用于丝印网版清洗的机器人、方法及控制器与流程
本技术涉及智能控制,应用于光伏领域,尤其涉及一种用于丝印网版清洗的机器人、方法及控制器。
背景技术:
1、丝印网版在印刷行业中扮演着至关重要的角色,其清洗效果直接影响印刷质量和生产效率。然而,传统的丝印网版清洗方法存在诸多不足,为解决上述问题,近年来,随着自动化技术的发展,市场上出现了一些半自动化的丝印网版清洗设备,但这些设备在实际应用中仍存在以下不足:
2、1.定位精度不够:现有的半自动化清洗设备往往依赖预设的机械定位装置,难以准确识别不同形状和尺寸的丝印网版。这导致在处理非标准或特殊形状的网版时,清洗效果大打折扣。
3、2.清洗策略单一:半自动化设备通常采用固定的清洗程序,无法根据网版的实际污染情况灵活调整清洗策略。这使得在面对不同污染程度和类型时,清洗效果难以保证,甚至可能损坏网版。
4、3.水资源浪费:尽管一些半自动化设备尝试采用水回收系统,但通常效果不佳。一次性用水仍然是主流,导致大量水资源浪费,增加运行成本和环境负担。
5、因此,亟需一种用于丝印网版清洗的机器人,以解决上述至少一个问题。
技术实现思路
1、本技术提供了一种用于丝印网版清洗的机器人、方法及控制器,旨在解决目前市场上出现的一些半自动化的丝印网版清洗设备仍存在定位精度不够、清洗策略单一、水资源浪费等问题。
2、第一方面,本技术提供了一种用于丝印网版清洗的机器人,包括:
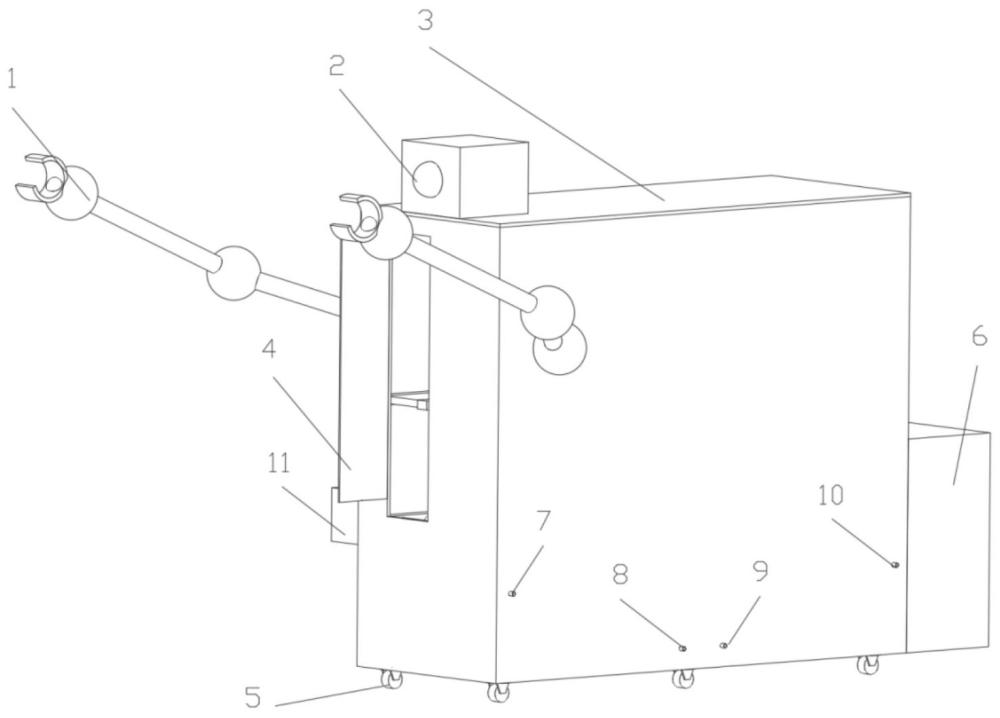
3、箱体,包括第一端面、第二端面和第三端面,所述第一端面和第二端面相对设置,所述第三端面与所述第一端面垂直,所述第三端面上形成有清洗区;
4、两个机械臂,两个所述机械臂相对设置在所述第一端面和所述第二端面上;
5、图像采集模块,设置在所述箱体上,用于采集待清洗网版的网版图像信息;
6、网版控制架,设置于所述清洗区内,用于在所述清洗区内上下移动;
7、网版清洗模块,所述网版清洗模块设置在所述清洗区内且位于所述网版控制架下方;
8、激光扫描模块,所述激光扫描模块设置在所述清洗区内,用于测量所述待清洗网版的尺寸信息;
9、控制器,所述控制器根据所述网版图像信息控制获取网版位置和网版形状,根据所述网版位置和网版形状控制所述机械臂夹取所述待清洗网版并放置在述所述网版清洗模块,控制所述网版控制架固定所述待清洗网版,根据所述尺寸信息和网版图像信息确定清洗参数信息,控制所述网版清洗模块根据所述清洗参数信息完成对所述待清洗网版的清洗。
10、在一些实施例中,还包括:万向轮模块,所述万向轮模块设置于所述箱体的下方;所述控制器在根据所述网版位置和网版形状控制所述机械臂夹取所述待清洗网版之前,先根据网版位置控制所述万向轮模块移动至目标位置。
11、在一些实施例中,所述网版清洗模块包括:移动喷头单元,所述移动喷头单元活动设置于所述清洗区内;网版移动单元,所述网版移动单元设置在所述网版控制架下方;水槽单元,所述水槽单元设置在所述网版移动单元下方,所述水槽单元内放置有清洗液和/或漂洗液,所述水槽单元与所述移动喷头单元连通,所述箱体的第一端面或所述第二端面上形成有与所述水槽单元连通的进水口和出水口;其中,所述控制器用于控制所述机械臂将所述待清洗网版放置在所述网版移动单元上,控制所述移动喷头单元根据所述清洗参数信息完成对所述待清洗网版的清洗。
12、示例性的,所述水槽单元包括:清洗槽和漂洗槽,所述清洗槽和漂洗槽相对设置于所述清洗区内,所述清洗槽内放置有清洗液,所述漂洗槽内放置有漂洗液;所述机器人还包括:控制板,所述控制板设置在所述清洗槽、漂洗槽上,且位于所述网版移动单元下方;所述控制器用于控制所述控制板控制所述网版移动单元在所述待清洗网版在清洗阶段时与清洗槽连通,在漂洗阶段时与所述漂洗槽连通。
