一种涂胶机的制作方法
1.本实用新型涉及涂胶技术领域,尤其涉及一种涂胶机。
背景技术:
2.点胶机又称涂胶机、滴胶机、打胶机、灌胶机等,专门对流体进行控制。并将流体点滴、涂覆于产品表面或产品内部的自动化机器,可实现三维、四维路径点胶,精确定位,精准控胶,不拉丝,不漏胶,不滴胶。点胶机主要用于产品工艺中的胶水、油漆以及其他液体精确点、注、涂、点滴到每个产品精确位置,可以用来实现打点、画线、圆型或弧型,许多零部件的组装需要通过点胶机点胶实现固定,常规点胶方法主要采用人工点胶和点胶机点胶,人工点胶效率较低,现有的点胶机在对手机点胶时只能在固定位置点胶,且只能对同一种型号的手机进行点胶,当需要对手机上的不同位置点胶时,难以调整不同手机型号涂胶位置。
技术实现要素:
3.有鉴于此,提供一种自动涂胶定位准确,涂胶效率高的一种涂胶机。
4.1一种涂胶机,其包括点胶平台、点胶夹具、移动机构、点胶机构和控制器,所述点胶平台包括到平台主体和导轨,所述导轨设于平台主体表面,所述点胶夹具包括夹具平台、电磁推进杆和夹块,所述电磁推进杆和夹块固定连接,所述电磁推进杆和夹块均设于夹具平台表面,所述移动机构包括悬臂、横向轨道、横向槽和移动架,所述悬臂与平台主体固定连接,所述横向轨道设于横向槽内部,移动架与横向轨道活动连接,所述点胶机构包括点胶柱和点胶针头,点胶柱与移动架固定连接,所述控制器安装于平台主体侧面。
5.进一步地,所述导轨共有两根,每跟导轨分别固定于平台主体表面。
6.进一步地,所述夹具平台内设有驱动装置,夹具平台可在导轨内移动。
7.进一步地,所述电磁推进杆和夹块共有两组,两根夹块分别对称设置在夹具平台表面,电磁推进杆伸缩长度由控制器控制。
8.进一步地,所述移动架可在移动槽内左右移动,移动架内部有驱动装置,移动架配合轨道滑动。
9.进一步地,所述控制器能控制移动架、夹具平台和点胶柱移动。
10.相对于现有技术,本实用新型的有益效果为,点胶夹具能根据不同手机型号调整装夹位置,通过控制器设置夹具平台、移动架和点胶柱的移动距离参数实现精准涂胶。
附图说明
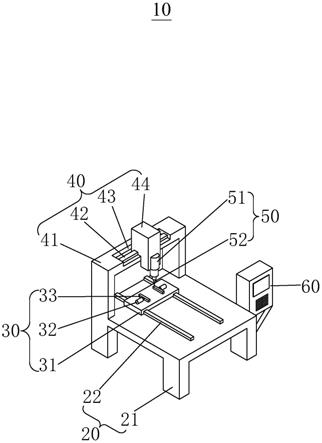
11.图1是本实用新型实施例的涂胶机结构示意图。
具体实施方式
12.以下将结合具体实施例和附图对本实用新型进行详细说明。
13.请参阅图1,示出本实用新型的一种实施例,一种涂胶机10,其包括点胶平台20、点
胶夹具30、移动机构40、点胶机构50和控制器60,所述点胶平台20包括到平台主体21和导轨22,所述导轨22设于平台主体21表面,所述点胶夹具30包括夹具平台31、电磁推进杆32和夹块33,所述电磁推进杆32和夹块33固定连接,所述电磁推进杆32和夹块33均设于夹具平台31表面,所述移动机构40包括悬臂41、横向轨道42、横向槽43和移动架44,所述悬臂41与平台主体21固定连接,所述横向导轨42设于横向槽43内部,移动架44与横向轨道42活动连接,所述点胶机构50包括点胶柱51和点胶针头52,点胶柱51与移动架44固定连接,所述控制器60安装于平台主体21侧面。
14.进一步地,作为本实施例的优选,所述导轨22共有两根,每跟导轨22分别固定于平台主体21表面。
15.进一步地,作为本实施例的优选,所述夹具平台31内设有驱动装置(图中未示出),夹具平台31可在导轨22内移动。
16.进一步地,作为本实施例的优选,所述电磁推进杆32和夹块32共有两组,两根夹块33分别对称设置在夹具平台31表面,电磁推进杆32伸缩长度由控制器60控制。
17.进一步地,作为本实施例的优选,所述移动架44可在移动槽43内左右移动,移动架44内部有驱动装置,移动架44配合轨道42滑动。
18.进一步地,作为本实施例的优选,所述控制器60能控制移动架44、夹具平台31和点胶柱51移动。
19.上述涂胶机10的工作原理,将需要涂胶的手机框架放入夹具平台31内,电磁推进杆32推动夹块33将手机框架夹紧,控制器60控制点胶针头对齐手机框架,控制器60根据导入的手机框架数据按既定程序进行涂胶,涂胶停止电磁推进杆32收缩即可取下手机框架。
20.以上所揭露的仅为本实用新型一种较佳实施例而已,当然不能以此来限定本实用新型之权利范围,因此依本实用新型权利要求所作的等同变化,仍属本实用新型所涵盖的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1