键盘硅胶粒端面印胶机的制作方法
[0001]
本实用新型涉及键盘导电膜片与键盘硅胶粒贴合生产的领域,具体涉及一种键盘硅胶粒端面印胶机。
背景技术:
[0002]
目前大部分的硅胶键盘在组装生产前,需要先对键盘导电膜片与键盘硅胶粒用胶水粘贴贴合,其粘贴做法都是先用丝印机在键盘导电膜片上印上胶水,然后把印了胶水的键盘导电膜片与摆放在模板上的键盘硅胶粒进行贴合,这种做法有如下缺点:
[0003]
缺点一,用丝印机在所述键盘导电膜片上丝印时,需要先把所述键盘导电膜片移放到丝印机上的丝印底座并定位,然后丝印网板下降靠近所述键盘导电膜片,接着刮刀在丝印网板上刮胶水,再接着丝印网板上升离开所述键盘导电膜片,再接着把印上了胶水的所述键盘导电膜片移送到摆满键盘硅胶粒的模板上。以上动作过程,累计时间多,目前实际生产中通常需要5秒到8秒完成一片,相当于一小时只能丝印400 片到650片,其中小膜片速度会快些,最快每小时可做到700片;而大膜片速度会较慢,有的每小时只能做到300多片;而特大膜片每小时只能做到200多片。以上生产效率低,不能满足实际生产的效率要求。
[0004]
缺点二,用丝印机在所述键盘导电膜片上丝印,目前实际生产中基本上都是一次丝印一片膜片,因而无法提高生产效率。也曾经有的工厂尝试一次丝印二片膜片,但实际操作过程中,发现二片膜片的上料及取料要占用很多时间,并不能提高效率,而且在丝印底座上同时对二片膜片定位不易准确。而如果要一次丝印三片或四片或五片或更多片膜片,占用的时间则更多,在丝印底座上同时对多片膜片进行定位十分困难。
[0005]
缺点三,由于丝印存在误差,为了补偿误差,目前工厂的做法是使丝印胶水面积比所述键盘硅胶粒端面的面积大些,这样就造成了胶水的浪费,增加了胶水材料成本。
[0006]
缺点四,键盘硅胶粒端面是有排气缺口的,所述排气缺口部分是粘不上胶水的,但由于所述键盘硅胶粒与所述键盘导电膜片粘贴时,所述排气缺口的朝向是随机的,因此目前工厂的做法是在所述键盘导电膜片上对应位置、包括对应所述排气缺口部分也印上胶水,这样就造成了胶水的浪费,增加了胶水材料成本。
[0007]
缺点五,所述键盘导电膜片通常是由三片子膜片叠在一起组成的,其中第一种情况:所述三片子膜片是完全贴合在一起的整合键盘导电膜片;而另外第二种情况:所述三个子膜片不是贴合成一个整体,而是仅由几个熔接点连接的非整合键盘导电膜片。对于所述非整合键盘导电膜片,在丝印底座只能真空吸住最下面的子膜片,而最上面的子膜片则被丝印网板上的胶水粘着带起,因此无法实现自动丝印;而且对于所述非整合键盘导电膜片,也无法用真空吸的办法实现自动上料和自动取料,因此无法实现全工序的全自动化生产。
技术实现要素:
[0008]
本实用新型要解决的技术问题是提供一种键盘硅胶粒端面印胶机,其能实现印胶高效率、印胶自动化、节省胶水材料成本。
[0009]
对于本实用新型的键盘硅胶粒端面印胶机,上述问题是这样加以解决的:该键盘硅胶粒端面印胶机包括机架,在所述机架上设置有涂胶机构、模板机构、匀胶机构,所述涂胶机构包括涂胶件,所述涂胶件上有涂胶面;所述模板机构上放置有模板,所述模板上开设有与键盘按键对应的模板定位孔,所述模板定位孔用于摆放并定位键盘硅胶粒;通过所述匀胶机构在所述涂胶面上涂上均匀的薄层胶水;所述涂胶面与所述键盘硅胶粒的端面接触再分离,把所述涂胶面上的薄层胶水粘印到所述键盘硅胶粒的端面。
[0010]
优选地,所述涂胶机构在所述模板机构的上方位置。或者,优选地,所述涂胶机构在所述模板机构的下方位置。
[0011]
优选地,所述涂胶机构为a传送平带涂胶机构,所述a传送平带涂胶机构包括装设于a机架上的a传送框架、与所述a传送框架转动连接的a主动轴组件、与所述a主动轴组件连接的a传送带驱动单元、与所述a传送框架转动连接的a从动轴组件,在所述a主动轴组件与所述a从动轴组件之间围设有a传送平带;所述a传送平带为a涂胶件。在所述a传送平带涂胶机构的上方设置有a匀胶机构,优选地所述a匀胶机构采用a刮胶机构。在所述a传送平带上放上胶水,然后所述a传送带驱动单元驱动所述a传送平带移动,所述a传送平带上的胶水也跟着移动,再通过所述a刮胶机构,使所述a传送平带上留下一薄层胶水。
[0012]
优选地,在所述a主动轴组件、所述a从动轴组件之间还设置有a乙空腔组件,所述a乙空腔组件被所述a传送平带包围;a乙空腔组件上开设有a1孔;a乙空腔组件上开设有a2孔。其中a1孔用于接通真空,所述真空流通到所述a2孔,通过a2孔上的真空把所述传送平带吸住。
[0013]
优选地,所述涂胶机构为b翻转涂胶机构,所述b翻转涂胶机构包括b涂胶件、b翻转驱动单元,所述b涂胶件为b翻转平板,所述b翻转平板的外表面为b翻转平板涂胶面;所述b翻转驱动单元驱动所述 b翻转平板在0度与180度位置之间转动。
[0014]
优选地,所述涂胶机构为c摆转涂胶机构,所述c摆转涂胶机构包括c涂胶件、c摆转驱动单元,所述c涂胶件为c摆转平板,所述c摆转平板上的外表面为c摆转平板涂胶面,所述c摆转驱动单元驱动所述c摆转平板在0度与180度位置之间摆动。
[0015]
优选地,所述涂胶机构为d圆筒涂胶机构,所述d圆筒涂胶机构包括d圆筒、d平板、d胶水容器,所述d平板的下表面为d平板涂胶面;d胶水容器内放上胶水,通过d圆筒的转动,把所述胶水粘上带到所述d平板涂胶面上。
[0016]
优选地,所述模板机构采用e模板机构,所述涂胶机构采用e平板涂胶机构;所述e模板机构设置于所述e平板涂胶机构的上方;所述e模板机构包括e甲空腔组件、e翻转驱动单元,所述e甲空腔组件上开设有e气孔;所述e甲空腔组件上设置有模板,所述模板上的所述模板定位孔内摆放有键盘硅胶粒;所述e翻转驱动单元驱动所述e甲空腔组件及设置于其上的模板在0度与180度位置之间翻转;所述e气孔用于接通真空,把所述模板上的所述模板定位孔内的所述键盘硅胶粒吸住,防止所述键盘硅胶粒在以上翻转过程中掉落。
[0017]
优选地,所述匀胶机构采用刮胶机构,通过刮胶机构在所述涂胶面上留下一薄层胶水。优选地,所述模板机构还包括甲空腔组件,所述甲空腔组件上开设有气孔。所述模板机构上放置模板,所述模板上开设有与键盘按键位置对应的模板定位孔,所述模板定位孔内摆满键盘硅胶粒。
[0018]
驱动所述模板机构或驱动所述涂胶机构,使所述模板机构上的所述模板上的所述
模板定位孔内的所述键盘硅胶粒的端面与所述涂胶机构上的所述涂胶面上的薄层胶水接触,然后所述甲空腔组件上的所述气孔接通真空,把所述模板定位孔内的硅胶粒吸住。接着再驱动所述模板机构或所述涂胶机构,使所述模板机构上的所述键盘硅胶粒与所述涂胶面分离,再接着断开所述气孔的真空,这样就在所述键盘硅胶粒的端面粘印上了胶水。
[0019]
最后,把以上已经粘印有胶水的所述键盘硅胶粒随所述模板送到下工序与键盘导电膜片贴合。
[0020]
本实用新型键盘硅胶粒端面印胶机的有益效果是:(1)由于所述模板上的所述模板定位孔内的所述键盘硅胶粒的端面与所述涂胶件上的所述涂胶面接触、再分离,就可以在所述键盘硅胶粒的端面粘印上胶水,动作时间很少,因而可以显著提高印胶的效率。使用这种键盘端面印胶机生产,一小时可以印胶2000 组(备注:一组指一片键盘导电膜片所要粘的硅胶粒,对应一个键盘的所有按键),其印胶效率远远高于目前每小时400到650片的丝印效率。(2)可以一次同时印多组,进一步提高了印胶效率。(3)由于是直接印胶水到所述键盘硅胶粒的端面上,所述键盘硅胶粒的端面排气缺口没粘上胶水,也不需要象目前丝印那样加大丝印面积,因此避免了胶水的浪费,减少了胶水材料成本。(4)由于是直接印胶水到所述键盘硅胶粒的端面上,而不是丝印到键盘导电膜片上,也就没有所述非整合键盘导电膜片无法真空吸的限制,因此有利于实现全自动印胶,节省人工。
附图说明
[0021]
下面结合附图所述的实施方式对本实用新型键盘硅胶粒端面印胶机作进一步详细说明:
[0022]
图1是本实用新型的模板与键盘硅胶粒组装的分解立体结构示意图;
[0023]
图2是图1中a处的放大图;
[0024]