13、需要说明的是,在一些实施例中,还包括:感光胶浓度检测器,用于检测所述清洗槽中的清洗液的感光胶浓度;所述控制器用于在所述感光胶浓度大于预设浓度时控制所述清洗槽更换清洗液;和/或,清洗液浓度检测器,用于检测所述漂洗槽中的漂洗液浓度;所述控制器用于在所述漂洗液浓度低于预设浓度时控制所述漂洗槽更换漂洗液。
14、示例性的,还包括:导轨,所述导轨设置在所述清洗区内,所述网版控制架与所述导轨活动连接,以使得所述网版控制架能沿着所述导轨上下移动;竖杆,所述竖杆与所述导轨活动连接于所述清洗区内,所述竖杆能沿着所述导轨上下移动;其中,所述移动喷头单元与所述竖杆活动连接,所述移动喷涂能沿着所述竖杆在所述清洗区内根据所述清洗参数信息左右移动完成对所述待清洗网版的清洗。
15、示例性的,所述网版移动单元包括:横杠和多个滚动轴,多个滚动轴和所述横杠并排设置于所述清洗区内,用于放置所述待清洗网版;在所述待清洗网版的清洗完成后,所述控制器控制所述滚动轴转动将清洗完成的网版送出所述清洗区。
16、在一些实施例中,所述箱体还包括相对所述第三端面设置的第四端面;所述机器人还包括:热风烘干模块,所述烘干模块设置在所述第四端面上并与所述清洗区连通,用于在对所述待清洗网版清洗完成后对清洗完成的网版进行烘干。
17、在一些实施例中,所述控制器根据所述尺寸信息获取网版长度和网版厚度;所述控制器获取所述清洗液的酸碱性信息和网版材料信息,根据所述酸碱性信息和网版材料信息生成预设清洗强度;所述控制器根据所述网版图像信息计算所述网版表面粗糙度标准差和网版平均污染程度;所述控制器根据所述预设清洗强度、网版表面粗糙度标准差、网版平均污染程度、网版长度和网版厚度确定所述清洗参数信息。
18、示例性的,所述清洗参数信息包括水流速度,所述水流速度对应的表达式包括:
19、;
20、其中,为所述水流速度,为待清洗网版的坐标,为在坐标对应的水流速度,为所述网版长度,为所述网版厚度,为在坐标对应的网版平均污染程度, 在坐标对应的网版表面粗糙度标准差,为所述预设清洗强度。
21、第二方面,本技术提供了一种用于丝印网版的清洗方法,应用于如本技术任一实施例所提供的用于丝印网版清洗的机器人的控制器;方法包括:
22、根据所述网版图像信息控制获取网版位置和网版形状;
23、根据所述网版位置和网版形状控制所述机械臂夹取所述待清洗网版并放置在述所述网版清洗模块;
24、控制所述网版控制架固定所述待清洗网版,根据所述尺寸信息和网版图像信息确定清洗参数信息;
25、控制所述网版清洗模块根据所述清洗参数信息完成对所述待清洗网版的清洗。
26、在一些实施例中,所述根据所述尺寸信息和网版图像信息确定清洗参数信息,包括:根据所述尺寸信息获取网版长度和网版厚度;获取所述清洗液的酸碱性信息和网版材料信息;根据所述酸碱性信息和网版材料信息生成预设清洗强度;根据所述网版图像信息计算所述网版表面粗糙度标准差和网版平均污染程度;根据所述预设清洗强度、网版表面粗糙度标准差、网版平均污染程度、网版长度和网版厚度确定所述清洗参数信息;其中,所述清洗参数信息包括水流速度,所述水流速度对应的表达式包括:
27、;
28、其中,为所述水流速度,为待清洗网版的坐标,为在坐标对应的水流速度,为所述网版长度,为所述网版厚度,为在坐标对应的网版平均污染程度, 在坐标对应的网版表面粗糙度标准差,为所述预设清洗强度。
