一种箱梁端面喷涂装置及喷涂方法与流程
1.本发明属于箱梁端面喷涂技术领域,尤其是涉及一种箱梁端面喷涂装置及喷涂方法。
背景技术:
2.高速铁路与高速公路建设中,大量采用箱梁结构,在梁场预制好的箱梁,在端面喷涂聚氨酯防水涂料形成防水层,是不可缺少的工序。这层防水材料是箱梁张拉钢索的保护层,依靠保护层抵御锈蚀的侵害。
3.目前对箱梁端面的防水层的喷涂完全由人工操作,即首先由人工配制双组份聚氨酯防水涂料,然后再用滚子、毛刷、刮子等手工工具,多次刷涂。高速铁路用的每片箱梁一个端面需要刷涂聚氨酯防水涂料的面积有7.7
㎡
,标准要求涂刷厚度为4mm~5mm,一般需要涂刷8遍左右,因此每片箱梁两端总计需要刷聚氨酯防水涂料16遍、123
㎡
,工作量很大,且施工效率较低;另外高温施工、清洗剂挥发、高空作业也对人员的健康造成了危害。
4.因此,现如今缺少一种箱梁端面喷涂装置及喷涂方法,实现喷头机构的升降、左右和前后移动,能快速完成防水涂料的喷涂,节省人力和物力,提高了施工效率、喷涂质量和人员安全性。
技术实现要素:
5.本发明所要解决的技术问题在于针对上述现有技术中的不足,提供一种箱梁端面喷涂装置,其设计合理,实现喷头机构的升降、左右和前后移动,能快速完成防水涂料的喷涂,节省人力和物力,提高了施工效率、喷涂质量和人员安全性。
6.为解决上述技术问题,本发明采用的技术方案是:一种箱梁端面喷涂装置,其特征在于:包括行走机构、设置在所述行走机构上的供料机构和设置在所述行走机构上的升降水平调节机构,以及设置在所述升降水平调节机构上的喷头机构和设置在所述行走机构上的控制模块;
7.所述行走机构包括车体和设置在所述车体底部的履带行走机构,所述升降水平调节机构包括设置在车体上且沿箱梁端面高度方向布设的升降机构和设置在所述升降机构上且沿箱梁端面宽度布设的水平滑移机构,所述水平滑移机构上设置有伸缩与旋转机构,所述伸缩与旋转机构包括设置在所述水平滑移机构上的电动推杆和设置在电动推杆上的旋转头,所述喷头机构安装在旋转头上;
8.所述控制模块包括箱体、设置在箱体内的控制器和与所述控制器连接的无线接收器,所述升降机构、水平滑移机构、电动推杆和旋转头均由控制器进行控制。
9.上述的一种箱梁端面喷涂装置,其特征在于:所述升降机构包括竖向杆、安装在竖向杆上的升降座,以及带动所述升降座沿竖向杆升降的升降电机,所述水平滑移机构设置在所述升降座上;
10.所述升降电机的输出轴上连接有升降传动轴,所述升降传动轴上设置有升降齿
轮,所述竖向杆上设置有竖向齿条,所述竖向齿条沿竖向杆高度方向布设,所述升降齿轮和竖向齿条啮合。
11.上述的一种箱梁端面喷涂装置,其特征在于:所述升降座上设置有升降导向部件,所述升降导向部件包括设置在所述升降座上且位于竖向杆前侧面的第一组升降导向轮和设置所述升降座上且位于竖向杆后侧面的第二组升降导向轮,所述第一组升降导向轮和第二组升降导向轮均包括两个对称布设的升降导向轮;
12.所述竖向杆的前侧面上设置有第一组滑轨,所述竖向杆的后侧面上设置有第二组滑轨,所述第一组滑轨和第二组滑轨均包括两个对称布设的升降滑轨,所述升降导向轮沿升降滑轨滑移。
13.上述的一种箱梁端面喷涂装置,其特征在于:所述水平滑移机构包括水平杆、安装在水平杆上的水平座,以及带动所述水平座沿水平杆长度方向移动的水平电机,所述电动推杆设置在所述水平座上;
14.所述水平电机的输出轴上连接有水平传动轴,所述水平传动轴上设置有水平齿轮,所述水平杆上设置有水平齿条,所述水平齿条沿水平杆长度方向布设,所述水平齿轮和水平齿条啮合。
15.上述的一种箱梁端面喷涂装置,其特征在于:所述水平座上设置有水平导向部件,所述水平导向部件包括设置在所述水平座上且位于水平杆上侧面的第一组水平导向轮和设置所述水平座上且位于水平杆下侧面的第二组水平导向轮,所述第一组水平导向轮和第二组水平导向轮均包括两个对称布设的水平导向轮;
16.所述水平杆的上侧面设置有上组滑轨,所述水平杆的下侧面设置有下组滑轨,所述上组滑轨和下组滑轨均包括两个对称布设的水平滑轨,所述水平导向轮沿水平滑轨滑移。
17.上述的一种箱梁端面喷涂装置,其特征在于:所述车体上设置有空气压缩机;
18.所述喷头机构包括安装板、设置在安装板上的第一喷头座和第二喷头座,以及设置在第一喷头座上的第一喷头和设置在第二喷头座上的第二喷头;
19.所述供料机构的数量为两套,两套所述供料机构均包括供料桶和抽料泵,两个所述抽料泵的输出端连接静态混合器,所述静态混合器的输出端连接过渡阀,所述过渡阀经过管线均与第一喷头和第二喷头连接。
20.同时,本发明还公开了一种方法步骤简单、设计合理且实现方便、检测准确性高、使用效果好的箱梁端面喷涂方法,其特征在于,该方法包括以下步骤:
21.步骤一、箱梁端面的划分:
22.步骤101、将箱梁端面划分为第一箱梁端面区域、第二箱梁端面区域和第三箱梁端面区域;其中,第一端面区域和第三端面区域对称布设;
23.步骤102、将第一箱梁端面区域由外至内依次划分为第一个左喷涂区域,第二个左喷涂区域,...,第n
z
个左喷涂区域,...,第n
z
个左喷涂区域;其中,n
z
个左喷涂区域的长度相同,n
z
个左喷涂区域的长度方向沿箱梁端面的高度方向,n
z
个左喷涂区域的宽度相同,n
z
和n
z
均为正整数,且1≤n
z
≤n
z
,n
z
表示左喷涂区域的总数;
24.步骤103、将第二箱梁端面区域由上至下依次划分为第一个中喷涂区域,第二个中喷涂区域,...,第n
m
个中喷涂区域,...,第n
m
个中喷涂区域;其中,n
m
个中喷涂区域的长度沿
箱梁端面的宽度方向,n
m
个中喷涂区域的宽度方向沿箱梁端面的高度方向,n
z
个中喷涂区域的宽度相同,n
m
和n
m
均为正整数,且1≤n
m
≤n
m
,n
m
表示中喷涂区域的总数;
25.步骤104、将第三箱梁端面区域由外至内依次划分为第一个右喷涂区域,第二个右喷涂区域,...,第n
y
个右喷涂区域,...,第n
y
个右喷涂区域;其中,n
y
个右喷涂区域的长度相同,n
y
个右喷涂区域的长度方向沿箱梁端面的高度方向,n
y
个右喷涂区域的宽度相同,n
y
和n
y
