一种玉片点胶粘贴装置的制作方法
1.本实用新型涉及机械设备领域,具体是一种玉片点胶粘贴装置。
背景技术:
2.并联机器人具有以下特点:无累积误差,精度较高;驱动装置可置于定平台上或接近定平台的位置,这样运动部分重量轻,速度高,动态响应好;结构紧凑,刚度高,承载能力大;完全对称的并联机构具有较好的各向同性;工作空间小;根据这些特点,玉片点胶装置及其方法在需要高刚度、高精度或者大载荷而无须很大工作空间的领域内得到了广泛应用。
3.在生产一种内部带有玉片的床垫时,需要将玉片一块块的粘接在床垫上,现有技术中一般通过人工对玉片进行拾取和粘接工艺处理,不仅耗费时间,工作效率较低,而且人工成本较高,此外,由于玉片具有易碎性,要求拾取力度柔和适中。
4.因此,在对玉片进行拾取和粘接工艺处理的生产过程中,如何提高生产效率、降低生产成本,并避免玉片破碎损坏,是目前本领域技术人员亟待解决的技术问题。
技术实现要素:
5.本实用新型的目的在于提供一种玉片点胶粘贴装置,以解决上述背景技术中提出的问题。
6.为实现上述目的,本实用新型提供如下技术方案:
7.一种玉片点胶粘贴装置,包括龙门架、工作台、设备架、供玉系统、点胶系统和贴玉系统;所述龙门架固定在地面上,龙门架下方设有工作台,工作台侧部设有设备架;所述供玉系统包括振动盘和出料轨道,振动盘安装在设备架上,振动盘的出料端连接有出料轨道,出料轨道包括相互连接的倾斜段和水平段,倾斜段的上端与振动盘的出料端连接,倾斜段的下端与水平段连接;所述点胶系统包括点胶机和胶水盘,点胶机安装在设备架底部,点胶机的出胶管连接有胶水盘;所述胶水盘包括胶水支架、主管体和y形管,y形管连接在主管体的顶部,主管体的底部与点胶机的出胶管连接;所述贴玉系统包括两套并联机械手和真空吸盘,并联机械手安装在龙门架上;所述并联机械手包括固定平台、活动平台、动力机构和运动机构;所述固定平台下方设有活动平台,所述固定平台包括两块固定板和立板;所述固定板包括相互固定连接的中心板和三个翼板,三个翼板均位于中心板的外缘处,三个翼板之间互呈120
°
夹角;所述中心板中心处开设有减重孔,减重孔为圆形或其他合适加工且不影响本实用新型正常使用的形状;所述立板设有六块且均为矩形,立板位于两块固定板之间用于固定连接两块固定板,且立板与两块固定板之间相互垂直设置;所述动力机构设有三组,且均安装在固定平台上,三个动力机构之间互呈120
°
夹角;所述运动机构设有三组且分别与动力机构一一对应设置,且三组运动机构呈轴对称均匀分布;所述活动平台的中部固定安装有真空吸盘,真空吸盘设有两组。
8.进一步的,所述点胶机具体为jm-8000型数显点胶机;
9.进一步的,所述主管体通过胶水支架安装在设备架的侧部,胶水支架呈l形;所述胶水支架上通过螺栓还安装有卡座,卡座内开设有卡槽,卡槽用于卡住主管体。
10.进一步的,所述减重孔外围呈圆形阵列设有若干螺纹孔用于将并联机械手安装在龙门架上。
11.进一步的,所述立板的位于两块固定板的翼板之间;所述立板的上下两端通过螺钉或者铆钉与固定板固定连接。
12.进一步的,所述动力机构包括伺服电机、精密减速机和减速机安装板,所述减速机安装板呈矩形,减速机安装板的上下两端与立板固定连接,减速机安装板的左右两端与立板固定连接;伺服电机与精密减速机固定连接,且伺服电机的输出轴驱动连接精密减速机的输入端,精密减速机通过螺栓固定安装在减速机安装板上。
13.进一步的,所述运动机构由一个主动臂和一个从动臂组成,其中从动臂为闭环结构,且该闭环结构与主动臂串联固定,从动臂由四个球形副和杆件组成,因此,可以通过控制伺服电机转动角度的变化来实现活动平台在空间内的三自由度运动;所述主动臂的一端与精密减速机的输出轴固定连接;所述杆件的一端通过球形副与主动臂的另一端转动连接,杆件的一端通过球形副与活动平台转动连接;所述球形副具体为球铰。