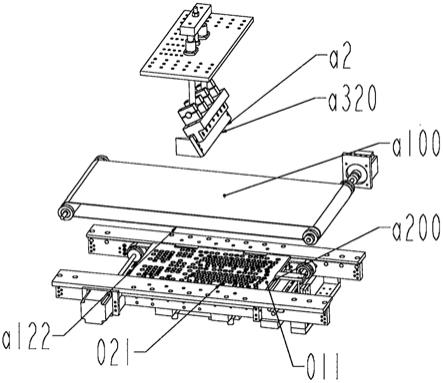
图3是本实用新型的第一种实施方式采用a传送平带涂胶机构的键盘硅胶端面粒印胶机的立体结构示意图;
[0025]
图4是本实用新型的第一种实施方式采用a传送平带涂胶机构的键盘硅胶粒端面印胶机的剖视立体结构示意图;
[0026]
图5是本实用新型的第一种实施方式采用a传送平带涂胶机构的键盘硅胶粒端面印胶机的另一剖视立体结构示意图;
[0027]
图6是本实用新型的第一种实施方式的a传送平带涂胶机构、a刮胶机构的相互位置关系的立体结构示意图;
[0028]
图7是本实用新型的第一种实施方式的a传送平带涂胶机构、a刮胶机构、a模板机构的相互位置关系的分解立体结构示意图;
[0029]
图8是本实用新型的第一种实施方式的a传送平带涂胶机构、a刮胶机构、a模板机构的相互位置关系的简化立体结构示意图;
[0030]
图9是本实用新型的第一种实施方式的a传送平带涂胶机构、a刮胶机构、a模板机构的相互位置关系的简化分解立体结构示意图;
[0031]
图10是本实用新型的第一种实施方式的a传送平带涂胶机构、a刮胶机构、a模板机构的相互位置关系的简化平面示意图;
[0032]
图11是本实用新型的第一种实施方式的a传送平带涂胶机构、a刮胶机构、a模板机
构的相互位置关系的简化分解平面示意图;
[0033]
图12是本实用新型的第一种实施方案的a刮胶机构的立体结构示意图;
[0034]
图13是本实用新型的第一种实施方案的a刮胶机构的另一视角立体结构示意图;
[0035]
图14是本实用新型的第一种实施方式的a传送平带涂胶机构的立体结构示意图;
[0036]
图15是本实用新型的第一种实施方式的a传送平带涂胶机构的另一视角的立体结构示意图;
[0037]
图16是本实用新型的第一种实施方式的a传送平带涂胶机构的另一视角的简化的立体结构示意图;
[0038]
图17是本实用新型的第一种实施方式的a乙空腔组件的立体结构示意图;
[0039]
图18是本实用新型的第一种实施方式的a传送平带涂胶机构与a乙空腔组件的相互位置关系的立体结构示意图;
[0040]
图19是本实用新型的第一种实施方式的a模板机构的立体结构示意图;
[0041]
图20是本实用新型的第一种实施方式的a模板机构的另一视角的立体结构示意图;
[0042]
图21是本实用新型的第一种实施方式的a模板机构的分解立体结构示意图;
[0043]
图22本实用新型的第一种实施方式的a模板机构的另一视角的分解立体结构示意图;
[0044]
图23是本实用新型的第二种实施方式采用b翻转涂胶机构的键盘硅胶粒端面印胶机的立体结构示意图;
[0045]
图24是本实用新型的第二种实施方式采用b翻转涂胶机构的键盘硅胶粒端面印胶机的剖视立体结构示意图;
[0046]
图25是本实用新型的第二种实施方式的b模板机构、b翻转涂胶机构、b刮胶机构、b侧翼机构的相互位置关系的立体结构示意图;
[0047]
图26是本实用新型的第二种实施方式的b刮胶机构及b移动机构的立体结构示意图;
[0048]
图27是本实用新型的第二种实施方式的b刮胶机构的立体结构示意图;
[0049]
图28是本实用新型的第二种实施方式的b翻转涂胶机构、b侧翼机构的相互位置关系的立体结构示意图;
[0050]
图29是本实用新型的第二种实施方式的b翻转涂胶机构的立体结构示意图;
[0051]
图30是本实用新型的第二种实施方式的b侧翼机构的立体结构示意图;
[0052]
图31是本实用新型的第二种实施方式的b侧翼机构的另一视角的立体结构示意图;
[0053]
图32是本实用新型的第二种实施方式的b模板机构及b模板升降单元的立体结构示意图;
[0054]
图33是本实用新型的第二种实施方式的b模板机构及b模板升降单元的另一视角的立体结构示意图;
[0055]
图34是本实用新型的第二种实施方式的b模板机构的立体结构示意图;
[0056]
图35是本实用新型的第二种实施方式的b模板机构的分解立体结构示意图;
[0057]
图36是本实用新型的第三种实施方式采用c摆转涂胶机构的键盘硅胶粒端面印胶
机,其c摆臂在0 度位置时的立体结构示意图;
[0058]
图37是本实用新型的第三种实施方式采用c摆转涂胶机构的键盘硅胶粒端面印胶机,其c摆臂在180 度位置时的立体结构示意图;
[0059]
图38是本实用新型的第三种实施方式采用c摆转涂胶机构的键盘硅胶粒端面印胶机,其c摆臂在0 度位置时的部分机构的相互位置关系的立体结构示意图;
[0060]
图39是本实用新型的第三种实施方式采用c摆转涂胶机构的键盘硅胶粒端面印胶机,其c摆臂在0 度位置时的部分机构的相互位置关系的立体结构示意图;
[0061]
图40是本实用新型的第三种实施方式采用c摆转涂胶机构的键盘硅胶粒端面印胶机,其c摆臂在180 度位置时的部分机构的相互位置关系的立体结构示意图;
[0062]
图41是本实用新型的第三种实施方式采用c摆转涂胶机构的键盘硅胶粒端面印胶机,其c摆臂在180 度位置时的部分机构的相互位置关系的另一视角的立体结构示意图;
[0063]
图42是本实用新型的第三种实施方式采用c摆转涂胶机构的键盘硅胶粒端面印胶机,其c摆臂在0 度位置时的部分机构的相互位置关系的立体结构示意图;
[0064]
图43是本实用新型的第三种实施方式采用c摆转涂胶机构的键盘硅胶粒端面印胶机,其c摆臂在180 度位置时的部分机构的相互位置关系的立体结构示意图;
[0065]
图44是本实用新型第三种实施方式的c模板机构的分解立体结构示意图;
[0066]
图45是本实用新型第三种实施方式的c模板机构的另一视角的立体结构示意图;
[0067]
图46是本实用新型的第四种实施方式采用d圆筒涂胶机构的键盘硅胶粒端面印胶机的立体结构示意图;
[0068]
图47是本实用新型的第四种实施方式采用d圆筒涂胶机构的键盘硅胶粒端面印胶机的另一立体示意图;
[0069]
图48是本实用新型的第四种实施方式的各机构相互位置关系的立体结构示意图;
[0070]
图49是本实用新型的第四种实施方式的各机构相互位置关系的另一立体结构示意图;
[0071]
图50是本实用新型的第四种实施方式的d圆筒涂胶机构与d刮胶机构相互位置关系的剖视立体结构示意图;
[0072]
图51是本实用新型的第四种实施方式的d圆筒涂胶机构与d刮胶机构相互位置关系的另一视角的剖视立体结构示意图;
[0073]
图52是本实用新型的第四种实施方式的d圆筒涂胶机构与d刮胶机构的相互位置关系的立体结构示意图;
[0074]
图53是本实用新型的第四种实施方式的d圆筒涂胶机构与d刮胶机构的相互位置关系的立体结构示意图;
[0075]
图54是本实用新型的第四种实施方式的d圆筒涂胶机构与d刮胶机构的相互位置关系的分解立体结构示意图;
[0076]
图55是本实用新型的第四种实施方式的d圆筒涂胶机构与d刮胶机构的相互位置关系的另一视角的分解立体结构示意图;
[0077]
图56是本实用新型的第四种实施方式的d刮胶机构与d平板的相互位置关系的立体结构示意图;
[0078]
图57是本实用新型的第四种实施方式的d刮胶机构的立体结构示意图;
[0079]
图58是本实用新型的第四种实施方式的d模板机构的分解立体结构示意图;
[0080]
图59是本实用新型的第四种实施方式的d模板机构的另一视角的立体结构示意图;
[0081]
图60是本实用新型的第五种实施方式的键盘硅胶粒端面印胶机的立体结构示意图;
[0082]
图61是本实用新型的第五种实施方式的各机构相互位置关系的立体结构示意图;
[0083]
图62是本实用新型的第五种实施方式的各机构相互位置关系的另一立体结构示意图;
[0084]
图63是本实用新型的第五种实施方式的e模板机构的立体结构示意图。
具体实施方式
[0085]
为使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型键盘硅胶粒端面印胶机进行进一步详细说明。应当说明,此处所描述的具体实施例仅仅用于解释本实用新型,并不用于限定此实用新型。
