运输系统的制作方法
1.本发明涉及一种系统,该系统包括洁净室、能够在洁净室内移动的运输元件和运输元件的设置在洁净室外的驱动元件,其中运输元件不与驱动元件连接并且仅经由无接触的远程力与驱动元件耦联或者由驱动元件驱动。
背景技术:
2.在大量的洁净室应用中需要用于在洁净室中使用的物体的运输设备。例如,在药品制造领域中,对管形瓶、注射器等进行消毒并置于填充站,以便在那里用医疗产品进行无菌填充并封闭。
3.这些物体通常沿固定的轨道移动,或者由在固定的轨道上移动的移动器/滑块来运输。
4.在此,一个基本方面是:所需的在该处必须例如从洁净室之外向洁净室之内运输或者运转的接口或过渡越少,则洁净室就越佳。相应地,例如当驱动系统需要从洁净室外部进入洁净室中的大量电导线时,使用对过渡、打开或接口具有显著需求的驱动器解决方案就是不利的。
5.因为同时洁净室中的空间非常珍贵,因此不一定将在洁净室内需要显著空间的解决方案纳入考量。一个示例是一系列小型自动驾驶汽车,这些汽车借助电动马达提供动力并且相应地定期在充电站处充电。这或者在洁净室中需要更多的导线或者需要更大的电池质量,这两者都是不利的。
6.出于这些原因,特别地,如下轨道系统是优选的,其中驱动器部分地或完全地位于洁净室外。
7.从de 10 2014 102 630 a1已知一种根据权利要求1的前序部分的示例,所述示例具有固定预设的工艺路线或轨道。
8.然而,在这种系统中,移动的选择尤其是不灵活的,因为洁净室内部的相应的轨道和洁净室外部的相应的轨道必须不同地布设。
技术实现要素:
9.因此,本发明所基于的目的是:提出一种用于洁净室中的物体的运输系统,所述运输系统需要少的开口或者优选地不需要开口,而且允许尽可能灵活地选择移动。
10.该目的通过根据权利要求1的系统并且通过根据权利要求13的运输元件来实现。有利的实施方案是从属权利要求的主题。
11.根据本发明的系统的特征在于:运输元件是单独的元件,尤其与洁净室的底部、顶部、壁和/或其他的部分分开,并且尤其不具有与洁净室的底部、顶部、壁和/或其他部分,和/或其他的元件的沿任何空间方向起作用的形状配合的连接。
12.在此,应将术语“单独的元件”理解为:在与驱动元件没有耦联并且与运输的物体也没有耦联的情况下,运输元件完全不具有与洁净室的一些部分或与其他物体和元件的任
何连接,使得该运输元件必要时在克服与驱动元件的耦联力的情况下可以容易地从洁净室中取出或者在洁净室中移动。非形状配合地连接在此表示:除了与可能运输的物体连接之外,运输元件不与任何其他的连接配对彼此接合。相反,单纯竖放和/或平放在洁净室的一些部分上和/或其他元件上并不是形状配合的连接。同样不排除:被运输的物体具有以一定间隙与其他元件的连接,例如被运输的物体经由软管与其他元件连接。
13.由于运输元件被设计为是单独的元件,因此只要距驱动元件的距离对于所使用的远程力不过大,运输元件就可以在驱动元件适当的移动的情况下在洁净室之外自由地移动。
14.这尤其允许在这样的平面或表面自由移动,该平面或表面平行于驱动元件在其中移动的平面或表面。
15.在此,“远程力”应理解为能够以对于耦联足够的强度穿过洁净室的壁部作用的所有力。对此的示例是磁力、电力和电磁力。
16.在此,优选地,驱动元件和运输元件设置在洁净室的平坦的壁部的两侧。由此,通过驱动元件在洁净室外的相应的移动,运输元件可以在平行于洁净室的壁部的表面中自由移动。
17.在一个优选的变型中,运输元件包括可围绕辊轴线转动的至少一个辊,所述辊用于在洁净室的优选平坦的运行面上移动。在此,辊轴线基本上水平于运行面伸展。因此,只要允许耦联到驱动元件处,运输元件就可以沿着运行面自由地移动,由此可以在至少两个维度上灵活地移动。