14.进一步的,所述杆件的两端还设有紧固件,且紧固件位于两根杆件之间;紧固件包括固定块和拉伸弹簧,拉伸弹簧的两端各固定连接有固定块,固定块通过转轴与杆件转动连接。
15.与现有技术相比,本实用新型的有益效果是:本实用新型通过紧固件能够增加运动支链的动作柔性,减少执行部件因精度或磨损而动作不到位的情况,将对玉片进行拾取和粘接工艺处理的生产过程中,能够代替人工操作对工件进行拾取,并且,其拾取动作精度高、力道适中,能够避免工件破碎损坏;
16.本实用新型相较于采用人工粘胶的方式,更加快捷,提高了工作效率,且无需工人直接接触胶水,减少了对工人的身体伤害。
附图说明
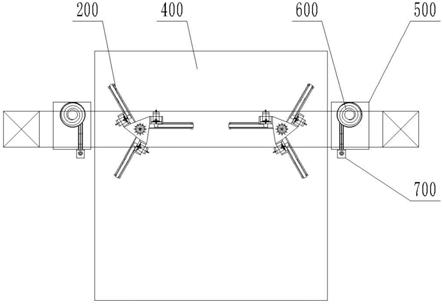
17.图1为一种玉片点胶粘贴装置的俯视图。
18.图2为一种玉片点胶粘贴装置中设备架的结构示意图。
19.图3为一种玉片点胶粘贴装置中胶水盘的结构示意图。
20.图4为一种玉片点胶粘贴装置中卡座的结构示意图。
21.图5为一种玉片点胶粘贴装置的俯视图。
22.图6为一种玉片点胶粘贴装置中运动机构的结构示意图。
23.图7为一种玉片点胶粘贴装置中从动臂的结构示意图。
24.图8为一种玉片点胶粘贴装置固定板的结构示意图。
25.图9为一种玉片点胶粘贴装置动力机构的结构示意图。
26.图10为一种玉片点胶粘贴装置中紧固件的结构示意图。
具体实施方式
27.下面结合具体实施方式对本专利的技术方案作进一步详细地说明。
28.请参阅图1-10,一种玉片点胶粘贴装置,包括龙门架100、工作台400、设备架500、供玉系统、点胶系统和贴玉系统。
29.所述龙门架100固定在地面上,龙门架100下方设有工作台,工作台100侧部设有设备架500;
30.所述供玉系统包括振动盘600和出料轨道610,振动盘600安装在设备架500上,振动盘600的出料端连接有出料轨道610,出料轨道610包括相互连接的倾斜段611和水平段612,倾斜段611的上端与振动盘600的出料端连接,倾斜段611的下端与水平段612连接;
31.所述点胶系统包括点胶机700和胶水盘800,点胶机700安装在设备架500底部,其中点胶机700具体为jm-8000型数显点胶机;点胶机700的出胶管连接有胶水盘800;所述胶水盘800包括胶水支架803、主管体801和y形管802,y形管802连接在主管体801的顶部,主管体801的底部与点胶机700的出胶管连接;所述主管体801通过胶水支架803安装在设备架500的侧部,胶水支架803呈l形;
32.进一步的,所述胶水支架803上通过螺栓还安装有卡座804,卡座804内开设有卡槽805,卡槽805用于卡住主管体801;
33.所述贴玉系统包括两套并联机械手200和真空吸盘300,并联机械手200安装在龙门架100上;所述并联机械手200包括固定平台210、活动平台220、动力机构230和运动机构240;
34.所述固定平台210下方设有活动平台220;
35.所述固定平台210包括两块固定板211和立板212;
36.所述固定板211包括相互固定连接的中心板201和三个翼板202,三个翼板202均位于中心板201的外缘处,三个翼板202之间互呈120
°
夹角;其中中心板201的内心处开设有减重孔203,减重孔203为圆形或其他合适加工且不影响本实用新型正常使用的形状;
37.进一步的,所述减重孔203外围呈圆形阵列设有若干螺纹孔用于将并联机械手200安装在龙门架100上;
38.所述立板212设有六块且均为矩形,立板212位于两块固定板211之间用于固定连接两块固定板211,且立板212与两块固定板211之间相互垂直设置;
39.具体的,所述立板212的位于两块固定板211的翼板202之间;
40.具体的,所述立板212的上下两端通过螺钉或者铆钉与固定板211固定连接;
41.进一步的,所述立板212的上下两端与固定板211的连接方式为焊接或其他现有的能够将立板212的上下两端与固定板211固定的连接方式;