[0086]
说明1:以下名称前缀大写字母,a代表第一实施例,b代表第二实施例,c代表第三实施例,d代表第四实施例,e代表第五实施例。例如:“a传送平带”是指“第一实施例的传送平带”、“a刮刀”是指“第一实施例的刮刀”、“a3固定件”是指“第一实施例的第三固定件”、“b翻转涂胶机构”是“指第二实施例的翻转涂胶机构”、“e2固定板”是指“第五实施例的第二固定板”,其余以此类推。
[0087]
说明2:以下标号的前缀小写字母,a代表第一实施例的标号,b代表第二实施例的标号,c代表第三实施例的标号,d代表第四实施例的标号,e代表第五实施例的标号。例如:“a1”指“第一实施例的机架”,“b3”指“第二实施例的b涂胶件”,“c1”指“第三实施例的机架”,“d1”指“第四实施例的机架”,“e200”指“第五实施例的e模板机构”,其余以此类推。
[0088]
说明3:机架是a机架a1、b机架b1、c机架c1、d机架d1、e机架e1的上位概括;
[0089]
涂胶机构是a传送平带涂胶机构a100、b翻转涂胶机构b100、c摆转涂胶机构c100、d圆筒涂胶机构 d100、e平板涂胶机构e100的上位概括;
[0090]
模板机构是a模板机构a200、b模板机构b200、c模板机构c200、d模板机构d200、e模板机构e200 的上位概括;
[0091]
匀胶机构是a匀胶机构a2、b匀胶机构b2、c匀胶机构c2、d匀胶机构d2、e匀胶机构e2的上位概括;
[0092]
涂胶件是a涂胶件a3、b涂胶件b3、c涂胶件c3、d涂胶件d3、e涂胶件e3的上位概括;
[0093]
涂胶面是a平带涂胶面a122、b翻转平板涂胶面b122、c摆转平板涂胶面c122、d平板涂胶面d122、 e平板涂胶面e122的上位概括;
[0094]
甲空腔组件是a甲空腔组件a220、b甲空腔组件b220、c甲空腔组件c220、d甲空腔组件d220、e甲空腔组件e220的上位概括;
[0095]
气孔是a气孔a221、b气孔b221、c气孔c221、d气孔d221、e气孔e221的上位概括;
[0096]
刮胶机构是a刮胶机构a320、b刮胶机构b310、c刮胶机构c310、d刮胶机构d310、e刮胶机构e310 的上位概括。
[0097]
实施例一:如图1到图22,涂胶机构采用a传送平带涂胶机构a100的本实用新型的
键盘硅胶粒端面印胶机,包括a机架a1,所述a机架a1上设置有a传送平带涂胶机构a100、a匀胶机构a2、a模板机构 a200,所述a传送平带涂胶机构a100包括a涂胶件a3,优选地所述a匀胶机构a2采用a刮胶机构a320,所述a刮胶机构a320架设在所述a传送平带涂胶机构a100的上面,所述a模板机构a200设置在所述a 传送平带涂胶机构a100的下面。
[0098]
所述a传送平带涂胶机构a100包括装设于所述a机架a1上的a传送框架a133、与所述a传送框架 a133转动连接的a主动轴组件a131、与所述a主动轴组件a131连接的a传送带驱动单元a134、与所述 a传送框架a133转动连接的a从动轴组件a132,在所述a主动轴组件a131与所述a从动轴组件a132之间围设有a传送平带a121;所述a涂胶件a3为a传送平带a121;优选地所述a传送带驱动单元a134采用a传送带电机a135。所述a传送带电机a135转动时,驱动所述a传送平带a121移动。
[0099]
在所述a主动轴组件a131、所述a从动轴组件a132之间还设置有a乙空腔组件a140,所述a乙空腔组件a140被所述a传送平带a121包围;a乙空腔组件a140上开设有a1孔a141;a乙空腔组件a140 上开设有a2孔a142。
[0100]
在所述a传送平带a121的上方,还架设有a匀胶机构a2。优选地,所述a匀胶机构a2采用a刮胶机构a320。所述a刮胶机构a320包括a刮刀架a330,所述a刮刀架a330上设置有a刮刀a331,在所述 a刮刀a331的二端还设置有a防漏件a332。所述a刮胶机构a320还包括a1调整机构a310,所述a1调整机构a310包括a1固定板a311、a1滑块a312、a1导轨a313、a1螺杆单元a314;所述a1固定板a311 固定在所述a机架a1上,所述a1滑块a312固定在所述a1固定板a311上,所述a1导轨a313与所述 a1滑块a312滑动联接,所述a1导轨a313的一端与所述a刮刀架a330固定连接。通过旋拧所述a1螺杆单元a314,可以调整所述a刮刀a331与所述a传送平带a121上段外表面之间的间隙。
[0101]
如图8、图9、图10、图11,在所述a传送平带a121的上段外表面、位于所述a刮刀a331的左侧,是a胶水置放区a123,用于放上胶水。当所述a传送带电机a135驱动所述a传送平带a121移动,所述 a传送平带a121的上段按图8的视角从左向右移动,由于有所述a刮刀a331的阻隔,因此所述a胶水置放区a123的胶水只有一部分通过所述a刮刀a331与所述a传送平带a121上段外表面之间的间隙,在所述a传送平带a121的上段外表面、位于所述a刮刀a331的右侧形成一薄层胶水,而其余胶水则被所述a 刮刀a331阻隔在所述a胶水置放区a123,所述a防漏件a332可以防止胶水从a刮刀a331二端漏出。通过旋拧所述a1螺杆单元a314,调整所述a刮刀a331与所述a传送平带a121上段外表面之间的间隙,可以调整以上薄层胶水的厚度。当以上所述a传送带电机a135驱动所述a传送平带a121继续按原方向移动,所述薄层胶水就跟随所述a传送平带a121移到图10、图11所示的a平带涂胶区a124,这时,所述a平带涂胶区a124的a传送平带a121下段外表面就是a平带涂胶面a122。
[0102]
如图19、图20、图21、图22,所述a模板机构a200包括a甲空腔组件a220、a模板升降单元a230,所述a甲空腔组件a220上开设有a气孔a221;所述a模板升降单元a230包括a2固定件a231、a3固定件a234、a2滑块a232、a2导轨a233、a模板升降驱动单元a235,优选地所述a模板升降驱动单元a235 采用a模板升降气缸a236;所述a2滑块a232固定在所述a2固定件a231上,所述a2导轨a233与所述 a2滑块a232滑动连接,所述a2导轨a233的一端与所述a甲空腔组件a220固定连接;所述a3固定件 a234与a2固定件a231固定连接,所述a模板升降气缸a236的活塞杆与所述a3固定件a234固定连接,所述a模板升降气缸a236的缸体与所述a甲空
腔组件a220固定连接;所述a模板机构a200还包括模板 011,所述模板011上开设有模板定位孔012,所述模板011上的模板定位孔012摆满键盘硅胶粒021,所述模板011放置在所述a甲空腔组件a220上;所述a模板升降气缸a236驱动所述a甲空腔组件a220及放置于其上的所述模板011上升或下降,从而使所述模板011及其定位孔内的键盘硅胶粒021贴近或离开所述a平带涂胶面a122。
[0103]
工作过程如下:
[0104]
首先在所述a胶水置放区a123放上胶水,并且旋拧所述a1螺杆单元a314,调整所述a刮刀a331与所述a传送平带a121上段外表面之间的间隙;然后所述a传送带电机a135驱动所述a传送平带a121按图8视角,所述a传送平带a121的上段从左往右移动,所述a胶水置放区a123上的所述胶水中有一部分从所述a刮刀a331与所述a传送平带a121上段外表面之间的间隙经过,在所述a刮刀a331的右侧形成薄层胶水,而另一部分胶水则被a刮刀a331阻隔在所述a胶水置放区a123,同时所述a防漏件a332可以防止所述胶水从所述a刮刀a331的二端漏出;所述a传送平带a121继续按上面所述方向移动,所述薄层胶水就跟随所述a传送平带a121移到图10、图11所示的a平带涂胶区a124,这时,所述a平带涂胶区a124的a传送平带a121下段外表面就是a平带涂胶面a122,到此,所述a传送带电机a135暂停,所述a传送平带a121也跟着暂停。