18.运输元件的这种辊优选地被设计成是自转向的,特别是通过可转动地支承在转向轴线处而自转向,该转向轴线基本上垂直于运行面。这在技术上尤其也可以类似于将辊设计成是支承在通常的购物车处。由此,实际上,在运行面上的移动的任意改变均是可行的,由此运输元件可以驶过几乎任意的道路。
19.同样地,辊轴线优选地以平行于运行面可位移的方式支承,尤其优选地支承在狭槽中。这在运输元件移动方向反向时是有利的,这是因为于是不需要辊的任何转向或转动,而是代替于此,辊沿着狭槽移动并且运输元件可以沿反向方向行驶。
20.在该变型中,通过适当地选择与驱动元件的耦联力使得借助自转向的辊尤其可以实现无颠簸的移动反向。
21.优选地,在使用支承在狭槽中的自转向的辊的情况下,狭槽和转向轴线被设计成,使得狭槽在交点处与沿着转向轴线延伸且延伸经过转动轴线的线相交,其中狭槽优选地在交点的两侧延伸相同远。这允许进一步减少颠簸进而允许运输元件的尤其迅速和灵活的移动。
22.当然,在其他变型中,还设有没有辊的运输元件。根据本发明,任何如下解决方案都是合适的,只要该解决方案以距驱动元件适当的距离的方式保持运输元件并且同时实现与洁净室的运行面或壁部的小的摩擦。
23.为此,例如也可以考虑通过如下方式产生气垫:即,将运输元件和/或洁净室的优选平坦的运行面构成为,使得至少在运输元件和运行面之间的区域的一部分中可形成气垫。这优选例如通过将空气喷嘴设置在运行面中或设置在其上来构成。运送元件的所属的侧可以相应地来设计,以便提供适当的空气阻力。
24.优选地,运输元件和驱动元件的耦联分别通过在运输元件和驱动元件中的磁性设备来实现。当壁部由本身不对磁力做出反应或不减弱磁力的相应的材料构成时,磁性力和电磁力允许穿过洁净室的壁部的相对良好的耦联。
25.优选地,一个或两个磁性设备优选地包括永磁体。特别地,以霍尔巴赫阵列形式布置的永磁体允许在相对大的距离之上进行良好的耦联,由此洁净室的相应较大的壁厚度是可行的,这原则上可以有利于洁净室的密封。
26.永磁体的使用提供了如下优点:不需要持久供电,这尤其在运输元件的情况下可能会是不利的,这是因为在洁净室中供电会随之产生成本,并且会需要开口。
27.相反,在驱动元件中使用电磁体是完全可以考虑的,这是因为在这种情况下缺点较少。但是,在驱动元件中也优选永磁体。
28.不对驱动元件可以如何移动的方式和方法进行固定预设。优选地,可以考虑允许驱动元件灵活移动的所有可能性,这是因为仅在驱动元件可灵活移动的情况下也才可能最大化地利用运输元件的可能的灵活性。
29.为此尤其考虑:使用十字台、皮带驱动装置、链驱动装置、xts和/或电动马达,或者将驱动元件设置在这样的元件处或与其连接。替选地,驱动元件整体上也可以包括所提及的元件中的相应的元件。
30.例如,借助十字台可以沿一个平面在两个空间方向上完全地控制驱动元件或磁性设备的位置,进而控制运输元件的位置,由此使运输元件在洁净室内部中的任何移动都可以在平行于十字台的平面中进行。
31.但是,同样,驱动元件也可以设置在类似于运输元件的上述变型的类型的车辆处,其中然后在驱动元件中优选设置电动马达,所述电动马达主动地驱动包括驱动元件的车辆的车轮或辊。如果布置有驱动元件的车辆相应地具有用于移动的同样大的平行伸展的表面时,借此同样可以确保运输元件的完整的二维的灵活的移动性。
32.在后一变型中,原则上多个运输元件也可以在同一表面上移动,其中相应的控制是有意义的,该控制避免车辆与驱动元件或运输元件发生碰撞。
33.驱动元件优选地包括至少一个辊,至少一个辊具有与先前关于运输元件所描述的用于在优选平坦的平行运行面上移动的辊相对应的特征,所述平行运行面平行于洁净室的运行面伸展。在此,优选地,驱动元件的至少一个辊的辊轴线基本上水平于该平行运行面。