均为正整数,且1≤n
y
≤n
y
,n
y
表示右喷涂区域的总数;
26.步骤二、第一箱梁端面区域的喷涂:
27.步骤201、将箱梁端面喷涂装置通过履带行走机构移动至第一箱梁端面区域处;其中,第一喷头和第二喷头之间的中心连线与n
z
个左喷涂区域的宽度方向平行;
28.步骤202、通过升降机构和水平滑移机构,以使所述喷头机构完成n
z
个左喷涂区域的喷涂,且相邻两个左喷涂区域的方法均相同,其中,对第n
z
个左喷涂区域和第n
z
+1个左喷涂区域进行喷涂,具体过程如下:
29.步骤2021、通过升降机构调节所述喷头机构向上移动,通过水平滑移机构调节所述喷头机构向右移动,从而将所述喷头机构移动至第n
z
个左喷涂区域的上端;
30.步骤2022、在升降机构调节所述喷头机构向下移动和水平滑移机构调节所述喷头机构向右移动的过程中,同时通过供料机构给所述喷头机构输送防水涂料,通过空气压缩机给所述喷头机构输送压缩气体,直至完成第n
z
个左喷涂区域的喷涂;
31.步骤2023、通过升降机构调节所述喷头机构向上移动,通过水平滑移机构调节所述喷头机构向右移动,从而将所述喷头机构移动至第n
z
+1个左喷涂区域的上端;
32.步骤2024、在升降机构调节所述喷头机构向下移动和水平滑移机构调节所述喷头机构向右移动的过程中,同时通过供料机构给所述喷头机构输送防水涂料,通过空气压缩机给所述喷头机构输送压缩气体,直至完成第n
z
+1个左喷涂区域的喷涂;
33.步骤三、第二箱梁端面区域的喷涂:
34.步骤301、将箱梁端面喷涂装置通过履带行走机构移动至第二箱梁端面区域处;
35.步骤302、操作旋转头旋转90
°
,以使所述喷头机构中第一喷头和第二喷头之间的中心连线与n
m
个中喷涂区域的宽度方向平行;
36.步骤303、通过升降机构和水平滑移机构,以使所述喷头机构完成n
m
个中喷涂区域的喷涂,且相邻两个中喷涂区域的方法均相同,其中,对第n
m
个中喷涂区域和第n
m
+1个中喷涂区域进行喷涂,具体过程如下:
37.步骤3031、通过升降机构调节所述喷头机构向上移动,通过水平滑移机构调节所述喷头机构向右移动,从而将所述喷头机构移动至第n
m
个中喷涂区域的左端;
38.步骤3032、在水平滑移机构调节所述喷头机构向右移动的过程中,同时通过供料机构给所述喷头机构输送防水涂料,通过空气压缩机给所述喷头机构输送压缩气体,直至完成第n
m
个中喷涂区域的喷涂;
39.步骤3033、通过升降机构调节所述喷头机构向左移动,通过升降机构调节所述喷头机构向下移动,从而将所述喷头机构移动至第n
m
+1个中喷涂区域的左端;
40.步骤3034、在水平滑移机构调节所述喷头机构向右移动的过程中,同时通过供料机构给所述喷头机构输送防水涂料,通过空气压缩机给所述喷头机构输送压缩气体,直至完成第n
m
+1个中喷涂区域的喷涂;
41.步骤四、第三箱梁端面区域的喷涂:
42.步骤401、将箱梁端面喷涂装置通过履带行走机构移动至第三箱梁端面区域处;
43.步骤402、操作旋转头反向旋转90
°
,以使所述喷头机构中第一喷头和第二喷头之间的中心连线与n
z
个右喷涂区域的宽度方向平行;
44.步骤403、通过升降机构和水平滑移机构,以使所述喷头机构完成n
y
个右喷涂区域的喷涂,且相邻两个右喷涂区域的方法均相同,其中,对第n
y
个右喷涂区域和第n
y
+1个右喷涂区域进行喷涂,具体过程如下:
45.步骤4031、通过升降机构调节所述喷头机构向上移动,通过水平滑移机构调节所述喷头机构水平移动,从而将所述喷头机构移动至第n
y
个右喷涂区域的上端;
46.步骤4032、在升降机构调节所述喷头机构向下移动和水平滑移机构调节所述喷头机构向左移动的过程中,同时通过供料机构给所述喷头机构输送防水涂料,通过空气压缩机给所述喷头机构输送压缩气体,直至完成第n
y
个右喷涂区域的喷涂;
47.步骤4033、通过升降机构调节所述喷头机构向上移动,通过水平滑移机构调节所述喷头机构向左移动,从而将所述喷头机构移动至第n
y
+1个右喷涂区域的上端;
48.步骤4034、在升降机构调节所述喷头机构向下移动和水平滑移机构调节所述喷头机构向左移动的过程中,同时通过供料机构给所述喷头机构输送防水涂料,通过空气压缩机给所述喷头机构输送压缩气体,直至完成第n
y
+1个右喷涂区域的喷涂;
49.步骤五、重复步骤三至步骤四,实现对箱梁端面的下一次喷涂。
50.上述的方法,其特征在于:通过供料机构给所述喷头机构输送防水涂料之前,还需要进行以下步骤:
51.步骤a、在第二供料桶内盛装第一喷涂料,在第二供料桶内盛装第二喷涂料;
52.步骤b、操作第一抽料泵和第二抽料泵工作,第一抽料泵将第一供料桶中的第一喷涂料输送至静态混合器中,同时第二抽料泵将第二供料桶中的第二喷涂料输送至静态混合器中,以使第一喷涂料和第二喷涂料混合,得到防水涂料;其中,通过第一抽料泵和第二抽料泵以使静态混合器中的第一喷涂料和第二喷涂料满足喷涂质量比要求;
53.步骤c、防水涂料通过过渡阀和管线进入第一喷头和第二喷头,同时,通过空气压缩机给所述喷头机构输送压缩气体,以使第一喷头和第二喷头对箱梁端面进行防水材料的喷涂。
54.上述的方法,其特征在于:通过升降机构和水平滑移机构调节所述喷头机构,具体过程如下:
55.升降电机转动,升降电机转动通过升降传动轴带动升降齿轮转动,使升降齿轮沿竖向齿条向上移动,升降齿轮沿竖向齿条向上移动的过程中,通过所述升降座带动所述喷头机构向上移动;
56.升降电机反向转动,升降电机反向转动通过升降传动轴带动升降齿轮反向转动,使升降齿轮沿竖向齿条向下移动,升降齿轮沿竖向齿条向下移动的过程中,通过所述升降座带动所述喷头机构向下移动;
57.水平电机转动,水平电机转动通过水平传动轴带动水平齿轮转动,使水平齿轮沿水平齿条向左移动,水平齿轮沿水平齿条向左移动的过程中,通过所述水平座带动所述喷头机构向左移动;
58.水平电机反向转动,水平电机反向转动通过水平传动轴带动水平齿轮反向转动,使水平齿轮沿水平齿条向右移动,水平齿轮沿水平齿条向右移动的过程中,通过所述水平座带动所述喷头机构向右移动。