29、第三方面,本技术提供一种控制器,所述控制器包括存储器和处理器,所述存储器用于存储计算机程序,所述处理器,用于执行所述计算机程序并在执行所述计算机程序时实现如本技术任一实施例所提供的用于丝印网版的清洗方法的步骤。
30、第四方面,本技术提供了一种计算机可读存储介质,计算机可读存储介质存储有计算机程序,计算机程序被处理器执行时使处理器实现如应用于如本技术任一实施例所提供的用于丝印网版的清洗方法的步骤。
31、本技术实施例提供的一种用于丝印网版清洗的机器人、方法及控制器,该用于丝印网版清洗的机器人的箱体包括第一端面、第二端面和第三端面,其中第一端面和第二端面相对设置,第三端面与第一端面垂直。第三端面上形成有清洗区,这是机器人进行网版清洗的主要区域。两个机械臂相对设置在第一端面和第二端面上,负责夹取和放置待清洗的丝印网版。图像采集模块设置在箱体上,用于采集待清洗网版的图像信息。这些图像信息将用于后续的网版位置和形状识别。网版控制架设置于清洗区内,能够在清洗区内上下移动,用于固定待清洗网版,确保其在清洗过程中保持稳定。网版清洗模块设置在清洗区内,位于网版控制架下方,负责实际的网版清洗工作。激光扫描模块设置在清洗区内,用于测量待清洗网版的尺寸信息。这些尺寸信息将与图像信息一起用于确定清洗参数。控制器是整个系统的中央处理单元,根据图像采集模块和激光扫描模块获取的数据,进行以下控制:识别网版的位置和形状,控制机械臂夹取并放置网版。通过网版控制架固定网版。根据尺寸信息和图像信息确定清洗参数(如清洗时间、清洗强度等)。控制网版清洗模块按照确定的清洗参数执行清洗任务。
32、进而所提供的机器人至少具有以下有益效果:
33、1.提高定位精度:通过图像采集模块和激光扫描模块的结合,机器人能够精确识别网版的位置和尺寸,从而提高机械臂的夹取和放置精度。这解决了半自动化设备定位精度不足的问题,确保网版在清洗过程中始终处于正确的位置。
34、2.多样的清洗策略:控制器根据网版的图像信息和尺寸信息,能够动态调整清洗参数,实现多种清洗策略。这对于不同形状和尺寸的网版尤为重要,能够确保每块网版都能得到最合适的清洗效果。
35、3.节约水资源:通过精确的尺寸测量和图像分析,控制器可以优化清洗过程,减少不必要的水资源浪费。例如,对于较小的网版,可以调节清洗模块的工作范围,避免整体清洗区域的浪费。
36、4.自动化程度高:该机器人实现了从网版的识别、夹取、固定到清洗的全流程自动化,大大减少了人工操作的需要,提高了工作效率和生产安全性。
37、5.清洗质量提升:由于清洗参数的精确控制和多样的清洗策略,网版的清洗质量得到了显著提升。清洗后的网版更加干净,减少了因清洗不彻底导致的印制质量问题。
38、6.操作简便:通过中央控制器的集成管理,操作人员只需将网版放入清洗区,机器人即可自动完成后续的所有工作,操作简便,降低了操作难度和培训成本。
39、7.维护成本低:高度的自动化设计减少了设备的磨损和故障率,延长了设备的使用寿命,降低了维护成本。
40、8.适应性强:机器人可以适应不同形状和尺寸的丝印网版,具有较高的灵活性和适应性,适用于多种生产环境和需求。
41、综上,该用于丝印网版清洗的机器人通过结合多种传感器和智能控制技术,有效解决了现有半自动化设备在定位精度、清洗策略和水资源利用方面的不足,实现了高效、精准、自动化的网版清洗过程,具有显著的技术优势和实际应用价值。
42、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本技术。
- 还没有人留言评论。精彩留言会获得点赞!