一种气动式步进涂胶系统的制作方法
1.本实用新型涉及涂胶系统技术领域,尤其涉及一种气动式步进涂胶系统。
背景技术:
2.在汽车总装领域,尤其是在汽车涂胶工艺中,目前常用的涂胶工艺为6轴机器人涂胶和人工手动涂胶。而6轴机器人涂胶占地面积大,设备投资高,设备维护和操作要求高。人工手动涂胶是人工手持胶枪进行涂胶作业,存在作业劳动强度大,胶条质量难以保证的缺陷。
技术实现要素:
3.本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种气动式步进涂胶系统。
4.为了实现上述目的,本实用新型采用了如下技术方案:
5.一种气动式步进涂胶系统,包括支架,所述支架上安装有板驱动系统、胶枪导向系统、供胶定量系统,所述板驱动系统上安装有步进系统、板定位系统,所述胶枪导向系统上安装有涂胶枪、胶枪驱动系统、胶枪位置检测系统。
6.优选的,所述步进系统包括气缸、第一滑块、导轨锁、连接块,所述气缸的活塞杆连接有连接块,所述连接块上固定有第一滑块和导轨锁。
7.优选的,所述板定位系统包括滑板、板件拨出机构、板件压紧机构、板件吸附机构、板件定位条、板件、接近开关支架、接近开关、阻挡块,所述滑板上安装有板件拨出机构,板件压紧机构、板件吸附机构、板件定位条,所述板件拨出机构用于拨出板件,所述板件压紧机构用于压紧板件,所述板件吸附机构用于吸附板件,所述板件定位条用于板件定位,所述阻挡块和接近开关支架均固定在滑板上,所述接近开关支架上安装有两个接近开关。
8.优选的,所述板驱动系统包括第二滑块、导轨、阻尼器、第一无杆气缸、第一安装架,所述第一安装架上安装有导轨、阻尼器、第一无杆气缸,所述导轨上安装有第二滑块。
9.优选的,所述涂胶枪包括固定块、枪嘴、进胶连接块、气控关断阀,所述固定块上安装有枪嘴、进胶连接块、气控关断阀。
10.优选的,所述胶枪导向系统包括第二安装架、横移板、胶枪升降机构、导向轴、直线导轨、导向轴固定座,所述第二安装架上安装有胶枪升降机构、直线导轨、导向轴固定座,所述直线导轨上安装有横移板,所述导向轴固定座上安装有导向轴。
11.优选的,所述胶枪驱动系统包括第三安装架、第二无杆气缸、无杆气缸连接件,所述第三安装架上安装有第二无杆气缸,所述第二无杆气缸上安装有无杆气缸连接件。
12.优选的,所述胶枪位置检测系统包括第四安装架、第五安装架、感应块、第六安装架、凸轮开关,所述第四安装架上安装有第五安装架,所述第五安装架上安装有感应块,所述第六安装架固定在横移板上,所述第六安装架上安装有凸轮开关。
13.优选的,所述供胶定量系统包括第七安装架和涂胶定量机,所述第七安装架上安
装有涂胶定量机。
14.与现有技术相比,本实用新型的有益效果是:
15.本实用新型可通过plc进行控制,实现了对板件的连续自动化涂胶作业,操作的效率高,非常方便,将步进系统、板定位系统、板驱动系统、涂胶枪、胶枪导向系统、胶枪驱动系统、胶枪位置检测系统、供胶定量系统集成在一起,结构更加精简,占地面积小,设备维护和操作更加便捷。
附图说明
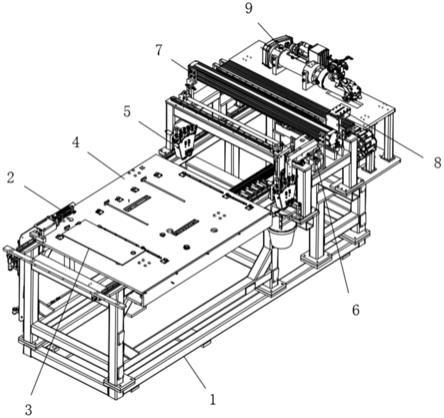
16.图1为本实用新型提出的一种气动式步进涂胶系统的结构示意图;
17.图2为本实用新型提出的一种气动式步进涂胶系统的步进系统的结构示意图;
18.图3为本实用新型提出的一种气动式步进涂胶系统的板定位系统的结构示意图;
19.图4为本实用新型提出的一种气动式步进涂胶系统板驱动系统的结构示意图;
20.图5为本实用新型提出的一种气动式步进涂胶系统的涂胶枪的结构示意图;
21.图6为本实用新型提出的一种气动式步进涂胶系统的胶枪导向系统的结构示意图;
22.图7为本实用新型提出的一种气动式步进涂胶系统的胶枪驱动系统的结构示意图;
23.图8为本实用新型提出的一种气动式步进涂胶系统的胶枪位置检测系统的结构示意图;
24.图9为本实用新型提出的一种气动式步进涂胶系统的供胶定量系统的结构示意图。
25.图中:支架1、步进系统2、气缸21、第一滑块22、导轨锁23、连接块24、板定位系统3、滑板31、板件拨出机构32、板件压紧机构33、板件吸附机构34、板件定位条35、板件36、接近开关支架 37、接近开关38、阻挡块39、板驱动系统4、第二滑块41、导轨42、阻尼器43、第一无杆气缸44、第一安装架45、涂胶枪5、固定块51、枪嘴52、进胶连接块53、气控关断阀54、胶枪导向系统6、第二安装架61、横移板62、胶枪升降机构63、导向轴64、直线导轨65、导向轴固定座66、胶枪驱动系统7、第三安装架71、第二无杆气缸 72、无杆气缸连接件73、胶枪位置检测系统8、第四安装架81、第五安装架82、感应块83、第六安装架84、凸轮开关85、供胶定量系统9、第七安装架91和涂胶定量机92。