59.上述的方法,其特征在于:在所述喷头机构进行喷涂的过程中,所述喷头机构的喷涂速度v
s
为10m/min~50m/min;
60.设定箱梁端面中箱梁斜面与箱梁顶面之间的夹角为α,则步骤2022中在升降机构调节所述喷头机构向下移动和水平滑移机构调节所述喷头机构向右移动的过程中,所述喷头机构向下移动的速度为sinαv
s
,所述喷头机构向右移动的速度为cosαv
s
;
61.步骤4032中在升降机构调节所述喷头机构向下移动和水平滑移机构调节所述喷头机构向左移动的过程中,所述喷头机构向下移动的速度为sinαv
s
,所述喷头机构向左移动的速度为cosαv
s
;
62.所述喷头机构的喷射面距离箱梁端面的设定间距为20cm~80cm;
63.所述喷头机构的喷洒量为0.2l/m2~2.0l/m2;
64.所述喷头机构中设置第一喷头、第二喷头、第一超声波测距传感器和第二超声波测距传感器,所述第一喷头和第二喷头的连线中心与第一超声波测距传感器和第二超声波测距传感器的连线中心投影重合;
65.在所述喷头机构喷涂的过程中,当第一超声波测距传感器未检测到距离值且第二超声波测距传感器检测到距离值时,说明所述喷头机构上升至箱梁端面的顶部,升降电机停止转动;当第二超声波测距传感器未检测到距离值且第一超声波测距传感器检测到距离值时,说明所述喷头机构下降至箱梁端面的底部,升降电机停止转动;
66.步骤3032中第n
m
个中喷涂区域的喷涂和步骤3034中第n
m
+1个中喷涂区域的喷涂的过程中:
67.水平滑移机构调节所述喷头机构向右移动,还通过电动推杆伸缩带动所述喷头机构靠近或者远离箱梁端面,且在所述喷头机构靠近或者远离箱梁端面的过程中,以使第一超声波测距传感器和第二超声波测距传感器检测到的距离值满足所述喷头机构的喷射面距离箱梁端面的设定间距。
68.本发明与现有技术相比具有以下优点:
69.1、本发明结构简单、设计合理且安装布设简便,操作便捷。
70.2、所采用的升降机构带动水平滑移机构上下移动,从而实现喷头机构的z方向移动;设置水平滑移机构左右移动,从而实现喷头机构的x方向移动;设置伸缩与旋转机构,是为了调节所述喷头机构靠近或者远离箱梁端面前后移动,从而实现喷头机构的y方向移动,通过喷头机构的升降、左右和前后移动,能快速完成聚氨酯防水涂料的喷涂;另外通过调节喷头机构的x、y、z方向的移动,可以满足高速铁路、高速公路使用的多种断面形状的箱梁喷涂的需要。
71.3、所采用的旋转头,是为了带动所述喷头机构旋转,从而有效地适应第一箱梁端面区域、第二箱梁端面区域和第三箱梁端面区域的喷涂,实现纵向、横向箱梁端面区域的快速喷涂,提高了作业效率。
72.4、所采用的供料机构,是为了通过供料机构给所述喷头机构输送防水涂料,实现箱梁端面的喷涂,避免人工配制双组份聚氨酯防水涂料过程中的原料由于过早固化造成的
浪费。
73.5、所采用的行走机构包括车体和设置在所述车体底部的履带行走机构,既能提高了该箱梁端面喷涂装置移动的便捷性,又能配合水平滑移机构实现喷头机构在第一箱梁端面区域、第二箱梁端面区域和第三箱梁端面区域的喷涂。
74.6、本发明对箱梁端面喷涂,一方面工作效率是人工涂刷的3倍,喷涂均匀度较人工提高;另一方面节约材料,确保涂层质量的同时大幅度降低劳动强度,节约人力,缩短工期。
75.7、本发明箱梁端面喷涂方法步骤简单、实现方便且操作简便,确保箱梁端面喷涂的质量。
76.8、所采用的箱梁端面喷涂方法操作简便且使用效果好,首先是箱梁端面的划分,其次进行第一箱梁端面区域的喷涂、第二箱梁端面区域的喷涂和第三箱梁端面区域的喷涂,重复上述步骤,实现对箱梁端面的下一次喷涂,直至完成箱梁端面的喷涂。
77.综上所述,本发明设计合理,实现喷头机构的升降、左右和前后移动,能快速完成防水涂料的喷涂,节省人力和物力,提高了施工效率、喷涂质量和人员安全性。
78.下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
附图说明
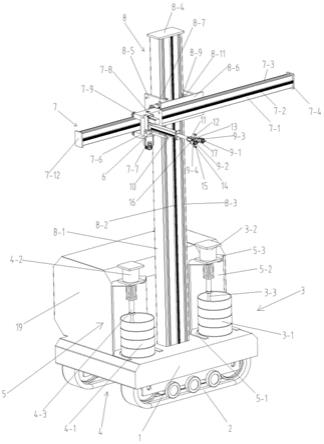
79.图1为本发明箱梁端面喷涂装置除去管线后的结构示意图。
80.图2为本发明箱梁端面喷涂装置水平滑移机构的结构示意图。
81.图3为本发明箱梁端面喷涂装置升降机构的结构示意图。
82.图4为本发明箱梁端面喷涂装置喷头机构的结构示意图。
83.图5为本发明箱梁端面喷涂装置的电路原理框图。
84.图6为本发明箱梁端面喷涂装置的使用状态图。
85.图7为本发明箱梁端面喷涂方法的流程框图。
86.附图标记说明:
87.1—车体;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2—履带行走机构;
ꢀꢀꢀꢀꢀꢀ
3—第一供料机构;
88.3-1—第一供料桶;
ꢀꢀꢀꢀꢀꢀ
3-2—第一抽料泵;
ꢀꢀꢀꢀꢀꢀ
3-3—第一进料管;
89.4—第二供料机构;
ꢀꢀꢀꢀꢀꢀ
4-1—第二供料桶;
ꢀꢀꢀꢀꢀꢀ
4-2—第二抽料泵;
90.4-3—第二进料管;
ꢀꢀꢀꢀꢀꢀ
5—固定支架;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
5-1—弧形底板;
91.5-2—竖向弧板;
ꢀꢀꢀꢀꢀꢀꢀꢀ
5-3—顶部平板;
ꢀꢀꢀꢀꢀꢀꢀꢀ
6—静态混合器;
92.7—水平滑移机构;
ꢀꢀꢀꢀꢀꢀ
7-1—水平杆;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
7-2—水平齿条;
93.7-3—水平滑轨;
ꢀꢀꢀꢀꢀꢀꢀꢀ
7-4—第一水平限位板;
ꢀꢀ
7-5—水平板;
94.7-6—水平连接板;
ꢀꢀꢀꢀꢀꢀ
7-7—水平电机;
ꢀꢀꢀꢀꢀꢀꢀꢀ
7-8—水平传动轴;
95.7-9—水平导向轮;
ꢀꢀꢀꢀꢀꢀ
7-10—水平齿轮;
ꢀꢀꢀꢀꢀꢀꢀ
7-11—第二轮轴;
96.7-12—第二水平限位板; 8—升降机构;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
8-1—竖向杆;
97.8-2—竖向齿条;
