水舞喷泉机械臂装置的制作方法
1.本发明涉及喷泉水秀表演中的喷泉设备安装技术领域,尤其涉及一种水舞喷泉机械臂装置。
背景技术:
2.大中型机械结构随音乐节奏不断运动,与喷泉设备同时表演可增强水秀效果,使喷泉水型呈现出多维度,全方位视角的震撼效果。然而现有喷泉水秀表演中,机械结构往往仅作为支架用途(专利号cn206973205u),一方面,机械结构仅起到支撑表演设备(led屏幕)作用,其本身并不参与表演,不随音乐运动,视觉效果比较呆板,灵动性不强;另一方面,机械机构上并未安装喷头等相关喷泉设备,与主体喷泉水秀无互动,效果不佳。
技术实现要素:
3.本发明的目的是提供一种水舞喷泉机械臂装置,以实现水舞喷泉机械臂装置及喷泉设备进行多维度,全方位表演效果。
4.为实现上述目的,本发明采取以下技术方案:一种水舞喷泉机械臂装置,其特征在于,它包括一级臂,二级臂,一转盘,所述转盘上端设有第一转动支撑架,所述一级臂底端与所述第一转动支撑架铰接;所述一级臂顶端设有第二转动支撑架,所述二级臂底端与所述第二转动支撑架铰接;还包括第一旋转驱动机构,所述第一旋转驱动机构固定安装在所述转盘上端,所述第一旋转驱动机构输出端转动的连接一级臂,驱动一级臂绕第一转轴旋转;还包括第二旋转驱动机构,所述第二旋转驱动机构固定安装在所述一级臂上,所述第二旋转驱动机构输出端转动的连接二级臂,驱动二级臂绕第二转轴旋转;它还包括第三旋转驱动机构,所述第三旋转驱动机构连接一主动齿轮,主动齿轮与固定连接在所述转盘上的从动齿轮啮合,驱动所述转盘转动;所述第一旋转驱动机构、第二旋转驱动机构、第三旋转驱动机构均通过控制模块由计算机进行控制。
5.所述一级臂底端设置有若干进水口,进水口可与水泵连接。
6.所述一级臂上设置若干供水支管,所述供水支管与第一控制阀连接,所述第一控制阀与喷头连接,所述喷头可以为固定喷头,也可以为数控喷头。
7.所述一级臂上部设有第二控制阀,所述第二控制阀连接第一软管,所述第一软管通过管路连接过水三通第一端口,所述过水三通第二端口连接另一防水减速电机,所述过水三通第三端口连接出水管路,所述出水管路上设置有若干喷头,所述控制阀可以为手动调节阀,也可以电磁阀。
8.所述一级臂上部设有第三控制阀,所述第三控制阀连接第二软管,所述第二软管通过二级臂的供水管路连接一数控喷头,所述控制阀可以为手动调节阀,也可以电磁阀。
9.所述转盘与一空心转轴固定连接,所述空心转轴外侧设一圆环形台阶,所述圆环形台阶端面处安装一推力轴承,所述推力轴承另一端面与一支撑座接触。
10.所述转盘下端外圆周处设置若干辅助支撑轮,保证整体设备运行稳定。
11.所述支撑座和空心转轴之间还设有第一密封装置和第二密封装置,所述第一密封装置位于所述支撑座上部,所述第二密封装置位于所述支撑座下部。
12.所述空心转轴内部下方设置一防水导电环,所述导电环转动端靠近所述转盘,所述导电环静止端与所述支撑架固定连接,以保证机械臂装置运动时,所有控制线缆不会缠绕损坏。
13.所述过水三通第三端口外圆周处设置第一定位传感器,所述第二转动支撑架外侧设置第二定位传感器,所述第一转动支撑架外侧设置第三定位传感器,所述转盘上端中心处设置角度传感器,通过定位传感器及角度传感器可实现对旋转机构的位置及旋转角度进行精准控制。
14.相对于现有技术,本发明所述的水舞喷泉机械臂装置具有以下优势:水舞喷泉机械臂装置通过第一、第二旋转驱动机构实现竖直平面内的转动,通过第三旋转驱动机构实现水平平面360
°
自由旋转,表演时计算机发出指令,通过各控制模块输出信号,配合喷泉音乐及灯光做出各种运动,极大丰富了喷泉表演内容。
15.机械臂装置上安装有数台防水减速电机及喷头,使得装置表演时喷泉喷头亦可以同时舞动,使机械臂表演与主体喷泉相互呼应,增加互动性,同时喷泉表演不仅仅局限于传统的三维表演,真正实现了喷头多角度,多维度表演效果。
16.装置在非表演状态完全处于水中,不影响周围景观,表演时通过第一、第二旋转驱动机构使得机械臂整体升出水面,同时机械臂上各个电机配合音乐做出相应动作舞动,与现有技术相比,机械臂装置不仅仅作为表演载体,而且同样充当演员角色,可与喷头一起舞动,避免造成资源浪费,经济效果更佳。
17.由于各转动部件之间均设有定位传感器,可对各个部件运动相对位置进行精准反馈,可更加高效实现集成化控制,采用电脑预编辑程序进行动作控制,使整个结构及各转动部件定位可靠,动作灵活,提升美感。
附图说明