34.驱动元件优选是单独的元件,并且尤其不具有任何与洁净室的外侧和/或其他部分,和/或其他元件在任意空间方向上起作用的形状配合的连接。这确保驱动元件以及进而的运输元件的灵活的移动性。
35.优选地,驱动元件和/或运输元件被设计成是可脱耦的。这在技术上例如可以通过如下方式来简单地实现:即,可以改变驱动元件距洁净室的距离,例如通过驱动元件处于其上的可移动平台,或者简单地通过使驱动元件从洁净室移走来实现。
36.但是,也可以考虑的是:在洁净室中设置如下设备,借助该设备可以增大运送元件至驱动元件的间距,从而实现脱耦。例如,可以考虑在洁净室中设置可升高或可降低的区域(用于移动运输元件以脱耦)和/或在洁净室之外设置可升高或可降低的区域(用于移动驱动元件以脱耦)。
37.这也可以简单地通过洁净室中的壁的相应的斜坡或加厚来实现。一方面,这可以
设计成,使得附加地提高远程力,以允许运输元件例如沿斜坡行进到平台上。为此,例如可以接通或切断设置在洁净室壁部或驱动元件中的附加的电磁体。替代地,也可以相邻于实际的驱动元件安置另一驱动元件,以便增加远程力。
38.但是,也可以在没有相应辅助手段的情况下使用斜坡或加厚。因此,通过运输元件在行进到斜坡上时以足够的速度刚好通过自身的移动足够克服远程力,以至于其对于脱耦在斜坡/加厚处行进足够远。然后,在运输元件例如再次回滚之前,驱动元件可以被移开。如果随后将驱动元件再次移动至运输元件,则会自动发生新的耦联。
39.用于以其他方式使运输元件或驱动元件彼此配对的这些不同的方法变形是有利的,这是因为不同的运输元件可能具有不同的特性(例如布置在其上的其他元件,比如其他大小的固持装置),或对速度、加速度做出其他的反应,又或者通常地在具有其他的形状的情况下则行进范围也不同。
40.相反,例如如果其他的加速力或最大速度对于不同的任务是有利的,则其他驱动元件也可以耦联到运输元件处。
41.特别地,该系统还可以包括相应标准化的耦联/脱耦站,使得可选择的驱动元件和/或可选择的运输元件可以分别彼此耦联。
42.由此,通过将各适合于工作流程的运输元件(例如具有相应的固持装置)耦联到驱动元件处、实施相应的工作流程并且随后进行与其他的适合于下一工作流程的运输元件耦联的方式,可以在同一洁净室中实现不同的工作流程。
43.在根据本发明的系统中,还可以设置成:不设置用于移动驱动元件的具体设备。而是例如手动地或通过通常的工具或通常的机器来移动驱动元件。在最简单的情况下,例如手动地移动驱动元件。
44.同样地,可以设置用于移动该或一驱动元件的设备,并且同时在未提供用于移动的设备的情况下,设置驱动元件与该和/或另一驱动元件的脱耦。
45.借此,例如对于正常运行而言,驱动元件进而运输元件可以借助于用于移动的设备来移动。相反,在例如运输元件必须移动到非寻常的位置处的特定情况下,可以手动地实施移动,以便借助运输装置达到由用于移动的设备而无法达到的位置。
46.还需强调的是,在运输元件和驱动元件之间不强制性必须是洁净室的底部并且不强制性地是平坦的面。因此,运输元件也可以设置在洁净室的侧壁处或也可以设置在洁净室的上壁处,使得例如运输元件在不形成洁净室底部的内壁处移动。洁净室的角区域或边缘区域也可以被设计成,使得在壁之间存在弯曲的过渡,以至于例如运输元件能够从底部行进到侧壁上。
47.运输元件尤其还可以特别是在上侧配设有不同的待运输物体或元件,例如夹钳、容纳件、滑动件、抓具等。
48.例如,具有壳状的容纳件的运输元件可以用于将塞子等从供应站运输直至使用地点。相对于否则为此常用的振动板,这提供了洁净室质量的改进,这是因为振动板产生颗粒。
49.尽管在具有夹钳或抓具的运输元件的情况下,该运输元件可以包括小电池和用于操作抓具的马达,但是用于夹钳、抓具等的如下解决方案是优选的,其中不必将电池等设置在运输元件处。