ꢀꢀꢀꢀꢀꢀꢀꢀ
8-3—升降滑轨;
ꢀꢀꢀꢀꢀꢀꢀꢀ
8-4—上限位板;
98.8-5—竖向板;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
8-6—连接板;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
8-7—升降电机;
99.8-8—升降传动轴;
ꢀꢀꢀꢀꢀꢀ
8-9—升降导向轮;
ꢀꢀꢀꢀꢀꢀ
8-10—升降齿轮;
100.8-11—第一轮轴;
ꢀꢀꢀꢀꢀꢀꢀ
9-1—第一喷头;
ꢀꢀꢀꢀꢀꢀꢀꢀ
9-2—第二喷头;
101.9-3—第一喷头座;
ꢀꢀꢀꢀꢀꢀ
9-4—第二喷头座;
ꢀꢀꢀꢀꢀꢀ
10—电动推杆;
102.11—旋转头;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
12—第一超声波测距传感器;
103.13—第一耳板;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
14—第二超声波测距传感器;
104.15—第二耳板;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
16—安装板;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
17—过渡阀;
105.18—控制器;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
18-1—无线接收器;
ꢀꢀꢀꢀ
18-2—手持遥控器;
106.18-3—水平电机驱动器;
ꢀꢀꢀꢀꢀꢀꢀꢀ
18-4—升降电机驱动器;
107.18-5—行走电机;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
18-6—行走电机驱动器;
108.18-7—电动推杆驱动器;
ꢀꢀꢀꢀꢀꢀꢀꢀ
19—空气压缩机;
109.20-1—第一个左喷涂区域;
ꢀꢀꢀꢀꢀꢀ
20-2—第二个左喷涂区域;
110.20-3—第三个左喷涂区域;
ꢀꢀꢀꢀꢀꢀ
21-1—第一个中喷涂区域;
111.21-2—第二个中喷涂区域;
ꢀꢀꢀꢀꢀꢀ
22-1—第一个右喷涂区域;
112.22-2—第二个右喷涂区域;
ꢀꢀꢀꢀꢀꢀ
22-3—第三个右喷涂区域。
具体实施方式
113.如图1至图5所示的一种箱梁端面喷涂装置,包括行走机构、设置在所述行走机构上的供料机构和设置在所述行走机构上的升降水平调节机构,以及设置在所述升降水平调节机构上的喷头机构和设置在所述行走机构上的控制模块;
114.所述行走机构包括车体1和设置在所述车体1底部的履带行走机构2,所述升降水平调节机构包括设置在车体1上且沿箱梁端面高度方向布设的升降机构8和设置在所述升降机构8上且沿箱梁端面宽度布设的水平滑移机构7,所述水平滑移机构7上设置有伸缩与旋转机构,所述伸缩与旋转机构包括设置在所述水平滑移机构7上的电动推杆10和设置在电动推杆10上的旋转头11,所述喷头机构安装在旋转头11上;
115.所述控制模块包括箱体、设置在箱体内的控制器18和与所述控制器18连接的无线接收器18-1,所述升降机构8、水平滑移机构7、电动推杆10和旋转头11均由控制器18进行控制。
116.如图3所示,本实施例中,所述升降机构8包括竖向杆8-1、安装在竖向杆8-1上的升降座,以及带动所述升降座沿竖向杆8-1升降的升降电机8-7,所述水平滑移机构7设置在所述升降座上;
117.所述升降电机8-7的输出轴上连接有升降传动轴8-8,所述升降传动轴8-8上设置有升降齿轮8-10,所述竖向杆8-1上设置有竖向齿条8-2,所述竖向齿条8-2沿竖向杆8-1高度方向布设,所述升降齿轮8-10和竖向齿条8-2啮合。
118.本实施例中,所述升降座上设置有升降导向部件,所述升降导向部件包括设置在所述升降座上且位于竖向杆8-1前侧面的第一组升降导向轮和设置所述升降座上且位于竖向杆8-1后侧面的第二组升降导向轮,所述第一组升降导向轮和第二组升降导向轮均包括两个对称布设的升降导向轮8-9;所述竖向杆8-1的前侧面上设置有第一组滑轨,所述竖向杆8-1的后侧面上设置有第二组滑轨,所述第一组滑轨和第二组滑轨均包括两个对称布设的升降滑轨8-3,所述升降导向轮8-9沿升降滑轨8-3滑移。
119.如图2所示,本实施例中,所述水平滑移机构7包括水平杆7-1、安装在水平杆7-1上的水平座,以及带动所述水平座沿水平杆7-1长度方向移动的水平电机7-7,所述电动推杆10设置在所述水平座上;所述水平电机7-7的输出轴上连接有水平传动轴7-8,所述水平传
动轴7-8上设置有水平齿轮7-10,所述水平杆7-1上设置有水平齿条7-2,所述水平齿条7-2沿水平杆7-1长度方向布设,所述水平齿轮7-10和水平齿条7-2啮合。
120.本实施例中,所述水平座上设置有水平导向部件,所述水平导向部件包括设置在所述水平座上且位于水平杆7-1上侧面的第一组水平导向轮和设置所述水平座上且位于水平杆7-1下侧面的第二组水平导向轮,所述第一组水平导向轮和第二组水平导向轮均包括两个对称布设的水平导向轮7-9;所述水平杆7-1的上侧面设置有上组滑轨,所述水平杆7-1的下侧面设置有下组滑轨,所述上组滑轨和下组滑轨均包括两个对称布设的水平滑轨7-3,所述水平导向轮7-9沿水平滑轨7-3滑移。
121.如图4所示,本实施例中,所述车体1上设置有空气压缩机19;
122.所述喷头机构包括安装板16、设置在安装板16上的第一喷头座9-3和第二喷头座9-4,以及设置在第一喷头座9-3上的第一喷头9-1和设置在第二喷头座9-4上的第二喷头9-2;
123.所述供料机构的数量为两套,两套所述供料机构均包括供料桶和抽料泵,两个所述抽料泵的输出端连接静态混合器6,所述静态混合器6的输出端连接过渡阀17,所述过渡阀17经过管线均与第一喷头9-1和第二喷头9-2连接。
124.本实施例中,需要说明的是,箱体设置在车体1上。