42.再进一步的,所述立板212与固定板211一体成型;
43.所述活动平台220的中部固定安装有真空吸盘300,真空吸盘300设有两组;
44.所述动力机构230设有三组,且均安装在固定平台210上,三个动力机构之间互呈120
°
夹角;
45.所述动力机构230包括伺服电机231、精密减速机233和减速机安装板232,
46.所述减速机安装板232呈矩形,减速机安装板232的上下两端与立板212固定连接,减速机安装板232的左右两端与立板212固定连接;
47.伺服电机231与精密减速机233固定连接,且伺服电机231的输出轴驱动连接精密减速机233的输入端,精密减速机233通过螺栓固定安装在减速机安装板232上;
48.所述运动机构240设有三组且分别与动力机构230一一对应设置,且三组运动机构呈轴对称均匀分布,
49.所述运动机构240由一个主动臂241和一个从动臂242组成,其中从动臂242为闭环结构,且该闭环结构与主动臂241串联固定,从动臂242由四个球形副2421和杆件2422组成,因此,可以通过控制伺服电机231转动角度的变化来实现活动平台230在空间内的三自由度运动;
50.具体的,所述主动臂241的一端与精密减速机233的输出轴固定连接;
51.所述杆件2422的一端通过球形副2421与主动臂241的另一端转动连接,杆件2422的一端通过球形副2421与活动平台230转动连接;
52.进一步的,所述球形副2421具体为球铰;
53.进一步的,所述杆件2422的两端还设有紧固件250,且紧固件250位于两根杆件2422之间;
54.紧固件250包括固定块251和拉伸弹簧252,拉伸弹簧252的两端各固定连接有固定块251,固定块251通过转轴与杆件2422转动连接;
55.本实用新型中的机械手具有以下优点:
56.负重比大;机构的每条运动链都要承受载荷,因此,在相同的自重情况下,机构较串联机构具有更大的承载能力;
57.刚度大;机构的每条运动链可以分享载荷,同时大多数情况下可以设计其只承受拉成仅受拉力与压力载荷;高的刚度使得每条运动链上的变形都极小,确保了机构上末端执行器的位置精度;
58.惯量低;大多数驱动器直接固定在基座上,如伺服电机是直接固定在固定平台上的,因此机构中需要运动的零部件质量较小;
59.动态性能好;机构中的运动零部件惯性低,质量轻的优势;
60.运动精度高;机构中的误差是由各条运动链均分的,不像串联机构的误差主要来自各个关节误差的累积;因此,机构误差相对较小并保证了运动精度;
61.成本低;机构的大多数零部件都是标准件。
62.本实用新型通过紧固件250能够增加运动机构的动作柔性,减少了活动平台因精度或磨损而产生的动作不到位的情况的发生的概率,将该并联机械手应用于工件拾取工艺处理的生产过程中,能够代替人工操作对工件进行拾取,并且,其拾取动作精度高、力道适中,能够避免工件破碎损坏。
63.所述活动平台220的中部固定安装有真空吸盘300,真空吸盘300设有两组;
64.玉片点胶粘贴方法,包括以下步骤:
65.s1、振动盘出料;
66.s2、机械手取料;
67.s3、点胶机出胶;
68.s4、并联机械手带动玉片到涂胶工位;
69.s5、点胶机点胶;
70.s6、点胶机停止出胶;
71.s7、并联机械手带动玉片到工作台上床垫相应的粘贴工位;
72.s8、并联机械手下压玉片;
73.s9、并联机械手复位。
74.本实用新型相较于采用人工粘胶的方式,更加快捷,提高了工作效率,且无需工人直接接触胶水,减少了对工人的身体伤害。
75.上面对本专利的较佳实施方式作了详细说明,但是本专利并不限于上述实施方式,在本领域的普通技术人员所具备的知识范围内,还可以在不脱离本专利宗旨的前提下做出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1