一种飞行点胶方法及飞行点胶设备与流程
[0001]
本发明涉及制造业中的喷胶技术领域,特别是涉及一种飞行点胶方法及飞行点胶设备。
背景技术:
[0002]
喷胶技术:运动系统将喷头移动到施胶位置,停止运动,喷胶、然后再次移动到下一个喷胶位置,或者带有视觉引导的功能,工作方法为,运动到视觉位置,停止,拍照,定位计算喷胶位置,运动系统将喷胶装置移动到喷胶位置,喷胶。
[0003]
目前,传统的视觉喷胶设备的视觉和喷胶步骤为:视觉装置移动到待喷胶点位停留并拍照,定位好待喷胶点位,喷胶装置移动到喷胶点位并喷胶。这种工作方式有大部分的时间要分配给视觉相机停留和拍照,生产效率较低,不利于高速工作。
技术实现要素:
[0004]
本发明要解决的技术问题是提供一种飞行点胶方法及飞行点胶设备。
[0005]
为实现上述目的,本发明采用的技术方案具体如下:
[0006]
一种飞行点胶方法,其中,飞行视觉装置在运动中对基材上的待喷胶位置进行识别定位,并计算得到运动装置喷胶到达位置;运动装置根据待喷胶位置和喷胶装置当前位置的距离s1计算所需运动速度v1和时间t1;喷胶装置在运动途中准备胶水并计算提前喷胶时间t2,t2为从触发喷胶装置至胶点落到基材上的时间;喷胶装置运动到喷胶装置提前触发位置,即s1-v1
×
t2,触发喷胶装置将胶喷出。
[0007]
其中,飞行视觉装置移动到目标位置后,对喷胶位置进行定位,将定位信息反馈给运动装置进行计算得到最终喷胶位置,喷胶装置根据运行速度和距离待喷胶位置距离提前触发喷胶,使得喷胶装置喷出的胶点落到最终喷胶位置。
[0008]
其中,待喷胶位置为提前设置好的喷胶位置坐标,或者飞行视觉装置定位好的喷胶位置坐标。
[0009]
其中,飞行视觉装置和喷胶装置逐行进行视觉定位和喷胶,且飞行视觉装置和喷胶装置在相邻的行之间作“z”字形运动。
[0010]
进一步的,本发明的飞行点胶方法,可以包括以下步骤:
[0011]
(1)飞行视觉装置到达第一行初始待喷胶位置a1,喷胶视觉定位a1位置;飞行视觉装置将a1位置反馈给运动系统进行计算得到喷胶装置提前触发位置k1;
[0012]
(2)飞行视觉装置继续从左向右行进,依次定位a2、a3…
a
n
等位置;
[0013]
(3)飞行视觉装置将a2、a3、
…
a
n
位置反馈给运动系统进行计算得到喷胶装置提前触发位置k2、k3、
…
kn;
[0014]
(4)喷胶系统到达待喷胶位置k1时,喷胶装置喷胶;同时飞行视觉装置定位a
n+1
;
[0015]
(5)喷胶系统到达待喷胶位置k2时,喷胶装置喷胶;同时飞行视觉装置定位a
n+2
;
[0016]
(6)直到视觉装置定位a
m
,k
m-n
喷胶完成;
[0017]
(7)喷胶系统运动到k
m-n+1
,喷胶;
[0018]
(8)喷胶系统运动到k
m-n+2
,喷胶;
[0019]
(9)重复步骤7-8直达到k
m
喷胶结束;
[0020]
(10)飞行视觉装置重复以上动作,完成b1到b
m
的喷胶操作;
[0021]
重复以上步骤,直至整个工件喷胶完成。
[0022]
其中,a1~a
m
的路线与b1~b
m
的路线呈“z”字形。
[0023]
本发明的飞行点胶设备,包括设备框架、运动装置、喷胶装置、飞行视觉装置;设备框架上装有运动装置,喷胶装置和飞行视觉装置装在运动装置上。
[0024]
其中,所述运动装置包括xy轴,两个轴相互垂直,一个轴驱动飞行视觉装置和喷胶装置,另一个轴驱动待喷胶物料。
[0025]
其中,所述运动装置的驱动电机为直线电机、伺服电机或者步进电机;
[0026]
其中,采用龙门架构安装飞行视觉装置和喷胶装置;
[0027]
其中,所述飞行视觉装置可对喷胶位置定位反馈给运动装置进行位置偏移补偿。
[0028]
其中,飞行视觉装置上设有1个相机,位于喷胶装置一侧。
[0029]
或者,飞行视觉装置上设有2个相机,两个相机位于喷胶装置一侧或两侧。这样可以走“己”字形路线。在走相邻路线时分别启用不同的相机。与“z”字形路线相比,可以节省飞行路径。
[0030]
其中,喷胶装置和飞行视觉装置的间距为l,同一行待喷胶的相邻两点间距为b,l=n
×
b,n为正整数。