125.本实施例中,设置升降机构带动水平滑移机构上下移动,从而实现喷头机构的上下移动;设置水平滑移机构左右移动,从而实现喷头机构的左右移动;设置伸缩与旋转机构,是为了调节所述喷头机构靠近或者远离箱梁端面,从而实现喷头机构的前后移动,从而实现喷头机构的升降、左右和前后移动,能快速完成聚氨酯防水涂料的喷涂。
126.本实施例中,设置旋转头11,是为了带动所述喷头机构旋转,从而有效地适应第一箱梁端面区域、第二箱梁端面区域和第三箱梁端面区域的喷涂,提高了便捷性和施工效率。
127.本实施例中,设置供料机构,是为了通过供料机构给所述喷头机构输送防水涂料,实现箱梁端面的喷涂,减少人工参与。
128.本实施例中,行走机构包括车体和设置在所述车体底部的履带行走机构,通过车体方便升降水平调节机构的安装,提高了集成度;通过设置履带行走机构,既能提高了该箱梁端面喷涂装置的便捷性,从而能配合水平滑移机构实现喷头机构的左右移动。
129.本实施例中,该喷涂装置对箱梁端面喷涂,一方面工作效率是人工涂刷的3倍,喷涂均匀度较人工提高;另一方面节约材料,确保涂层质量的同时大幅度降低劳动强度,节约人力,缩短工期。
130.本实施例中,设置升降齿轮8-10和竖向齿条8-2啮合,一方面能实现升降齿轮8-10沿竖向齿条8-2升降;另一方面是为了在升降电机8-7停止转动时,通过竖向齿条8-2和升降齿轮8-10啮合,避免升降齿轮8-10滑移,提高了竖向调节的准确性和稳定性。
131.本实施例中,设置水平齿轮7-10和水平齿条7-2啮合,一方面能实现水平齿轮7-10沿水平齿条7-2移动;另一方面是为了在水平电机7-7停止转动时,通过水平齿条7-2和水平齿轮7-10啮合,避免水平齿轮7-10滑移,提高了水平调节的准确性和稳定性。
132.本实施例中,所述升降座包括两个对称设置在竖向杆8-1两侧的竖向板8-5和连接在两个竖向板8-5之间的连接板8-6,所述连接板8-6的长度大于两个竖向板8-5之间的间距,所述连接板8-6伸出竖向板8-5的一端和竖向板8-5之间设置有供升降电机8-7安装的容
纳腔。
133.本实施例中,所述竖向板8-5上设置有供升降导向轮8-9安装的第一轮轴8-11。
134.本实施例中,所述竖向杆8-1的顶部设置有上限位板8-4。设置上限位板8-4,是为了在所述升降座沿竖向杆8-1升降过程中,避免升降导向轮8-9滑脱升降滑轨8-3以及升降齿轮8-10脱离竖向齿条8-2,无法有效地进行升降往复移动调节。
135.本实施例中,所述水平座包括两个对称设置在水平杆7-1上下两侧的水平板7-5和连接在两个水平板7-5之间的水平连接板7-6,两个水平板7-5平行布设,且两个水平板7-5均与水平连接板7-6呈垂直布设。
136.本实施例中,所述水平电机7-7安装在位于水平杆7-1下方的水平板7-5的底部。所述水平板7-5远离水平连接板7-6的端面设置有供水平导向轮7-9安装的第二轮轴7-11。
137.本实施例中,所述水平杆7-1的一端设置有第一水平限位板7-4,所述水平杆7-1的另一端设置有第二水平限位板7-12。
138.本实施例中,设置第一水平限位板7-4和第二水平限位板7-12,是为了在所述水平座沿水平杆7-1长度方向移动的过程中,对水平导向轮7-9进行限位,避免水平导向轮7-9滑脱水平滑轨7-3,以及水平齿轮7-10脱离水平齿条7-2,无法有效地进行水平往复移动调节。
139.本实施例中,两个所述供料机构分别为第一供料机构3和第二供料机构4,所述第一供料机构3包括第一供料桶3-1和第一抽料泵3-2,所述第一抽料泵3-2的入口通过第一进料管3-3与第一供料桶3-1连通,所述第一抽料泵3-2的出口通过第一输料管线与静态混合器6的一个入口连接;
140.所述第二供料机构4包括第二供料桶4-1和第二抽料泵4-2,所述第二抽料泵4-2的入口通过第二进料管4-3与第二供料桶4-1连通,所述第二抽料泵4-2的出口通过第二输料管线与静态混合器6的另一个入口连接,所述静态混合器6的输出经过连接管线与过渡阀17的入口端连接;
141.所述过渡阀17的一个出口端经过第一管线与第一喷头9-1连接,过渡阀17的另一个出口端经过第二管线与第二喷头9-2连接。
142.本实施例中,实际使用时,第一抽料泵3-2和第二抽料泵4-2可采用气动泵或电动泵。
143.本实施例中,实际使用时,所述静态混合器6的底部设置有进气口,所述空气压缩机19通过管线连接静态混合器6的底部的进气口,这样通过引入压缩空气,用来进一步提高涂料的雾化程度,促使双组份涂料的进一步混合。
144.本实施例中,所述安装板16上设置有第一耳板13和第二耳板15,所述第一耳板13上设置有第一超声波测距传感器12,所述第二耳板15上设置有第二超声波测距传感器14。
145.本实施例中,实际使用时,所述第一超声波测距传感器12和第二超声波测距传感器14的检测面均朝向待喷涂的箱梁端面。
146.本实施例中,实际使用时,第一喷头9-1和第二喷头9-2的中心连线与第一超声波测距传感器12和第二超声波测距传感器14的中心连线呈垂直布设。
147.本实施例中,所述车体1上设置有两个分别供第一供料机构3和第二供料机构4安装的固定支架5,所述固定支架5包括设置在车体1上的弧形底板5-1、与弧形底板5-1连接的竖向弧板5-2和设置在竖向弧板5-2顶部的顶部平板5-3。
148.本实施例中,实际使用时,第一供料桶1-1和第二供料桶4-1安装在弧形底板5-1内,实现对第一供料桶1-1和第二供料桶4-1的限位;设置竖向弧板5-2,是为了对第一供料桶1-1和第二供料桶4-1进行一步保护,避免第一供料桶1-1和第二供料桶4-1倾斜溢流;设置顶部平板5-3是为了便于第一抽料泵3-2和第二抽料泵4-2的安装。
149.本实施例中,实际使用时,所述升降电机8-7、水平电机7-7、电动推杆10和旋转头11均由控制器18进行控制。
150.本实施例中,实际使用时,所述第一超声波测距传感器12和第二超声波测距传感器14的输出端与控制器18连接。
151.本实施例中,控制器18可参考tec-172工业控制器,所述无线接收器18-1可采用川户k2-6/8rx接收器。