[0105]
接着,所述a模板升降气缸a236驱动所述a甲空腔组件a220及置放于其上的所述模板011上升,使摆放在所述模板定位孔012内的所述键盘硅胶粒021的端面贴近所述a平带涂胶面a122,此时所述键盘硅胶粒021端面就粘上了胶水。
[0106]
优选地,接着,所述a甲空腔组件a220上的所述a气孔a221接上压缩气体,把所述模板定位孔012 内的所述键盘硅胶粒021吹动,从而使所述键盘硅胶粒021的端面与所述a平带涂胶面a122更可靠地接触。
[0107]
接着,所述a甲空腔组件a220上的所述a气孔a221关闭压缩气体,切换到真空,把所述键盘硅胶粒 021吸紧到所述模板定位孔012内、并把所述模板011吸紧在所述a甲空腔组件a220上面。
[0108]
优选地,接着,所述a乙空腔组件a140上的所述a1孔a141接上真空,真空通过所述a2孔a142,把所述a传送平带a121的下段吸牢固。
[0109]
接着,所述a模板升降气缸a236驱动所述a甲空腔组件a220及吸紧于其上的所述模板011下降,吸紧在所述模板定位孔012内的键盘硅胶粒021也跟着一起下降,与所述a平带涂胶面a122分离。在这个分离过程中,由于a传送平带a121的下段已经被所述a乙空腔组件a140内的真空吸牢固,因此所述a 传送平带a121的下段不会被胶水粘力拉变形。
[0110]
当以上分离完成后,接着,所述a甲空腔组件a220断掉真空,所述a乙空腔组件a140也断掉真空。
[0111]
这样,所述模板定位孔012内的所述键盘硅胶粒021的端面就粘上了胶水。
[0112]
接着,所述a传送带电机a135再次转动,驱动所述a传送平带a121按图8视角,所述a传送平带 a121的上段从左往右移动;同时,把所述a甲空腔组件a220上面的所述模板011及其定位孔内的所述键盘硅胶粒021移到下工序,再把另一模板011及其定位孔内的所述键盘硅胶粒021移到所述a甲空腔组件 a220上面,开始下一次印胶循环。
[0113]
应该说明,以上实施例一的结构,如果把所述a传送平带涂胶机构a100与所述a模
板机构a200的相互位置变换,即把所述a模板机构a200翻转180度、并设置于所述a传送平带涂胶机构a100的上面,属于等同替换,属于本实用新型专利的保护范围。
[0114]
应该说明,以上实施例一的结构,如果把所述a刮胶机构a320改为丝印机构或其它可以在所述a平皮带上涂上一薄层胶水的机构,都属于等同替换,属于本实用新型专利的保护范围。
[0115]
实施例二:如图23到图35,涂胶机构采用b翻转涂胶机构b100的本实用新型的键盘硅胶粒端面印胶机,包括b机架b1,所述b机架b1上设置有b翻转涂胶机构b100、b匀胶机构b2、b模板机构b200,所述b翻转涂胶机构b100包括b涂胶件b3,优选地所述b匀胶机构b2采用b刮胶机构b310;所述b刮胶机构b310架设在所述b翻转涂胶机构b100的上面,所述b模板机构b200设置在所述b翻转涂胶机构 b100的下面。
[0116]
如图28、图29,所述b翻转涂胶机构b100包括b涂胶件b3、b翻转轴承座单元b123、b翻转转轴 b124、b翻转驱动单元b131、b翻转连接件b133、b5固定板b134,所述b涂胶件b3为b翻转平板b121,所述b翻转平板b121的外表面是b翻转平板涂胶面b122,优选地所述b翻转驱动单元b131采用b翻转电机b132。
[0117]
所述b翻转电机b132连接减速机,所述减速机的机体与b5固定板b134固定连接,所述减速机的出力轴与所述b翻转转轴b124固定连接,所述b5固定板b134与所述b机架b1固定连接;或者不使用减速机,而是所述b翻转电机b132的机体与b5固定板b134固定连接,所述b翻转电机b132的转轴与所述b翻转转轴b124连接。
[0118]
所述b翻转转轴b124与所述b翻转轴承座单元b123转动连接,所述b翻转轴承座单元b123的体部与所述b5固定板b134固定连接。所述b翻转转轴b124与所述b翻转连接件b133固定连接,所述b翻转连接件b133与所述b翻转平板b121固定连接。
[0119]
所述b翻转电机b132驱动所述b翻转转轴b124及固定连接于其上的b翻转连接件b133、b翻转平板b121在0度与180度之间转动,这样,原先在上的所述b翻转平板b121就转到了下面,相应地,原先朝上的所述b翻转平板涂胶面b122转到了朝下面。所述b翻转平板b121可以对称设置为二个,也可以只设置一个。
[0120]
如图25、图28、图30、图31,所述b翻转涂胶机构b100的二侧分别设置有b侧翼机构b900,所述 b侧翼机构b900包括b侧翼平板b911、b侧翼滑块b912、b侧翼导轨b913、b侧翼导轨固定件b914、b 侧翼连接件一b915、b侧翼连接件二b916、b侧翼驱动单元b921,优选地所述b侧翼驱动单元b921采用 b侧翼气缸b922;所述b侧翼平板b911与所述b侧翼滑块b912固定连接,所述b侧翼导轨b913与所述 b侧翼滑块b912滑动连接,所述b侧翼导轨b913固定在所述b侧翼导轨固定件b914上,所述b侧翼导轨固定件b914与所述b侧翼连接件一b915固定连接,所述b侧翼连接件一b915与所述b侧翼连接件二 b916固定连接;所述b侧翼连接件二b916则固定在所述b5固定板b134上;所述b侧翼气缸b922的缸体与所述b侧翼连接件一b915固定连接,所述b侧翼气缸b922的活塞轴则与所述b侧翼平板b911固定连接。所述b侧翼气缸b922驱动所述b侧翼平板b911贴近或离开所述b翻转平板b121。
[0121]
如图24、图25、图26、图27,在所述b翻转涂胶机构b100的上方,还设置有b匀胶机构b2。优选地,所述b匀胶机构b2采用b刮胶机构b310。所述b刮胶机构b310包括b刮刀架b316,所述b刮刀架 b316上设置有b刮刀b317。所述b刮胶机构b310还包括b4固定件b311、b刮刀升降滑块b312、b刮刀升降导轨b313、b刮刀升降驱动单元b314;优选地,所述b刮刀升降驱动单
元b314采用b刮刀升降气缸 b315。所述b升降滑块固定在所述b4固定件b311上,所述b刮刀升降导轨b313与所述b刮刀升降滑块 b312滑动连接,所述b升降导轨与所述b刮刀架b316固定连接,所述b刮刀升降气缸b315的缸体与所述b4固定件b311固定连接,所述b刮刀升降气缸b315的活塞轴与所述b刮刀架b316固定连接;所述b 刮刀升降气缸b315驱动所述b刮刀架b316下降或上升,使所述b刮刀b317靠近或离开所述b翻转平板 b121。所述b刮胶机构b310设置有左右二组。
[0122]
所述b刮胶机构b310还连接有b移动机构b320,所述b移动机构b320包括b刮胶滑块b323、b刮胶导轨b322、b刮胶驱动单元b324、b3固定件b321;优选地,所述b刮胶驱动单元b324采用b刮胶气缸b325。所述b刮胶滑块b323固定在所述b刮胶机构b310上的所述b4固定件b311上,所述b刮胶滑块b323与所述b刮胶导轨b322滑动连接,所述b刮胶导轨b322固定在所述b3固定件b321上,所述b 刮胶气缸b325的缸体与所述b3固定件b321固定连接,所述b刮胶气缸b325的活塞轴与所述b刮胶机构b310上的所述b4固定件b311固定连接。所述b刮胶气缸b325驱动所述b刮胶机构b310向左移动或向右移动(按图25的视角)。
[0123]