18.为了更清楚的说明本发明具体实施方式,下面将对具体实施方式描述中所需要使用的附图作为简单的介绍,显而易见地,下面描述中的附图是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动前提下,还可以根据这些附图获得其他的附图。
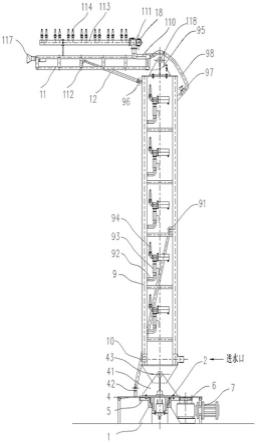
19.图1为本发明侧视图。
20.图2为本发明管路局部图。
21.图3为本发明转轴-支撑座局部图。
22.图4为本发明由水平非表演状态转化为竖直状态示意图。
23.图5为本发明系统图。
24.图6为本发明各部件旋转示意图。
25.图7为本发明采用电机作为驱动机构示意图。
26.图中:1-支撑座,2-空心转轴, 3-推力轴承, 4-转盘, 41-第一转动支撑架,42-一级液压支撑座,43-第一转轴,44-辅助支撑轮,5-从动齿轮,6-主动齿轮,7-第三防水减速电机,8-防水导电环,81-防水导电环转动端,82-防水导电环静止端,9-一级臂,91-第一推力
支撑架,92-供水支管,93-第一控制阀,94-喷头,95-第二转动支撑架,96-二级液压支撑座,97-第二控制阀,98-第一软管,10-一级液压缸,11-二级臂,110-管路,111-过水三通,112-第二推力支撑架,113-出水管路,114-喷头, 115-第三控制阀,116-第二软管,117-数控喷头,118-第二转轴,12-二级液压缸, 13-第一定位传感器,14-第二定位传感器,15-第三定位传感器,16-角度传感器,171-第一密封装置,172-第二密封装置,18-防水减速电机,19-固定支撑架,20-第一防水减速电机,21-第二防水减速电机,22-主动齿轮,23-从动齿轮。
具体实施方式
27.下面结合附图和实施例对本发明进行详细的描述。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明的保护范围。
28.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“连接”应做广义理解,例如可以是固定连接,也可以是可拆卸连接,或一体式连接;可以是机械连接,也可以是电连接;可以是直接连接,也可以通过中间媒介间接相连。对于本领域普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
29.实施例一如图1-2所示,本发明采取以下技术方案,包括:一级臂9,二级臂11,一转盘4,转盘4上端设置第一转动支撑架41,第一转动支撑架41与一级臂9的底端通过第一转轴43铰接;转盘4上端还设有一级液压支撑座42,一级臂9中部设有第一推力支撑架91,一级液压缸10底端与一级液压支撑座42连接,输出端与第一推力支撑架91转动连接,以此驱动一级臂9绕第一转轴43旋转;一级臂9顶部设置第二转动支撑架95,二级臂11底端与第二转动支撑架95通过第二转轴118铰接;一级臂9上部设置二级液压支撑座96,二级臂11中部设置第二推力支撑架112,二级液压缸12底端与二级液压支撑座96铰接,输出端与第二推力支撑架112转动连接,以此驱动二级臂绕第二转轴118旋转;还包括第三防水减速电机7,第三防水减速电机7带动主动齿轮6转动,主动齿轮6与从动齿轮5啮合带动从动齿轮5转动,从动齿轮5与转盘4固定连接,从而带动转盘4旋转。
30.如图3所示,转盘4与一空心转轴2固定连接,空心转轴2外圆周处设一台阶,台阶端面处安装一推力轴承3,推力轴承3另一端面与一支撑座1接触;支撑座1和空心转轴2之间还设有第一密封装置171和第二密封装置172,第一密封装置171位于所述支撑座上部,第二密封装置171位于所述支撑座下部。
31.第一密封装置171、第二密封装置172可以采用静密封以及动密封形式,可有效阻挡水及泥沙等污物进入轴承,延长轴承使用寿命。
32.为了提高机械臂运动时候稳定性,优选的,一级液压缸及二级液压缸数量各为2组,使得机械臂旋转过程中受力更均匀,转动更平稳。
33.为增强机械臂表演效果,在机械臂上设置若干喷头;其中,一级臂9采用整体框架结构,在框架上设置若干供水支管92,供水支管92连接第一控制阀93,第一控制阀93连接喷头94。
34.第一控制阀93可以为手动调节阀,也可以电磁阀;喷头94可以为固定式喷头,也可以为数控喷头。
35.如图1所示,一级臂9上部设有第二控制阀97,第二控制阀97连接第一软管98,第一软管98通过管路110连接过水三通111第一端口,过水三通111第二端口连接防水减速电机18,过水三通111第三端口连接出水管路113,出水管路113上设置有若干喷头114。