50.这可以例如通过如下方式实现:即,将多个运输元件与夹钳的相应的操作端部连接。借此,可以经由运输元件彼此间的相对运动来控制:夹钳的另一端部是否被打开或闭合,而运输元件的共同的移动会改变夹钳的位置。
51.原则上,有利地可以为复杂的流程/操作使用多个运输元件。因此,例如可以通过可转动地固持在两个运输元件处的杆或臂以及两个运输元件的臂之间的连接杆/臂构成可升高和降低的固持装置。
52.这是因为运输元件彼此分开移动,所以运输元件的臂与连接臂形成越来越平的角,使得该连接臂越来越靠近运输元件在其上移动的表面。
53.如果运输元件再次朝彼此移动,则当运输元件的两个臂垂直于该表面延伸时,连接臂超过该表面被升高直至最大高度。
54.以这种方式,可以通过多个协调移动的运输元件来运行大量复杂的工具/机构,而无需在洁净室中设置驱动,其中这些运输元件经由相应的元件连接/共同作用。
55.特别地,也可以形成并操作夹钳或抓具装置,该夹钳或抓具设备可以立即抓持多个物体,例如管形瓶。
56.通过在运输元件处设设置滑动件也可以实现进一步的应用。根据需要,滑动件可以借助于运输元件的移动来使其他物体位移或者也阻挡移动路径,例如在例如传送带的交叉处阻挡移动路径,或者将材料/物体偏转到特定区域中。
57.同样地,原则上,可以将任何喷嘴、喷头、封闭机构等作为待运输的物体设置在运输元件上,由此其移动可能是由软管或类似的材料供应器引起的游隙而形成的。借此,例如可以简单地构成可移动的喷头。
58.在洁净室内使用工具/替换元件/等时,得到另一应用优点。在洁净室较大的情况下,出现:仅可以在特定部位处经由闸门引入工具/更换元件/等的情况。如果在其他部位处需要工具/更换元件/等,则必须将其费力地由固定地安装在壁部中的无菌手套传递至无菌手套,直至传递至相应的部位。
59.相反,如果可以在闸门处将工具/替换元件/等置于运输元件的容纳件中,则所述工具/替换元件/等可以精确地且灵活地行进直至使用地点,在该处随后可以借助最近的无菌手套来握持工具/替换元件/等并且能够使用。
60.同样地,还可以将其位置应当是可校准的元件固定在一个或多个运输元件处,以便实现校准。例如,根据刚好使用何种计量方法并且容器的满度如何,调节计量容器的位置是有意义的。特别地,可以借助于相应的运输元件的相对移动也斜置计量容器,这可以使预留在容器中的不可使用的剩余量最小化。
61.此外,在本发明的意义中,在洁净室内仅可理解为:某物处于具有相应的洁净室特性的体积之内。因此,非洁净室元件可以延伸进入洁净室壳体内或洁净室壳体的内部中,该非洁净室元件容置驱动元件。
62.如果其例如具有两个长形的、在两侧通过半圆形的倒圆作为形状连接的平面,则运输元件可以在一个长形平面上沿一个方向行进,在第一倒圆处翻转,并且在另一长形平面上沿相反的方向行进,以便在第二倒圆之后再次到达初始位置。借此,借助于运输元件构成一种传送带。这种非洁净室元件也可以完全地在洁净室之内延伸,这是因为为内置的驱动元件供应能量的线缆连接就足够了。
63.同样地,例如也可以考虑:对计量容器配设有位于洁净室中的运输元件和位于非洁净室中的驱动元件,以便例如借助于计量容器中的磁性桨叶和运输元件的移动为了搅透液体而使浆液在计量容器中移动。在此,必要时,必须将附加的磁体安置在运输元件处,以耦联到桨叶上。
64.根据本发明的目的还通过一种运输元件来实现,该运输元件具有可围绕辊轴线转动的至少一个辊,其中运输元件包括磁性设备,以磁性耦联到驱动元件处,其中运输元件的至少一个辊是自转向的。这优选通过可转动地支承在转向轴线处来自转向,该转向轴线基本上垂直于移动平面。
65.设置在洁净室的壁部上的这种运输元件可以灵活地移动,只要例如通过如下方式施加适当的磁力即可:即将相应的驱动元件设置在洁净室的壁部的另一侧上和/或将相应的设备设置在壁部的内部中,以便能够灵活地改变作用于驱动元件的磁力。