152.本实施例中,实际使用时,还包括与无线接收器18-1通信的手持遥控器18-2。
153.本实施例中,所述手持遥控器18-2可采用川户k2-6/8tx的手持遥控器。
154.本实施例中,第一喷头9-1和第二喷头9-2均为zoetic-9530雾化喷头。
155.本实施例中,第一超声波测距传感器12和第二超声波测距传感器14均可采用75khz收发一体式超声波测距传感器。
156.本实施例中,电动推杆10可采用qda60精密伺服电动推杆。
157.本实施例中,旋转头11安装在电动推杆10的伸缩端。
158.本实施例中,旋转头11为90度转角气缸。
159.本实施例中,旋转头11可采用qckl32型号的90度转角气缸。
160.本实施例中,升降电机8-7和水平电机7-7均为伺服电机。
161.本实施例中,进一步优选,升降电机8-7和水平电机7-7均为台达ecma-c30807es的伺服电机。
162.如图5所示,本实施例中,实际连接时,所述控制器18输出端接有用于控制升降电机8-7的升降电机驱动器18-4、用于控制水平电机7-7的水平电机驱动器18-3和用于控制电动推杆10的电动推杆驱动器18-7。
163.本实施例中,升降电机驱动器18-4和水平电机驱动器18-3均可采用台达asda-ab伺服驱动器。
164.本实施例中,电动推杆驱动器18-7可采用57步进电机驱动器。
165.本实施例中,实际使用时,所述车体1上设置有与履带行走机构2传动连接的行走电机18-5,所述控制器18输出端接有用于控制行走电机18-5的行走电机驱动器18-6。
166.本实施例中,实际使用时,履带行走机构2可采用本领域技术人员熟知的履带行走机构。
167.本实施例中,行走电机18-5和行走电机驱动器18-6均为两个。行走电机驱动器18-6可采用百格拉sg-30a电机驱动器,行走电机18-5可采用130sg-m15025交流伺服电机。具体使用时,行走电机18-5还可采用直流电机,例如13odk-m15025低压伺服电机直流,行走电机驱动器18-6可采用dcx-09016-opc行走电机驱动器。
168.本实施例中,需要说明的是,该箱梁端面喷涂装置中各个部件的型号可以根据实际需求进行适当调整。
169.本实施例中,具体使用时,所述升降传动轴8-8上设置有升降编码器,所述水平传
动轴7-8上设置有水平编码器。
170.本实施例中,升降编码器和水平编码器可参考欧姆龙编码器。
171.本实施例中,通过设置升降编码器,实现上下移动长度的检测,从而便于及时控制升降电机8-7的启动或停止;通过设置水平编码器,实现水平滑移长度的检测,从而便于及时控制水平电机7-7的启动或停止。
172.如图6和图7所示的一种箱梁端面喷涂方法,包括以下步骤:
173.步骤一、箱梁端面的划分:
174.步骤101、将箱梁端面划分为第一箱梁端面区域、第二箱梁端面区域和第三箱梁端面区域;其中,第一端面区域和第三端面区域对称布设;
175.步骤102、将第一箱梁端面区域由外至内依次划分为第一个左喷涂区域,第二个左喷涂区域,...,第n
z
个左喷涂区域,...,第n
z
个左喷涂区域;其中,n
z
个左喷涂区域的长度相同,n
z
个左喷涂区域的长度方向沿箱梁端面的高度方向,n
z
个左喷涂区域的宽度相同,n
z
和n
z
均为正整数,且1≤n
z
≤n
z
,n
z
表示左喷涂区域的总数;
176.步骤103、将第二箱梁端面区域由上至下依次划分为第一个中喷涂区域,第二个中喷涂区域,...,第n
m
个中喷涂区域,...,第n
m
个中喷涂区域;其中,n
m
个中喷涂区域的长度沿箱梁端面的宽度方向,n
m
个中喷涂区域的宽度方向沿箱梁端面的高度方向,n
z
个中喷涂区域的宽度相同,n
m
和n
m
均为正整数,且1≤n
m
≤n
m
,n
m
表示中喷涂区域的总数;
177.步骤104、将第三箱梁端面区域由外至内依次划分为第一个右喷涂区域,第二个右喷涂区域,...,第n
y
个右喷涂区域,...,第n
y
个右喷涂区域;其中,n
y
个右喷涂区域的长度相同,n
y
个右喷涂区域的长度方向沿箱梁端面的高度方向,n
y
个右喷涂区域的宽度相同,n
y
和n
y
均为正整数,且1≤n
y
≤n
y
,n
y
表示右喷涂区域的总数;
178.步骤二、第一箱梁端面区域的喷涂:
179.步骤201、将箱梁端面喷涂装置通过履带行走机构2移动至第一箱梁端面区域处;其中,第一喷头9-1和第二喷头9-2之间的中心连线与n
z
个左喷涂区域的宽度方向平行;
180.步骤202、通过升降机构8和水平滑移机构7,以使所述喷头机构完成n
z
个左喷涂区域的喷涂,且相邻两个左喷涂区域的方法均相同,其中,对第n
z
个左喷涂区域和第n
z
+1个左喷涂区域进行喷涂,具体过程如下:
181.步骤2021、通过升降机构8调节所述喷头机构向上移动,通过水平滑移机构7调节所述喷头机构向右移动,从而将所述喷头机构移动至第n
z
个左喷涂区域的上端;
182.步骤2022、在升降机构8调节所述喷头机构向下移动和水平滑移机构7调节所述喷头机构向右移动的过程中,同时通过供料机构给所述喷头机构输送防水涂料,通过空气压缩机19给所述喷头机构输送压缩气体,直至完成第n
z
个左喷涂区域的喷涂;
183.步骤2023、通过升降机构8调节所述喷头机构向上移动,通过水平滑移机构7调节所述喷头机构向右移动,从而将所述喷头机构移动至第n
z
+1个左喷涂区域的上端;
184.步骤2024、在升降机构8调节所述喷头机构向下移动和水平滑移机构7调节所述喷头机构向右移动的过程中,同时通过供料机构给所述喷头机构输送防水涂料,通过空气压缩机19给所述喷头机构输送压缩气体,直至完成第n
z
+1个左喷涂区域的喷涂;
185.步骤三、第二箱梁端面区域的喷涂:
186.步骤301、将箱梁端面喷涂装置通过履带行走机构2移动至第二箱梁端面区域处;
187.步骤302、操作旋转头11旋转90
°
,以使所述喷头机构中第一喷头9-1和第二喷头9-2之间的中心连线与n
m
个中喷涂区域的宽度方向平行;
188.步骤303、通过升降机构8和水平滑移机构7,以使所述喷头机构完成n
