环以改变四轮驱动小车行进的速度。
24、进一步地,通过调节制动压力来控制车辆滑移率在15%-20%,滑移率计算公式为:
25、
26、其中,v表示车速,ω表示驱动轮角速度,r为驱动轮滚动半径。
27、进一步地,通过对轮速v的微分后计算得到驱动轮加速度,再根据四个驱动轮的轮速估算得到整车的参考车速,且通过补偿得到四个驱动轮的参考轮速vref,然后根据不同的工况计算驱动轮的目标滑移率;
28、利用接触模型来模拟瞬态滑移效果且基于松弛长度σcx和环运动计算出驱动轮的滑移速度vcsx,计算公式为:
29、σcζcx+|vcr|ζcx=-vcsx
30、其中,σc为接触区的松弛长度,ζcx为滑移长度,环的直线滚动速度vcr=re(ω+θb),θb为环的扭转运动,ω是轮辋的转动角速度;
31、基于滑移速度vcsx结合pid控制模块得到目标滑移率,然后通过目标滑移率计算驱动轮的目标轮速vtarget,再比较v与vtarget的大小,判断是否需要通过调节制动压力激活滑移率控制。
32、与现有技术相比,本发明具有以下优点和有益效果:
33、本发明提供的四轮独立驱动压力容器酸洗遥控小车及遥控方法,操作方便,结构可靠,酸洗作业均匀,劳动强度低,且有较高的安全性与稳定性。检查四轮驱动小车的状态后,调整四轮驱动小车的位置,将四轮驱动小车置于卧式压力容器开口端;通过酸洗液供给装置对圆环式花洒喷嘴提供酸洗液,遥控第一机械臂伸缩达到预设位置以使设在第一机械臂末端的第二机械臂的几何中心在卧式压力容器的中心轴线上,遥控第二机械臂旋转,使喷淋伸缩管及酸洗管末端的圆环式花洒喷嘴能够相对于第二机械臂旋转,遥控实现四轮驱动小车运动对卧式压力容器的内部进行全方位的酸洗作业。
- 还没有人留言评论。精彩留言会获得点赞!