如图24、图25、图32、图33、图34、图35,所述b模板机构b200包括b甲空腔组件b220,所述b 甲空腔组件b220上开设有b气孔b221;所述b模板机构b200连接有b模板升降组件b230,所述b模板升降组件b230包括b1固定件b231、b2固定件b234、b模板升降滑块b232、b模板升降导轨b233、b模板升降驱动单元b235,优选地所述b模板升降驱动单元b235采用b模板升降气缸b236;所述b模板升降滑块b232与所述b模板机构b200连接;所述b模板升降滑块b232与所述b模板升降导轨b233滑动连接,所述b模板升降导轨b233与所述b1固定件b231固定连接,所述b1固定件b231与所述b2固定件b234固定连接;所述b模板升降气缸b236的缸体与所述b2固定件b234固定连接,所述b模板升降气缸b236的活塞轴与所述b模板机构b200连接;所述b模板机构b200还包括模板011,所述模板011 上开设有模板定位孔012,所述模板011上的模板定位孔012摆满键盘硅胶粒021,所述模板011放置在所述b甲空腔组件b220上。所述b模板升降气缸b236驱动所述b模板机构b200及其上的b甲空腔组件b220上升或下降。
[0124]
工作过程及工作原理如下:
[0125]
首先调整所述b翻转涂胶机构b100,使所述b翻转平板b121在上,使所述b翻转平板涂胶面b122 朝上;然后调整所述b刮胶机构b310,使所述b刮刀架b316下降到最下面时,所述b刮刀b317与所述 b翻转平板涂胶面b122之间有合适的间隙;接着左右b侧翼气缸b922分别驱动左右b侧翼平板b911靠近所述b翻转平板b121。
[0126]
接着,所述b刮胶气缸b325驱动所述b刮胶机构b310移动到左b侧翼机构b900(或者先移到右b 侧翼机构b900,原理相同),然后所述左b刮刀升降气缸b315驱动所述左b刮刀架b316下降使左b刮刀b317靠近左b侧翼平板b911,同时所述右b刮刀升降气缸b315驱动所述右b刮刀架b316上升使右b 刮刀b317离开左b侧翼平板b911。然后,在所述左b侧翼平板b911上,位于所述左b刮刀b317与右b 刮刀b317之间,放上胶水。
[0127]
然后所述b刮胶气缸b325驱动所述b刮胶机构b310向右移动、经过所述b翻转平板涂胶面b122、到达右b侧翼平板b911的上面,以上过程中由于所述左b刮刀b317与所述b翻转平板涂胶面b122之间有少量的间隙,因此就会在所述b翻转平板涂胶面b122上留有一薄层胶水,而多余的胶水则被左b刮刀 b317带到右b侧翼平板b911。
[0128]
接着,所述左右b侧翼气缸b922分别驱动所述左右b侧翼平板b911与所述b翻转平
板b121分离。
[0129]
接着,所述b翻转电机b132驱动所述b翻转涂胶机构b100翻转180度,使所述b翻转平板涂胶面b122朝下,此时,所述b翻转平板涂胶面b122与所述b模板机构b200上的所述模板011上的所述模板定位孔012内的键盘硅胶粒021相对。
[0130]
接着,所述b模板升降气缸b236驱动所述b模板机构b200及置放于其上的所述模板011上升,当上升到尽头时,所述模板011的所述模板定位孔012内的键盘硅胶粒021的端面与所述b翻转平板涂胶面b122 接触。接着,优选地,所述b甲空腔组件b220上的所述b气孔b221接通压缩气体,把置于其上的所述模板011上的所述模板定位孔012内的键盘硅胶粒021吹起,使所述键盘硅胶粒021端面与所述b翻转平板涂胶面b122更可靠地接触,延时后,所述b气孔b221关闭断开压缩气体。
[0131]
接着,所述b甲空腔组件b220上的所述b气孔b221切换接通真空,把所述模板011上的所述模板定位孔012内的所述键盘硅胶粒021吸住。
[0132]
接着,所述b模板升降气缸b236驱动所述b模板机构b200及置放于其上的所述模板011下降,使所述模板011上的所述模板定位孔012内的键盘硅胶粒021与所述b翻转平板涂胶面b122分离,这样所述键盘硅胶粒021端面就粘上了胶水(相当于印上胶水);然后,所述b气孔b221关闭断开真空。当所述模板011下降到尽头时,把所述模板011及摆放于其上的已经粘了胶水的键盘硅胶粒021移送到下工序。
[0133]
接着,把另外的摆放有键盘硅胶粒021的模板011移送到所述b甲空腔组件b220上面。
[0134]
再接着,所述b翻转电机b132驱动所述b翻转涂胶机构b100翻转180度,使所述b翻转平板涂胶面b122朝上。接着,所述左右b侧翼气缸b922驱动所述左右b侧翼平板b911靠近所述b翻转平板b121。
[0135]
接着,所述左b刮刀升降气缸b315驱动所述左b刮刀架b316上升使所述左b刮刀b317离开所述右 b侧翼平板b911;同时,所述右b刮刀升降气缸b315驱动所述右b刮刀架b316下降使所述右b刮刀b317 靠近所述右b侧翼平板b911。
[0136]
接着,所述b刮胶气缸b325驱动所述b刮胶机构b310向左移动、刮胶,使所述b翻转平板涂胶面 b122上留有一薄层胶水。接着,重复以上动作,循环工作。
[0137]
应该说明:所述b翻转平板b121可以是一个也可以是对称二个,因此相应地,所述b翻转平板涂胶面b122可以是一个也可以是二个,动作原理都跟以上相同。
[0138]
应该说明,以上实施例二的结构,如果把所述b翻转涂胶机构b100与所述b模板机构b200的相互位置变换,即把所述b模板机构b200翻转180度、并设置于所述b翻转涂胶机构b100的上面,属于等同替换,属于本实用新型专利的保护范围。
[0139]
应该说明,以上实施例二的结构,如果把所述b刮胶机构b310改为丝印机构或其它可以在所述b翻转平板涂胶面b122上涂上一薄层胶水的机构,都属于等同替换,属于本实用新型专利的保护范围。
[0140]
实施例三:如图36到图45,涂胶机构采用c摆转涂胶机构c100的本实用新型的键盘硅胶粒端面印胶机,包括c机架c1,所述c机架c1上设置有c摆转涂胶机构c100、c匀胶机构c2、c模板机构c200,优选地所述c匀胶机构c2采用c刮胶机构c310。
[0141]
所述c摆转涂胶机构c100包括c涂胶件c3、c摆臂c133、c摆转轴承座单元c123、c摆
转转轴c124、 c摆转驱动单元c131、c5固定板c134,所述c涂胶件c3为c摆转平板c121,所述c摆转平板c121的外表面为c摆转平板涂胶面c122,优选地所述c摆转驱动单元c131采用c摆转电机c132。
[0142]
所述c摆转电机c132的机体与所述c5固定板c134固定连接,所述c摆转电机c132的转轴通过减速机构与所述c摆转转轴c124连接(或者不要减速机也可以)。所述c5固定板c134与所述c机架c1固定连接。
[0143]
所述c摆转转轴c124与所述c摆转轴承座单元c123转动连接,所述c摆转轴承座单元c123的体部与所述c5固定板c134固定连接,所述c摆转转轴c124与所述c摆臂c133固定连接,所述c摆臂c133 上固定有c摆转平板c121。所述c摆转电机c132驱动所述c摆臂c133及固定于其上的所述c摆转平板 c121在0度与180度之间摆动:图36、图38、图39、图42显示的c摆臂c133及固定于其上的c摆转平板c121在0度位置,而图37、图40、图41、图43显示c摆臂c133及固定于其上的c摆转平板c121在 180度位置。
[0144]
在所述c摆臂c133及固定于其上的c摆转平板c121在0度位置的状态下,于所述c摆转平板c121 的二侧分别设置有c侧翼机构c900,所述c侧翼机构c900包括c机翼平板、c侧翼滑块c912、c侧翼导轨c913、c侧翼导轨固定件c914、c侧翼连接件c915、c侧翼驱动单元c921,优选地所述c侧翼驱动单元c921采用c侧翼气缸c922;所述c侧翼平板c911与所述c侧翼滑块c912固定连接,所述c侧翼导轨 c913与所述c侧翼滑块c912滑动连接,所述c侧翼导轨c913固定在所述c侧翼导轨固定件c914上,所述c侧翼导轨固定件c914与所述c侧翼连接件c915固定连接,所述c侧翼连接件c915固定在所述c机架c1上;所述c侧翼气缸c922的缸体与所述c侧翼连接件c915固定连接,所述c侧翼气缸c922的活塞轴与所述c侧翼平板c911固定连接。所述c侧翼气缸c922驱动所述c侧翼平板c911贴近或离开所述c 摆转平板c121。