m
个中喷涂区域的喷涂,且相邻两个中喷涂区域的方法均相同,其中,对第n
m
个中喷涂区域和第n
m
+1个中喷涂区域进行喷涂,具体过程如下:
189.步骤3031、通过升降机构8调节所述喷头机构向上移动,通过水平滑移机构7调节所述喷头机构向右移动,从而将所述喷头机构移动至第n
m
个中喷涂区域的左端;
190.步骤3032、在水平滑移机构7调节所述喷头机构向右移动的过程中,同时通过供料机构给所述喷头机构输送防水涂料,通过空气压缩机19给所述喷头机构输送压缩气体,直至完成第n
m
个中喷涂区域的喷涂;
191.步骤3033、通过升降机构8调节所述喷头机构向左移动,通过升降机构8调节所述喷头机构向下移动,从而将所述喷头机构移动至第n
m
+1个中喷涂区域的左端;
192.步骤3034、在水平滑移机构7调节所述喷头机构向右移动的过程中,同时通过供料机构给所述喷头机构输送防水涂料,通过空气压缩机19给所述喷头机构输送压缩气体,直至完成第n
m
+1个中喷涂区域的喷涂;
193.步骤四、第三箱梁端面区域的喷涂:
194.步骤401、将箱梁端面喷涂装置通过履带行走机构2移动至第三箱梁端面区域处;
195.步骤402、操作旋转头11反向旋转90
°
,以使所述喷头机构中第一喷头9-1和第二喷头9-2之间的中心连线与n
z
个右喷涂区域的宽度方向平行;
196.步骤403、通过升降机构8和水平滑移机构7,以使所述喷头机构完成n
y
个右喷涂区域的喷涂,且相邻两个右喷涂区域的方法均相同,其中,对第n
y
个右喷涂区域和第n
y
+1个右喷涂区域进行喷涂,具体过程如下:
197.步骤4031、通过升降机构8调节所述喷头机构向上移动,通过水平滑移机构7调节所述喷头机构水平移动,从而将所述喷头机构移动至第n
y
个右喷涂区域的上端;
198.步骤4032、在升降机构8调节所述喷头机构向下移动和水平滑移机构7调节所述喷头机构向左移动的过程中,同时通过供料机构给所述喷头机构输送防水涂料,通过空气压缩机19给所述喷头机构输送压缩气体,直至完成第n
y
个右喷涂区域的喷涂;
199.步骤4033、通过升降机构8调节所述喷头机构向上移动,通过水平滑移机构7调节所述喷头机构向左移动,从而将所述喷头机构移动至第n
y
+1个右喷涂区域的上端;
200.步骤4034、在升降机构8调节所述喷头机构向下移动和水平滑移机构7调节所述喷头机构向左移动的过程中,同时通过供料机构给所述喷头机构输送防水涂料,通过空气压缩机19给所述喷头机构输送压缩气体,直至完成第n
y
+1个右喷涂区域的喷涂;
201.步骤五、重复步骤三至步骤四,实现对箱梁端面的下一次喷涂。
202.本实施例中,通过供料机构给所述喷头机构输送防水涂料之前,还需要进行以下步骤:
203.步骤a、在第二供料桶4-1内盛装第一喷涂料,在第二供料桶4-1内盛装第二喷涂料;
204.步骤b、操作第一抽料泵3-2和第二抽料泵4-2工作,第一抽料泵3-2将第一供料桶3-1中的第一喷涂料输送至静态混合器6中,同时第二抽料泵4-2将第二供料桶4-1中的第二
喷涂料输送至静态混合器6中,以使第一喷涂料和第二喷涂料混合,得到防水涂料;其中,通过第一抽料泵3-2和第二抽料泵4-2以使静态混合器6中的第一喷涂料和第二喷涂料满足喷涂质量比要求;
205.步骤c、防水涂料通过过渡阀17和管线进入第一喷头9-1和第二喷头9-2,同时,通过空气压缩机19给所述喷头机构输送压缩气体,以使第一喷头9-1和第二喷头9-2对箱梁端面进行防水材料的喷涂。
206.本实施例中,通过升降机构8和水平滑移机构7调节所述喷头机构,具体过程如下:
207.升降电机8-7转动,升降电机8-7转动通过升降传动轴8-8带动升降齿轮8-10转动,使升降齿轮8-10沿竖向齿条8-2向上移动,升降齿轮8-10沿竖向齿条8-2向上移动的过程中,通过所述升降座带动所述喷头机构向上移动;
208.升降电机8-7反向转动,升降电机8-7反向转动通过升降传动轴8-8带动升降齿轮8-10反向转动,使升降齿轮8-10沿竖向齿条8-2向下移动,升降齿轮8-10沿竖向齿条8-2向下移动的过程中,通过所述升降座带动所述喷头机构向下移动;
209.水平电机7-7转动,水平电机7-7转动通过水平传动轴7-8带动水平齿轮7-10转动,使水平齿轮7-10沿水平齿条7-2向左移动,水平齿轮7-10沿水平齿条7-2向左移动的过程中,通过所述水平座带动所述喷头机构向左移动;
210.水平电机7-7反向转动,水平电机7-7反向转动通过水平传动轴7-8带动水平齿轮7-10反向转动,使水平齿轮7-10沿水平齿条7-2向右移动,水平齿轮7-10沿水平齿条7-2向右移动的过程中,通过所述水平座带动所述喷头机构向右移动。
211.本实施例中,在所述喷头机构进行喷涂的过程中,所述喷头机构的喷涂速度v
s
为10m/min~50m/min;
212.设定箱梁端面中箱梁斜面与箱梁顶面之间的夹角为α,则步骤2022中在升降机构8调节所述喷头机构向下移动和水平滑移机构7调节所述喷头机构向右移动的过程中,所述喷头机构向下移动的速度为sinαv
s
,所述喷头机构向右移动的速度为cosαv
s
;
213.步骤4032中在升降机构8调节所述喷头机构向下移动和水平滑移机构7调节所述喷头机构向左移动的过程中,所述喷头机构向下移动的速度为sinαv
s
,所述喷头机构向左移动的速度为cosαv
s
;所述喷头机构的喷射面距离箱梁端面的设定间距为20cm~80cm;第二箱梁端面区域喷涂中,喷头机构的移动速度为v
s
;
214.所述喷头机构的喷洒量为0.2l/m2~2.0l/m2;所述喷头机构中设置第一喷头9-1、第二喷头9-2、第一超声波测距传感器12和第二超声波测距传感器14,所述第一喷头9-1和第二喷头9-2的连线中心与第一超声波测距传感器12和第二超声波测距传感器14的连线中心投影重合;
215.在所述喷头机构喷涂的过程中,当第一超声波测距传感器12未检测到距离值且第二超声波测距传感器14检测到距离值时,说明所述喷头机构上升至箱梁端面的顶部,升降电机8-7停止转动;当第二超声波测距传感器14未检测到距离值且第一超声波测距传感器12检测到距离值时,说明所述喷头机构下降至箱梁端面的底部,升降电机8-7停止转动;