具体实施方式
26.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
27.参照图1,一种气动式步进涂胶系统,包括支架1,支架1上安装有板驱动系统4、胶枪导向系统6、供胶定量系统9,板驱动系统4 上安装有步进系统2、板定位系统3,胶枪导向系统6上安装有涂胶枪5、胶枪驱动系统7、胶枪位置检测系统8。
28.作为一种实施方式,参照图2,步进系统2包括气缸21、第一滑块22、导轨锁23、连接块24,气缸21的活塞杆连接有连接块24,连接块24上固定有第一滑块22和导轨锁23上。
29.作为一种实施方式,参照图3,板定位系统3包括滑板31、板件拨出机构32、板件压紧机构33、板件吸附机构34、板件定位条35、板件36、接近开关支架37、接近开关38、阻挡块39,滑板31上安装有板件拨出机构32,板件压紧机构33、板件吸附机构34、板件定位条35,板件拨出机构32用于拨出板件36,板件压紧机构33用于压紧板件36,板件吸附机构34用于吸附板件36,板件定位条35用于板件36定位,阻挡块25和接近开关支架37均固定在滑板31上,接近开关支架37上安装有两个接近开关38。
30.作为一种实施方式,参照图4,板驱动系统4包括第二滑块41、导轨42、阻尼器43、第一无杆气缸44、第一安装架45,第一安装架 45上安装有导轨42、阻尼器43、第一无杆气缸44,导轨42上安装有第二滑块41。
31.作为一种实施方式,参照图5,涂胶枪5包括固定块51、枪嘴 52、进胶连接块53、气控关断阀54,固定块51上安装有枪嘴52、进胶连接块53、气控关断阀54。
32.作为一种实施方式,参照图6,胶枪导向系统6包括第二安装架 61、横移板62、胶枪升降机构63、导向轴64、直线导轨65、导向轴固定座66,第二安装架61上安装有胶枪升降机构63、直线导轨65、导向轴固定座66,直线导轨65上安装有横移板62,导向轴固定座 66上安装有导向轴64。
33.作为一种实施方式,参照图7,胶枪驱动系统7包括第三安装架 71、第二无杆气缸72、无杆气缸连接件73,第三安装架71上安装有第二无杆气缸72,第二无杆气缸72上安装有无杆气缸连接件73。
34.作为一种实施方式,参照图8,胶枪位置检测系统8包括第四安装架81、第五安装架82、感应块83、第六安装架84、凸轮开关85,第四安装架81上安装有第五安装架82,第五安装架82上安装有感应块83,第六安装架84固定在横移板62上,第六安装架84上安装有凸轮开关85。
35.作为一种实施方式,参照图9,供胶定量系统9包括第七安装架 91和涂胶定量机92,第七安装架91上安装有涂胶定量机92。
36.工作原理:本实用新型在使用时,将待涂胶的板件36放置在滑板31上,设备启动后,通过第一无杆气缸44上的电磁阀来驱动第一无杆气缸44,第一无杆气缸44带动板定位系统3沿x轴方向运动直到撞上阻尼器43,阻尼器43迫使板定位系统3停止,代表板定位系统3已经到涂胶起始位置,此时胶枪升降机构63带动涂胶枪5沿z 轴方向运行直到行程结束,涂胶枪5保持在此时的位置,然后第二无杆气缸72带动涂胶枪5在y轴方向运动,凸轮开关85跟随横移板 62在y轴方向运动,第四安装架81、第五安装架82、感应块83固定不动,感应块83接触到凸轮开关85,当凸轮开关85检测到涂胶起始位置(y轴方向)信号时,涂胶枪5通过涂胶定量机92开始涂胶,待第一条胶涂完后,板驱动系统4在x轴方向的阻尼器43的阻挡块下降,导轨锁23夹紧导轨42,气缸21带动滑板31运行,气缸 21行程结束时滑板31停止,同时接近开关38感应到信号,表示滑板31运行至第二条涂胶位置并开始涂胶,第二条涂胶各系统的动作与第一条涂胶系统的动作一样,依次往复,待整个胶条涂布完毕后第二无杆气缸72带动完成涂胶的板件36返回到上料位,板件拨出机构 32驱动拨杆推动板件36,滑出板件36,人工取件装车。
37.本实用新型可通过plc进行控制,实现了对板件36的连续自动化涂胶作业,操作的效率高,非常方便,将步进系统2、板定位系统 3、板驱动系统4、涂胶枪5、胶枪导向系统6、胶
枪驱动系统7、胶枪位置检测系统8、供胶定量系统9集成在一起,结构更加精简,占地面积小,设备维护和操作更加便捷。
38.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1