[0145]
如图36、图42、图43,优选地所述c匀胶机构c2采用c刮胶机构c310。所述c刮胶机构c310包括 c刮刀架c316,所述c刮刀架c316上设置有c刮刀c317。所述c刮胶机构c310还包括c4固定件c311、c刮刀升降滑块c312、c刮刀升降导轨c313、c刮刀升降驱动单元c314;优选地,所述c刮刀升降驱动单元c314采用c刮刀升降气缸c315。所述c刮刀升降滑块c312固定在所述c4固定件c311上,所述c 刮刀升降导轨c313与所述c刮刀升降滑块c312滑动连接,所述c刮刀升降导轨c313与所述c刮刀架c316 固定连接,所述c刮刀升降气缸c315的缸体与所述c4固定件c311固定连接,所述c刮刀升降气缸c315 的活塞轴与所述c刮刀架c316固定连接;所述c刮刀升降气缸c315驱动所述c刮刀架c316下降或上升,使所述c刮刀c317靠近或离开所述c摆臂c133在0度位置时c摆转平板涂胶面c122。所述c刮胶机构 c310设置有左右二组。
[0146]
所述c刮胶机构c310还连接有c移动机构c320,所述c移动机构c320包括c刮胶滑块c323、c刮胶导轨c322、c刮胶驱动单元c324、c3固定件c321、c6固定件c326;优选地,所述c刮胶驱动单元c324 采用c刮胶气缸c325。所述c刮胶滑块c323固定在所述c刮胶机构c310上的所述c4固定件c311上,所述c刮胶滑块c323与所述c刮胶导轨c322滑动连接,所述c刮胶导轨c322固定在所述c6固定件c326 上,所述c6固定件c326与所述c机架c1固定连接。所述c刮胶气缸c325的缸体与所述c3固定件c321 固定连接,所述c刮胶气缸c325的活塞轴与所述c刮胶机构c310上的所述c4固定件c311固定连接。所述c刮胶气缸c325驱动所述c刮胶机构c310向左或向右移动(按图36、图42的视角)。
[0147]
如图38、图39、图44、图45,所述c模板机构c200包括c甲空腔组件c220,所述c甲空
腔组件c220 上开设有c气孔c221;所述c模板机构c200连接有c模板升降组件c230,所述c模板升降组件c230包括c1固定件c231、c2固定件c234、c模板升降滑块c232、c模板升降导轨c233、c模板升降驱动单元 c235,优选地所述c模板升降驱动单元c235采用c模板升降气缸c236。所述c模板升降滑块c232与所述c1固定件c231固定连接,所述c模板升降导轨c233与所述c甲空腔组件c220固定连接,所述c模板升降滑块c232与所述c模板升降导轨c233滑动连接。所述c模板升降气缸c236的缸体固定在所述c 甲空腔组件c220上,所述c模板升降气缸c236的活塞轴固定在所述c2固定件c234上。所述c模板机构 c200还包括模板011,所述模板011上开设有模板定位孔012,所述模板011上的模板定位孔012摆满键盘硅胶粒021,所述模板011放置在所述c甲空腔组件c220上。所述c模板升降气缸c236驱动所述c甲空腔组件c220及置于其上的所述模板011上升或下降。
[0148]
工作过程及工作原理如下:
[0149]
首先所述c刮胶气缸c325驱动所述c刮胶机构c310到达最左位置(或者先到达最右位置,原理相同),处于左c侧翼机构c900的上方;然后所述c摆动电机构驱动所述c摆臂c133及其上的所述c摆转平板 c121停在0度位置。接着左右c侧翼气缸c922分别驱动左右c侧翼平板c911靠近所述c摆转平板c121,并且保证所述c侧翼平板c911的上表面与所述c摆转平板c121上的所述c摆转平板涂胶面c122处于同一水平平面。接着,调整二组所述c刮胶机构c310,使所述c刮刀架c316下降到最下面时,所述c刮刀 c317与所述c摆转平板涂胶面c122之间有合适的间隙。
[0150]
接着,所述左c刮刀升降气缸c315驱动左c刮刀架c316下降使左c刮刀c317靠近左c侧翼平板c911,同时右c刮刀升降气缸c315驱动右c刮刀架c316上升使右c刮刀c317离开左c侧翼平板c911。然后,在所述左c侧翼平板c911上,位于所述左c刮刀c317与右c刮刀c317之间,放上胶水。
[0151]
然后,所述c刮胶气缸c325驱动所述c刮胶机构c310向右移动、经过所述c摆转平板涂胶面c122、到达右c侧翼平板c911的上面,以上过程中由于所述左c刮刀c317与所述c摆转平板涂胶面c122之间有少量的间隙,因此就会在所述c摆转平板涂胶面c122上留有一薄层胶水,而多余的胶水则被左c刮刀 c317带到右c侧翼平板c911。
[0152]
接着,左右c侧翼气缸c922分别驱动左右c侧翼平板c911与所述c摆转平板c121分离。
[0153]
接着,所述c摆转电机c132驱动所述c摆臂c133及固定于其上的所述c摆转平板c121从0度摆转到180度的位置,使所述c摆转平板涂胶面c122朝下,此时,所述c摆转平板涂胶面c122与所述c模板机构c200上的所述模板011上的所述模板定位孔012内的键盘硅胶粒021相对。
[0154]
接着,所述c模板升降气缸c236驱动所述c模板机构c200及置放于其上的所述模板011上升,当上升到尽头时,所述模板011的所述模板定位孔012内的键盘硅胶粒021的端面与所述c摆转平板涂胶面c122 接触。接着,优选地,所述c甲空腔组件c220上的所述c气孔c221接通压缩气体,把置于其上的所述模板011上的所述模板定位孔012内的键盘硅胶粒021吹起,使所述键盘硅胶粒021端面与所述c摆转平板涂胶面c122更可靠地接触,延时后,所述c气孔c221关闭断开压缩气体。
[0155]
接着,所述c甲空腔组件c220上的所述c气孔c221切换接通真空,把所述模板011上
的所述模板定位孔012内的所述键盘硅胶粒021吸住。
[0156]
接着,所述c模板升降气缸c236驱动所述c模板机构c200及置放于其上的所述模板011下降,使所述模板011上的所述模板定位孔012内的键盘硅胶粒021与所述c摆转平板涂胶面c122分离,这样所述键盘硅胶粒021端面就粘上了胶水(相当于印上了胶水);然后,所述c气孔c221关闭断开真空。当所述模板011下降到尽头时,把所述模板011及摆放于其上的已经粘了胶水的键盘硅胶粒021移送到下工序。
[0157]
接着,把另外的摆放有键盘硅胶粒021的模板011移送到所述c甲空腔组件c220上面。
[0158]
再接着,所述c摆转电机c132驱动所述c摆臂c133及固定于其上的所述c摆转平板c121从180度位置摆转到0度位置,使所述c摆转平板涂胶面c122朝上。接着,所述左右c侧翼气缸c922驱动所述左右c侧翼平板c911靠近所述c摆转平板c121。
[0159]
接着,所述左c刮刀升降气缸c315驱动所述左c刮刀架c316上升使所述左c刮刀c317离开所述右 c侧翼平板c911;同时,右c刮刀升降气缸c315驱动所述右c刮刀架c316下降使所述右c刮刀c317靠近所述右c侧翼平板c911。
[0160]
接着,所述c刮胶气缸c325驱动所述c刮胶机构c310向左移动、刮胶,使所述c摆转平板涂胶面 c122上留有一薄层胶水。接着,重复以上动作,循环工作。
[0161]
应该说明,以上实施例三的结构,如果把所述c摆转涂胶机构c100与所述c模板机构c200的相互位置变换,即把所述c模板机构c200翻转180度、并设置于所述c摆转涂胶机构c100的上面,属于等同替换,属于本实用新型专利的保护范围。
[0162]
应该说明,以上实施例三的结构,如果把所述c刮胶机构c310改为丝印机构或其它可以在所述c摆转平板涂胶面c122上涂上一薄层胶水的机构,都属于等同替换,属于本实用新型专利的保护范围。
[0163]
实施例四:如图46到图59,涂胶机构采用d圆筒涂胶机构d100的本实用新型的键盘硅胶粒端面印胶机,包括d机架d1,所述d机架d1上设置有d圆筒涂胶机构d100、d模板机构d200,优选地所述d机架 d1上还设置有d匀胶机构d2,优选地所述d匀胶机构d2采用d刮胶机构d310。