66.根据本发明的运输元件也能够分别对应于之前关于运输元件所描述的特性来设计。
67.同样地,根据本发明的运输元件不仅可以在根据本发明的系统中使用,而且也可以借助于位于洁净室中的驱动元件使用。借此,尽管会导致关于洁净室质量方面的缺点,但是也能够在洁净室的无法考虑设置非洁净室元件部位处实现复杂的移动流程。
附图说明
68.下面,参考附图从上述多个实施例或优选的实施方式中说明多个具体的实施例。
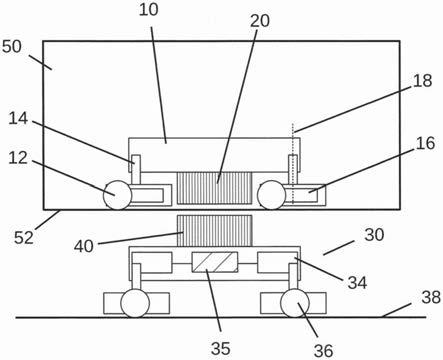
69.图1示出根据本发明的系统的示意侧视图,其包括洁净室、布置在洁净室外的驱动元件和布置在洁净室内的根据本发明的运输元件。
70.图2示出根据本发明的运输元件作为根据本发明的系统的一部分的示意性立体图,其中与图1中不同,驱动元件是十字台。
71.图3a至图3c从下方示出磁性设备之内的磁体的不同布置的示意图。
具体实施方式
72.根据本发明的运输元件10包括多个辊12,例如四个辊,所述辊通过支承在垂直于移动平面的转向轴线14而是自转向的。
73.如果以足够的挤压压力将辊12压靠在相应的运行面,则通过将辊12的辊轴线支承在平行于移动平面的狭槽16中,可以无颠簸地使运输元件10的移动方向反向。
74.在此,狭槽16与假想的线18的延长相交,该线居中地伸展穿过转向轴线14。通过狭槽16在与该线18的交点的两侧延伸相同远的方式,具有保持相同的行进表现的完整的移动反转是可行的。
75.在其他变型中,狭槽16也可以在两侧延伸不同的长度,或者也可以根本不与线18相交。这些不同的可设想的变型对运动方向的不同变化做出不同反应,并且可对应于运动方向的最频繁出现的变化来选择。因此,如果运输元件10具有优选的前向方向并且狭槽16主要应用于在运动方向快速且强烈变化的情况下确保无颠簸地带动辊,则例如没有狭槽16与线18相交的变型是有利的。
76.在附图中未示出:运输元件10还具有其他的通常设置在上侧的元件,该元件用于
与待运输的且待驱动的元件接合。例如,这可以是容器,固持装置,抓具等,但是也可以是简单的滑动件,该滑动件从运输元件10的上侧垂直地或以适当的方式成角度地延伸。
77.根据本发明的运输元件10还包括磁性设备20,以借助于无接触的远程力耦联到驱动元件30处。
78.根据本发明的系统包括根据本发明的运输元件10、洁净室50和驱动元件30。
79.在图1所示的示例中,运输元件10设置在洁净室50的壁部52上,由此该壁部52用作运输元件10的运行面52。
80.驱动元件30设置在壁部52的相对置的侧上,驱动元件包括用于耦联到运输元件10的磁性设备20的磁性设备40。在此,两个磁性设备20和40分别设置在运输元件10和驱动元件30处,使得两者之间的间距相对小,这是因为由此耦联最大或者相应地需要更弱的磁性设备20、40,以便实现足够的耦联。理想地,磁性设备20或磁性设备40和壁部52之间的间距如运输元件10和驱动元件30的移动精度和制造公差所允许的那样最小,使得刚好不造成磁性设备20、40和壁部52之间的接触。这自然也能够取决于:运输元件10是否负载附加的重量,例如由于运输元件相应地运输或移动重物体。
81.在此,在图1所示的变型中,驱动元件30构成为自动驾驶车辆,并且相应地包括电动马达34、转向/控制装置35和可借助于电动马达34驱动和转动的辊36,辊在平行于壁部52伸展的平行运行面38上移动。
82.由此,运输元件10可以完全地沿两个方向在运行面52上移动,而不需要开口和/或在运输元件10处不需要复杂的驱动系统。
83.所示的尺寸当然仅是示意性的,并且在实际应用情况中,运行面52和平行运行面38分别可以设计成尺寸为,使得多个运输元件10和与其耦联的驱动元件30在根据本发明的系统中移动。于是,当然需要相应的控制装置,控制装置适当地将驱动元件30的移动相互协调。