[0031]
同现有技术相比,本发明的突出效果在于:
[0032]
本发明是在物体运动过程中进行拍照,并得到物体拍照瞬间的位置、姿态的动作,即飞行拍照。通过飞行拍照有效地减少设备停顿动作,提升生产效率。本发明采用飞行拍照技术进行工件高速喷胶,可极大地提高生产效率,并保证较高的喷胶质量。
[0033]
本发明的飞行视觉装置在飞行中定位待喷胶位置,喷胶装置在到达喷胶位置前准备胶,喷胶速度更快。“z”字形走位使飞行视觉装置和喷胶装置移动距离小,自动纠偏效果好,生产效率高。
[0034]
下面结合附图说明和具体实施例对本发明的飞行点胶方法及飞行点胶设备作进一步说明。
附图说明
[0035]
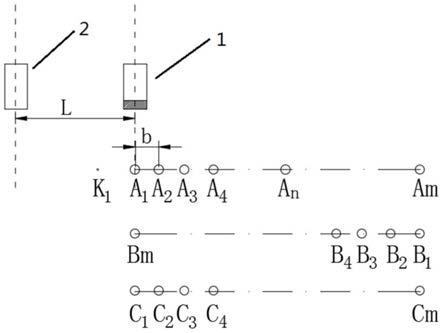
图1为实施例1中飞行点胶路径的示意图;
[0036]
图2为实施例1中运动原理示意图;
[0037]
图3为本发明的飞行点胶设备的示意图。
具体实施方式
[0038]
如图1所示,一种飞行点胶方法,包括以下步骤:
[0039]
(1)飞行视觉装置到达第一行初始待喷胶位置a1,喷胶视觉定位a1位置;飞行视觉装置将a1位置反馈给运动系统进行计算得到喷胶装置提前触发位置k1;
[0040]
(2)飞行视觉装置继续从左向右行进,依次定位a2、a3…
a
n
等位置;
[0041]
(3)飞行视觉装置将a2、a3、
…
a
n
位置反馈给运动系统进行计算得到喷胶装置提前触发位置k2、k3、
…
kn;
[0042]
(4)喷胶系统到达待喷胶位置k1时,喷胶装置喷胶;同时飞行视觉装置定位a
n+1
;
[0043]
(5)喷胶系统到达待喷胶位置k2时,喷胶装置喷胶;同时飞行视觉装置定位a
n+2
;
[0044]
(6)直到视觉装置定位a
m
,k
n
喷胶完成;
[0045]
(7)喷胶系统运动到k
m-n+1
,喷胶;
[0046]
(8)喷胶系统运动到k
m-n+2
,喷胶;
[0047]
(9)重复步骤7-8直达到k
m
喷胶结束;
[0048]
(10)飞行视觉装置重复以上动作,完成b1到b
m
的喷胶操作;
[0049]
重复以上步骤,飞行视觉装置和喷胶装置完成c1到c
m
的喷胶操作
……
直至整个工件喷胶完成。
[0050]
如图2所示,飞行视觉装置在运动中对基材上的待喷胶位置进行识别定位,并计算得到运动装置喷胶到达位置;运动装置根据待喷胶位置和喷胶装置当前位置的距离s1计算所需运动速度v1和时间t1;喷胶装置在运动途中准备胶水并计算提前喷胶时间t2,t2为从触发喷胶装置至胶点落到基材上的时间;喷胶装置运动到喷胶装置提前触发位置,即s1-v1
×
t2,触发喷胶装置将胶喷出。
[0051]
其中,a1~a
m
的路线与b1~b
m
的路线呈“z”字形;b1~b
m
的路线与c1~c
m
的路线呈“z”字形,以此类推。
[0052]
如图3所示,该飞行点胶方法采用的飞行点胶设备,包括基材5,设备框架4、运动装置3、喷胶装置2、飞行视觉装置1;设备框架上装有运动装置3,喷胶装置2和飞行视觉装置1装在运动装置3上。
[0053]
运动装置3包括xy轴,两个轴相互垂直,一个轴驱动飞行视觉装置1和喷胶装置2,另一个轴驱动待喷胶物料。
[0054]
运动装置3的驱动电机为直线电机、伺服电机或者步进电机;采用龙门架构安装飞行视觉装置和喷胶装置2;飞行视觉装置可对喷胶位置定位反馈给运动装置进行位置偏移补偿。
[0055]
飞行视觉装置1上设有1个相机,位于喷胶装置一侧。喷胶装置和飞行视觉装置的间距为l,同一行待喷胶的相邻两点间距为b,l=n
×
b,n为正整数。
[0056]
在其他有益变形实施例中,飞行视觉装置上设有2个相机,两个相机分列喷胶装置两侧。这样可以走“己”字形路线。在走相邻路线时分别启用不同的相机。比较“z”字形路线,可以节省飞行路径。
[0057]
以上所述的实施例仅仅是对本发明的优选实施方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案作出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1