[0164]
所述d圆筒涂胶机构d100包括d涂胶件d3、d圆筒轴承座单元d123、d圆筒轴d124、d圆筒d125、d 圆筒驱动单元d131、d6固定件d134、d7固定件d135、d胶水容器d136,所述d涂胶件d3为d平板d121,所述d平板d121的下表面为d平板涂胶面d122。优选地所述d圆筒驱动单元d131采用d圆筒电机d132;优选地,还包括有d齿轮d133。
[0165]
所述d圆筒d125与所述d圆筒轴d124固定连接,所述d圆筒轴d124与所述d圆筒轴承座单元d123 转动连接,所述d圆筒轴d124与所述d圆筒电机d132的转轴固定连接,所述d圆筒电机d132的机体与所述d6固定件d134固定连接,所述d6固定件d134与所述d7固定件d135固定连接,所述d圆筒轴承座单元d123与所述d7固定件d135固定连接。优选地,所述圆筒可以不止一个圆筒,也可以是二个圆筒或三个圆筒或多个圆筒,所述二个或三个或多个圆筒都通过各自的所述d圆筒轴d124与所述d圆筒轴承座单元d123转动连接,并且通过所述d齿轮d133联接实现联动。所述d圆筒电机d132驱动所述d圆筒d125 转动。在所述d圆筒d125的最上面还设置有d平板d121,所述d平板d121的下表面与最上面一个d圆筒 d125的圆周面靠近,只有少量间隙或无间隙。
[0166]
在所述d圆筒d125下面还设置有d胶水容器d136,所述d胶水容器d136放胶水。当所述d圆筒电机 d132驱动所述d圆筒d125转动时,所述d圆筒d125把所述d胶水容器d136内的胶水粘上并带到所述d 平板d121的下表面,所述d平板d121的下表面就是d平板涂胶面d122。
[0167]
所述d圆筒涂胶机构d100还连接有d移动机构d320,所述d移动机构d320包括d移动导轨d322、d 移动滑块d323、d3固定件d321、d移动驱动单元d324,优选地所述d移动驱动单元d324采用d移动气缸 d325。
[0168]
所述d平板d121与所述d移动滑块d323固定连接,所述d移动滑块d323与所述d移动导轨d322滑动连接,所述d移动导轨d322与所述d3固定件d321固定连接,所述d移动气缸d325的缸体与所述d3 固定件d321固定连接,所述d移动气缸d325的活塞轴与所述d平板d121固定连接。所述d移动气缸d325 驱动所述d平板d121移动。
[0169]
如图47、图49,所述d移动气缸d325的活塞轴伸出、驱动所述d平板d121到最左的位置,称为第一位置;如图46、图48,所述d移动气缸d325的活塞轴缩回、驱动所述d平板d121到最右的位置,称为第二位置。
[0170]
在所述d平板d121的第二位置、所述d平板d121的下面,设置有d模板机构d200。
[0171]
如图58、图59,所述d模板机构d200包括d甲空腔组件d220,所述d甲空腔组件d220上开设有d 气孔d221;所述d模板机构d200连接有d模板升降组件d230,所述d模板升降组件d230包括d1固定件 d231、d2固定件d234、d模板升降滑块d232、d模板升降导轨d233、d模板升降驱动单元d235,优选地所述d模板升降驱动单元d235采用d模板升降气缸d236。所述d模板升降滑块d232与所述d1固定件d231 固定连接,所述d模板升降滑块d232与所述d模板升降导轨d233滑动连接,所述d模板升降导轨d233 与所述d甲空腔组件d220固定连接。所述d模板升降气缸d236的缸体与所述d甲空腔组件d220固定连接,所述d模板升降气缸d236的活塞轴与所述d2固定件d234固定连接。所述d模板机构d200上放置有模板011,所述模板011上开设有模板定位孔012,所述模板定位孔012摆满键盘硅胶粒021。所述d模板升降气缸d236驱动所述d甲空腔组件d220及置于其上的所述模板011上升或下降。
[0172]
优选地,如图47、图50、图51、图52、图53、图54、图55,所述d圆筒涂胶机构d100的一侧还设置有d匀胶机构d2,优选地所述d匀胶机构d2采用d刮胶机构d310,所述d刮胶机构d310包括d4固定件d311、d5固定件d312、d刮刀升降滑块d313、d刮刀升降导轨d314、d刮刀升降驱动单元d315、d刮刀架d317、d刮刀d318,优选地还包括d防漏件d319,优选地所述d刮刀升降驱动单元d315采用d刮刀升降气缸d316。所述d刮刀升降滑块d313与所述d4固定件d311固定连接,所述d刮刀升降滑块d313与所述d刮刀升降导轨d314滑动连接,所述d刮刀升降导轨d314与所述d刮刀架d317固定连接,所述d 刮刀架d317上固定有d刮刀d318,所述d防漏件d319设置在所述d刮刀d318的二端;所述d刮刀升降气缸d316的缸体固定在所述d4固定件d311上,所述d刮刀升降气缸d316的活塞轴与所述d刮刀架d317 固定连接,所述d4固定件d311与所述d5固定件d312固定连接,所述d5固定件d312与所述d机架d1 固定连接。所述d刮刀升降气缸d316驱动所述d刮刀架d317上升或下降。
[0173]
工作过程及工作原理如下:
[0174]
首先,所述d刮刀升降气缸d316驱动所述d刮刀架d317下降,使所述d刮刀架d317上的所述d刮刀d318离开所述d平板涂胶面d122;接着所述d移动气缸d325驱动所述d平板d121
到达所述第一位置;然后所述d刮刀升降气缸d316驱动所述d刮刀架d317上升,使所述d刮刀架d317上的所述d刮刀d318 靠近所述d平板涂胶面d122,使所述d刮刀d318的刀口与所述d平板涂胶面d122之间有少量的间隙。
[0175]
接着所述d圆筒电机d132驱动所述d圆筒d125转动,与此同时,所述d移动气缸d325驱动所述d 平板d121向第二位置移动。上述过程中,转动的d圆筒d125把d胶水容器d136内的胶水带上到所述d 平板涂胶面d122上,使所述d平板涂胶面d122上涂上胶水层。优选地,上述过程中,由于d刮刀d318 的刀口与所述d平板涂胶面d122之间有少量的间隙,因此上述胶水层被刮薄、在所述d平板涂胶面d122 上形成一薄层胶水,而多余的胶水则被所述d刮刀d318阻挡、掉落到所述d胶水容器d136内;而所述d 防漏件d319则防止胶水从所述d刮刀d318的二端漏出。
[0176]
接着,当所述d移动气缸d325驱动所述d平板d121到达所述第二位置时,所述d平板涂胶面d122 上就留有一薄层胶水。
[0177]
接着,所述d模板升降气缸d236驱动所述d模板机构d200及置放于其上的所述模板011上升,当上升到尽头时,所述模板011上的所述模板定位孔012内的键盘硅胶粒021的端面与所述d平板涂胶面d122 接触。接着,优选地,所述d甲空腔组件d220上的所述d气孔d221接通压缩气体,把置于其上的所述模板011上的所述模板定位孔012内的键盘硅胶粒021吹起,使所述键盘硅胶粒021端面与所述d平板涂胶面d122更可靠地接触,延时后,所述d11关闭断开压缩气体。
[0178]
接着,所述d甲空腔组件d220上的所述d气孔d221切换接通真空,把所述模板011上的所述模板定位孔012内的所述键盘硅胶粒021吸住。
[0179]
接着,所述d模板升降气缸d236驱动所述d模板机构d200及置放于其上的所述模板011下降,使所述模板011上的所述模板定位孔012内的键盘硅胶粒021与所述d平板涂胶面d122分离,这样所述键盘硅胶粒021端面就粘上了胶水(相当于印上了胶水);然后,所述d气孔d221关闭断开真空。当所述模板011下降到尽头后,把所述模板011及摆放于其上的已经粘了胶水的键盘硅胶粒021移送到下工序。
[0180]
接着,把另外的摆放有键盘硅胶粒021的模板011移送到所述d甲空腔组件d220上面。
[0181]