216.步骤3032中第n
m
个中喷涂区域的喷涂和步骤3034中第n
m
+1个中喷涂区域的喷涂的过程中:
217.水平滑移机构7调节所述喷头机构向右移动,还通过电动推杆10伸缩带动所述喷
头机构靠近或者远离箱梁端面,且在所述喷头机构靠近或者远离箱梁端面的过程中,以使第一超声波测距传感器12和第二超声波测距传感器14检测到的距离值满足所述喷头机构的喷射面距离箱梁端面的设定间距,确保凹陷区域的等距喷涂。
218.本实施例中,所述喷头机构的喷洒量是指第一喷头9-1和第二喷头的总喷洒量,实际使用时,第一喷头9-1和第二喷头的各个喷洒量相同。
219.本实施例中,n
z
=3,步骤102中将第一箱梁端面区域由外至内依次划分为第一个左喷涂区域20-1、第二个左喷涂区域20-2和第三个左喷涂区域20-3;其中,第一个左喷涂区域20-1、第二个左喷涂区域20-2和第三个左喷涂区域20-3的长度相同,且第一个左喷涂区域20-1、第二个左喷涂区域20-2和第三个左喷涂区域20-3的宽度相同。
220.本实施例中,n
m
=2,步骤103中将第二箱梁端面区域由上至下依次划分为第一个中喷涂区域21-1和第二个中喷涂区域21-2;其中,2个中喷涂区域的长度沿箱梁端面的宽度方向,2个中喷涂区域的宽度方向沿箱梁端面的高度方向,2个中喷涂区域的宽度相同。
221.本实施例中,n
y
=3,步骤104中将第三箱梁端面区域由外至内依次划分为第一个右喷涂区域22-1、第二个右喷涂区域22-2和第三个右喷涂区域22-3;其中,第一个右喷涂区域22-1、第二个右喷涂区域22-2和第三个右喷涂区域22-3的长度相同,且第一个右喷涂区域22-1、第二个右喷涂区域22-2和第三个右喷涂区域22-3的宽度相同。
222.本实施例中,聚氨酯防水涂料为双组分聚氨酯防水涂料,且双组分聚氨酯防水涂料包括a组分和b组分,且a组分和b组分的质量比为1:0.6~1:2.0。
223.本实施例中,具体使用时,a组分和b组分的质量比可以根据实际需要进行调整。具体使用时,第一喷涂料为a组分,第二喷涂料为b组分;或者第一喷涂料为b组分,第二喷涂料为a组分。
224.本实施例中,具体使用时,通过第一抽料泵3-2和第二抽料泵4-2以使静态混合器6中的a组分和b组分满足喷涂质量比要求。
225.本实施例中,需要说明的是,实际使用时,n
m
个中喷涂区域的端面为斜面,因此为了确保喷涂的均匀性,避免喷涂叠合,在靠近n
m
个中喷涂区域的端面处时可以操作第一喷头9-1或者第二喷头9-2关闭一个。
226.本实施例中,第一喷头9-1和第二喷头9-2之间的间距为120mm~130mm,第一喷头9-1的中心线和第二喷头9-2的中心线之间的夹角为15
°
~20
°
。本实施例中,所述安装板16上设置有对第一喷头座9-2和第二喷头座9-4进行支撑的三角垫块,以使第一喷头9-1的中心线和第二喷头9-2的中心线之间呈夹角布设。
227.本实施例中,具体使用时,当操作升降电机8-7转动时,可通过手持遥控器18-2发送升降电机转动命令,控制器18通过无线接收器18-1接收升降电机转动命令,控制器18通过升降电机驱动器18-4控制升降电机8-7转动;或者操作升降电机8-7反向转动时,可通过手持遥控器18-2发送升降电机反向转动命令,控制器18通过无线接收器18-1接收升降电机反向转动命令,控制器18通过升降电机驱动器18-4控制升降电机8-7反向转动。
228.本实施例中,具体使用时,当操作水平电机8-7转动时,可通过手持遥控器18-2发送水平电机转动命令,控制器18通过无线接收器18-1接收水平电机转动命令,控制器18通过水平电机驱动器18-4控制水平电机8-7转动;或者操作水平电机8-7反向转动时,可通过手持遥控器18-2发送水平电机反向转动命令,控制器18通过无线接收器18-1接收水平电机
反向转动命令,控制器18通过水平电机驱动器18-4控制水平电机8-7反向转动。
229.本实施例中,具体使用时,当操作电动推杆10伸长时,可通过手持遥控器18-2发送伸长命令,控制器18通过无线接收器18-1接收伸长命令,控制器18通过电动推杆驱动器18-7控制电动推杆10伸长;或者操作电动推杆10收缩时,可通过手持遥控器18-2发送收缩命令,控制器18通过无线接收器18-1接收收缩命令,控制器18通过电动推杆驱动器18-7控制电动推杆10收缩。
230.本实施例中,具体使用时,当操作旋转头11旋转时,可通过手持遥控器18-2发送旋转命令,控制器18通过无线接收器18-1接收旋转命令,控制器18控制旋转头11旋转90
°
;或者操作电动推杆10反向旋转时,可通过手持遥控器18-2发送反向旋转命令,控制器18通过无线接收器18-1接收反向旋转命令,控制器18控制旋转头11反向旋转90
°
复位。
231.本实施例中,具体使用时,当操作履带行走机构2移动时,可通过手持遥控器18-2发送行走命令,控制器18通过无线接收器18-1接收行走命令,控制器18通过行走电机驱动器18-6控制行走电机18-5转动,行走电机18-5转动带动履带行走机构2移动;或者操作履带行走机构2反向移动时,可通过手持遥控器18-2发送反向行走命令,控制器18通过无线接收器18-1接收反向行走命令,控制器18通过行走电机驱动器18-6控制行走电机18-5反向转动,行走电机18-5反向转动带动履带行走机构2反向移动。本实施例中,设置手持遥控器18-2和无线接收器18-1,实现远程控制,操作便捷。
232.综上所述,本发明设计合理,实现喷头机构的升降、左右和前后移动,能快速完成聚氨酯防水涂料的喷涂,节省人力和物力,提高了施工效率、喷涂质量和人员安全性。
233.以上所述,仅是本发明的较佳实施例,并非对本发明作任何限制,凡是根据本发明技术实质对以上实施例所作的任何简单修改、变更以及等效结构变化,均仍属于本发明技术方案的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1