36.第二控制阀97可以为手动调节阀,也可以为电磁阀;为了使喷头114喷射出更好效果,优选的,第二控制阀97、第一软管98,过水三通111,出水管路113以及防水减速电机18的数量均为2个。
37.如图2所示,一级臂9上部设有第三控制阀115,第三控制阀115连接第二软管116,第二软管116通过二级臂11的供水管路连接一数控喷头117;第三控制阀115可以为手动调节阀,也可以为电磁阀。
38.一级臂9底端设置有若干进水口,进水口可与水泵连接。
39.如图2及图3所示,过水三通111第三端口外圆周处设置第一定位传感器13,第二转动支撑架95外侧设置第二定位传感器14;如图3所示,第一转动支撑架41外侧固设置第三定位传感器15,转盘4上端中心处设置角度传感器16,通过定位传感器13-15及角度传感器16可实现对旋转机构的位置及旋转角度进行精准控制。
40.如图3所示,空心转轴2内部下方设置一防水导电环8,导电环转动端81靠近转盘4,导电环静止端82与所述支撑架19固定连接,以保证机械臂装置运动时,所有控制线缆不会缠绕损坏。
41.如图3所示,转盘4下端外圆周处设置若干辅助支撑轮44,辅助支撑轮44在支撑架19上滚动,保证整体设备运行稳定。
42.实施例二如图7所示,本发明采取以下技术方案,包括:一级臂9,二级臂11,一转盘4,转盘4上端设置第一转动支撑架41,一级臂9的底端与第一转动支撑架41通过第一转轴43铰接;还包括第一防水电机20,第一防水电机安装在转盘4上,第一防水电机20输出端通过键转动连接第一转轴43,第一转轴43与一级臂9底端固定连接,从而驱动一级臂9绕第一转轴43转动;还包括第二防水电机21,第二防水电机固定在一级臂9上,其输出端通过键连接一主动齿轮22,主动齿轮22通过与从动齿轮23啮合带动从动齿轮23转动,从动齿轮23与第二转轴118通过键连接,从而带动第二转轴118转动,第二转轴118与二级臂11底端固定连接,从而驱动二级臂11绕第二转轴118旋转;它还包括第三防水减速电机7,第三防水减速电机7带动主动齿轮6转动,主动齿轮6与从动齿轮5啮合带动从动齿轮5转动,从动齿轮5与一转盘4固定连接,从而带动转盘4旋转。
43.如图3所示,转盘4与一空心转轴2固定连接,空心转轴2之与一支撑座1之间转动连接,空心转轴2与支撑座1之间设有推力轴承3,推力轴承3位于支撑座1中部,支撑座1和空心转轴2之间还设有第一密封装置171和第二密封装置172,其结构与位置与实施例一相同,在此不再赘述。
44.为增强机械臂表演效果,在机械臂上设置若干管路、阀门及喷头,其具体结构与位置与实施例一相同,在此不再赘述。
45.如图2及图3所示,过水三通111第三端口外圆周处设置第一定位传感器13,第二转动支撑架95外侧设置第二定位传感器14;如图3所示,第一转动支撑架41外侧设置第三定位传感器15,固定支撑座19上端设置角度传感器16,连接方式及位置与实施例一相同,在此不
再赘述。
46.如图3所示,在空心转轴2内部设置一防水导电环8,连接方式及位置与实施例一相同,在此不再赘述。
47.如图4-6所示,本发明工作时,由计算机发出指令,通过控制模块进行信号输出,一级液压缸10及二级液压缸12工作,水舞喷泉机械臂装置整体升出水面并开始表演;第三水下减速电机7工作,通过主动轮6带动齿轮7旋转,进而带动与之连接的转盘4旋转,转盘4带动整个机械臂装置做360度自由转动;根据表演需要,可使防水减速电机18工作,带动出水管113及喷头114转动,同时数控喷头117亦可自由转动,实现各个喷头及机械臂装置共同舞动效果;由于各转动部件之间均设有定位传感器,可对各个部件运动相对位置进行及时反馈,配合音乐喷泉对各部件的运动进行预编辑。
48.非表演状态时,计算机发出指令,机械臂装置旋转到达指定位置,通过二级液压结构下降到水面以下,不遮挡周围景观及游人视线,保证整体景观协调。
49.图6为本发明喷头均采用数控喷头时,各部件旋转示意图,其中w1、w2
…
表示部件旋转方向示意及动作编号,每个部件均可单独运动也可以同时运动,其运动角度、方向及速度均可通过控制系统进行调整变化。
50.上述各实施例仅用于说明本发明,其中各部件的结构、连接方式等都是可以有所变化的,凡是在本发明技术方案的基础上进行的等同变换和改进,均不应排除在本发明的保护范围之外。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1