接着,所述d刮刀升降气缸d316驱动所述d刮刀架d317下降,使所述d刮刀d318与所述d平板涂胶面d122分离。接着,所述d移动气缸d325驱动所述d平板d121向第一位置移动,同时所述d圆筒电机d132也驱动所述d圆筒d125反向转动。当到达所述第一位置后,所述d刮刀升降气缸d316驱动所述d 刮刀架d317上升,使所述d刮刀d318靠近所述d平板涂胶面d122。接着,重复以上动作,循环工作。
[0182]
应该说明,也可以不采用以上所述的d圆筒电机d132;而是采用齿轮齿条机构或同步轮同步带机构或其它类似机构与所述d移动气缸d325联动,当所述d移动气缸d325驱动所述d平板d121移动时,通过以上机构使所述d圆筒d125也同步转动,以上结构属于等同替换。
[0183]
应该说明,也可以不采用以上所述的d移动气缸d325;而是采用齿轮齿条机构或同步轮同步带机构或其它类似机构与所述d圆筒电机d132联动,当所述d圆筒电机d132驱动所述d圆筒d125转动时,通过以上机构使所述d平板d121也同步移动,以上结构属于等同替换。
[0184]
实施例五:如图60到图63,采用e模板机构e200在上、e平板涂胶机构e100在下的结
构方式的本实用新型的键盘硅胶粒端面印胶机,包括e机架e1,所述e机架e1上设置有e平板涂胶机构e100、e匀胶机构e2、e模板机构e200,所述e模板机构e200在所述e平板涂胶机构e100的上方。所述e匀胶机构e2采用e刮胶机构e310。
[0185]
所述e平板涂胶机构e100包括e涂胶件e3、e平板升降机构e123,所述e平板升降机构e123包括 e1固定板e124、e平板滑块e133、e平板导轨e134、e平板升降驱动单元e131,优选地所述e平板升降驱动单元e131采用e平板升降气缸e132,所述e涂胶件e3为e平板e121,所述e平板e121的上表面为 e平板涂胶面e122。
[0186]
所述e平板升降气缸e132驱动所述e平板e121上升或下降。如图61所示,是所述e平板升降气缸 e132驱动所述e平板e121下降到最下面的位置,称为下位置;如图62所示,是所述e平板升降气缸e132 驱动所述e平板e121上升到最上面的位置,称为上位置。
[0187]
在所述下位置,所述e平板涂胶机构e100的二侧设置有e侧翼机构e900,本实施例所述e侧翼机构 e900与第二种实施方式、第三种实施方式的侧翼机构类似,因此这里不再详细描述。
[0188]
所述e刮胶机构e310的位置见图60、图61、图62所示。所述e刮胶机构e310还连接有e移动机构 e320。当所述e平板升降气缸e132驱动所述e平板e121下降到所述下位置时,所述e移动机构e320驱动所e刮胶机构e310在所述e平板涂胶面e122上面及所述e侧翼机构e900上面移动,在所述e平板涂胶面e122上涂上一薄层胶水。
[0189]
本实施例所述e移动机构e320与第二种实施方式、第三种实施方式的相应机构类似,因此这里不再详细描述。
[0190]
在所述e平板涂胶机构e100的上方,设置有所述e模板机构e200。所述e模板机构e200包括e甲空腔组件e220、e翻转轴承座单元e230、e翻转转轴e231、e翻转连接件e234、e翻转驱动单元e232、e2 固定板e235,所述e甲空腔组件e220上开设有e气孔e221,优选地所述e翻转驱动单元e232采用e翻转电机e233。所述e甲空腔组件e220与所述e翻转连接件e234固定连接,所述e翻转连接件e234与所述e翻转转轴e231固定连接,所述e翻转转轴e231与所述e翻转轴承座单元e230转动连接,所述e翻转轴承座单元e230与所述e2固定板e235固定连接,所述e翻转电机e233连接减速机,所述减速机的机体与所述e2固定板e235固定连接,所述减速机的出力轴与所述e翻转转轴e231固定连接。所述e甲空腔组件e220上设置有模板011,所述模板011上的所述模板定位孔012内摆放有键盘硅胶粒021。
[0191]
如图61,所述e甲空腔组件e220及设置于其上的模板011在上方、所述模板定位孔012内的键盘硅胶粒021端面朝上的位置,称为0度位置;如图62所示,所述e甲空腔组件e220及设置于其上的模板011 在下方、所述模板定位孔012内的键盘硅胶粒021端面朝下的位置,称为180度位置。所述e翻转电机e233 驱动所述e甲空腔组件e220及设置于其上的所述模板011在0度位置与180度位置之间转动。
[0192]
所述e甲空腔组件e220可以设置为一个,也可以对称设置为二个。
[0193]
应该说明,以上所述e翻转电机e233也可以不需要连接减速机,而是e翻转电机e233的机体与所述 e2固定板e235固定连接,所述e翻转电机e233的转轴与所述e翻转转轴e231固定连接。或者,也可以使用气缸加齿轮齿条机构或气缸加同步带同步轮机构或其它机构代替以上所述e翻转电机e233。
[0194]
工作过程及工作原理如下:
[0195]
首先所述e平板升降气缸e132驱动所述e平板e121下降到所述下位置,然后所述e翻转电机e233 驱动所述e甲空腔组件e220翻到0度位置。接着在所述e甲空腔组件e220上放上已经摆满键盘硅胶粒021 的模板011并固定好;同时,所述e移动机构e320驱动所述e刮胶机构e310在所述e平板涂胶面e122 上涂上一薄层胶水。
[0196]
接着,所述e甲空腔组件e220上的所述e气孔e221接上真空,把所述模板011及其上的键盘硅胶粒 021吸住;接着所述e翻转电机e233驱动所述e甲空腔组件e220及设置于其上的模板011从0度位置翻转到180度位置,此时所述模板011上的所述模板定位孔012内的键盘硅胶粒021的端面朝下,与所述e 平板涂胶面e122相对。
[0197]
接着,所述e升降气缸驱动所述e平板e121上升,当上升到达所述上位置时,所述e平板涂胶面e122 与所述模板011上的所述模板定位孔012内的键盘硅胶粒021的端面接触。接着,优选地,所述e甲空腔组件e220上的所述e气孔e221切断真空,再接上压缩气体,所述压缩气体把所述模板011上的所述模板定位孔012内的键盘硅胶粒021吹向所述e平板涂胶面e122,使所述键盘硅胶粒021端面与所述e平板涂胶面e122更可靠地接触;延时后,所述e气孔e221切断压缩气体,再次接通真空,把所述键盘硅胶粒021 吸住在所述模板定位孔012内。
[0198]
接着,所述e升降气缸驱动所述e平板e121下降,使所述e平板涂胶面e122与所述模板011上的所述模板定位孔012内的键盘硅胶粒021分离,这样所述键盘硅胶粒021端面就粘上了胶水(相当于印上了胶水)。
[0199]
当所述e升降气缸驱动所述e平板e121下降到达所述下位置时,接着所述e翻转电机e233驱动所述 e甲空腔组件e220及置于其上的模板011从180位置翻转到0度位置;接着,所述e气孔e221切断真空。接着,把所述模板011及摆放于其上的已经粘了胶水的键盘硅胶粒021移送到下工序。
[0200]
接着,把另外的摆放有键盘硅胶粒021的模板011移送到所述e甲空腔组件e220上面。接着,重复以上动作,循环工作。
[0201]
应该说明,以上各实施例中的各翻转机构或各摆动机构或各升降机构或各移动机构也可以使用机械手代替,效果相同,属于等同变换。
[0202]
应该说明,以上所述键盘硅胶粒端面印胶机也可以与摆硅胶粒机结合使用,所述模板011上的所述模板定位孔012内的键盘硅胶粒021由所述摆硅胶粒机自动摆放,这也属于本实用新型的保护范围。
[0203]
以上所述,仅是本实用新型较佳实施例而已,并非对本实用新型作任何形式上的限制,虽然本实用新型以较佳实施例公开如上,然而并非用以限定本实用新型,任何熟悉本专业的技术人员,在不脱离本实用新型技术方案范围内,对以上实施例所作的任何修改、等同变化与修饰,均属于本实用新型技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1