84.此外,驱动元件30还具有可在未示出的充电站中充电的蓄能池等。因为驱动元件30在洁净室50的外部,则充电站的所需的附加的尺寸和空间对于洁净室50的结构和成本而言微不足道。
85.也可以在运行面38中设置有例如呈升降机形式的脱耦区域,通过脱耦区域将驱动元件30向下移动远离,由此由于距离增加而终止到所属的运输元件10的耦联。
86.根据本发明的系统的总体优点在于:根据本发明的运输元件10可以简单地从洁净室中提取,可以对运行面52进行消毒和清洁,并且可以对运输元件10进行维修和更换。
87.图2中示出驱动元件30的替选结构。在所示的实施方式中,驱动元件构成为十字台32,磁性设备40设置在十字台上。十字台32允许特别精确地控制移动,并且与之相应地,系统在图2中在运输元件10移动时具有更高的精度。然而,通常,仅以匹配于所属的运输元件10的移动区域的方式设置十字台32,使得多个运输元件10同时在相同区域中移动是不可行的。
88.在图2的示意图中,仅示出洁净室50的一个壁元件52,并且磁性设备40和壁元件52的下侧之间的间距被示出为比实际更大。
89.可以看出:在图2的变型中,根据本发明的运输元件10与在图1的变型中基本上相同地构造。这尤其意味着:根据本发明的运输元件10根据计划的应用可以与不同的驱动元
件30耦联,使得可以在每种情况下选择针对该应用的最佳的驱动元件30。特别地,可以将另一运输元件30设置在具有根据本发明的运输元件10的洁净室50处,所述洁净室没有洁净室50的开口,这显著地提高了灵活性,这是因为原则上可以为不同的方法流程使用直接彼此相随的不同的驱动元件。
90.在图3a至3c中,示出磁性器件20作为霍尔巴赫阵列的不同的实施方案。在此,观察方向从下方、即从壁部52之下进入洁净室50中。
91.如图3a至3c所示,在霍尔巴赫阵列中,具有不同磁极方向的磁体26、特别是永磁体26彼此相邻地设置。
92.在此,在图3a中,正极27和负极28在图中顶部一排的中央磁体中被定向成,使得连接线与运行面52正交。为此,相邻的磁体26具有旋转90
°
的磁体方向或磁极方向,使得相邻的磁体26的正极27分别朝中央磁体定向。于是,在该行的端部处分别存在磁体26,其具有与在中央磁体26相反的正极27和负极28,进而也具有关于相邻磁体26转动90
°
的磁极方向。
93.尽管这种行可以单独构成磁性设备20。然而,有利的是,错开地构成另一行磁体26,该磁体的正极27和负极28分别与图4a中设置在上方的行相比反向。这优化了磁场力,进而优化了导向精度。
94.磁体26的行也可以比五个磁体更长,其中相邻的磁体各自具有彼此转动90
°
的磁极方向。此外,也可以使用多于两行。这基本上取决于所使用的磁体26的尺寸以及运输元件10和待移动的物体以及磁性设备20的尺寸。
95.图3b中还示出如下选项,其中,行借助于又相对于邻居转动90
°
的磁体26连接,并且构成磁体26的网格。该网格又可以包括比所示出的2或3更多的行和列。
96.尽管两个相邻的磁体26之间的各90
°
的转动角通常是优选的。但是,在特定尺寸、间距和磁体类型的情况下,其他的角度也可以是有利的。
97.一个示例是图3c中示出的磁体26的网格,其中相邻的磁体分别交替地转动45
°
和135
°
。
98.甚至不必到处都总是存在相同的转动角,而是也可以考虑成排的或者成网格的磁体26,其中转动角各为45
°
,使得经由五个磁体26代替所示出的3个磁体使磁极方向完全转动180
°
。此外,也可以考虑各个变化的转动角,该转动角在相应的行或列的端部处得到总共180
°
的数倍的转动角。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1