基于显微成像的对正和热烘一体化的微流控芯片键合设备
1.本发明涉及一种微流控芯片加工仪器,利用显微成像系统实现微流控高精度快速键合,属于微流控芯片加工制造领域。
背景技术:
2.微流控技术是指利用微米级通道操控纳升至皮升体积流体的新兴科学技术,在流体流动、传热、化学反应等方面实现微纳流体的操控,广泛应用于生物检测、化工、医疗、能源等领域,微流控技术因具有生成速率快、反应时间短、混合充分、无交叉污染等特点,被称为“21世纪新兴技术”,近年来国内外微流控技术发展较快,并逐步实现从探索到应用的转变。
3.微流控芯片基本结构由上层开放式微通道芯片和下层平板基底两部分组成,二者通过表面改性工艺进行键合(粘合),完成密闭微通道的封装过程。上层微通道芯片以单晶硅、玻璃和高分子聚合物为主,其中高分子聚合物聚二甲基硅氧烷(pdms)和玻璃等透明材料成为当今微流控芯片制造的主要材料,下层基底以玻璃、压电材料等板材为主。
4.微流控芯片键合过程分为接触面改性、对正键合和热烘强化三步。其中关键环节在于二者的对正键合和热烘强化,对正键合工序指将上层开放式微通道(芯片)与下层平板基板(底)按照设计位置要求精准的键合在一起,键合精度直接决定了微流控芯片成品质量,比如声流控芯片的上层pdms微通道需要与下层压电基底的驻波压力节点线完全对正,才可实现声流控芯片声波与微通道完美耦合,误差精度要求不超过5μm。
5.微流控芯片键合工艺一般包括如下工艺步骤:进行详细阐述:一、接触面改性:接触面改性过程是利用氧等离子等工艺对键合面表层分子化学键进行改性,使其具有亲水特性并与基底实现粘连。由于表面改性只对接触面进行分子量级处理,所以表面处理后粘合特性仅能保持数分钟(60s内完成键合最佳),且只允许一次接触键合,这对下一阶段的对正键合的速度提出了更严格的要求。二、对正键合:对正键合过程是微流控芯片加工过程的关键,对正键合过程指在接触面改性后将上层开放式微通道与下层基底按照设计的位置要求,精准的将二者键合在一起,普通微流控芯片上下层相对位置误差应小于5%,高精度微流控芯片相对位置误差应小于2%,键合精度直接决定微流控芯片的性能。三、热烘强化:热烘强化过程指将对正键合后的芯片放置特定温度环境中烘烤加热,使其分子间化学键连接更加牢固可靠,且热烘阶段需要对芯片施加微弱的均布载荷以提升键合强度。
6.目前现有微流控芯片键合过程多数采用手动键合方式,极少部分采用移动平台键合方式。手动键合方式指操作人员在芯片表面改性后,手动夹取芯片利用目视完成上层微通道与下层基底的对正键合。移动平台键合方式指在目视条件下通过水平移动坐标架实现上层微流控芯片与下层基底之间位置的调整,相对于手动键合移动平台键合精度有所提高。虽然现有手动键合方式和移动平台键合方式具有结构简单,使用成本较低的优势,但其存在以下问题和缺陷:一是键合精度低:手动键合方式和移动平台键合方式依赖于操作人员技术水平,芯片加持不稳定、目视距离误差、键合压力不均匀等操作存在较大人为误差,
很难批量高效高精度的完成芯片键合。二是工序单一无法集成,手动键合方式和移动平台键合方式仅属于对正键合这一过程。对于表面处理、对正键合和热烘强化全过程无法实现一次性加工,增加了工序间的转化过程,操作效率相对较低。操作速度缓慢:由于键合表面处理效能仅能维持数分钟,手动键合方式和移动平台键合方式均为手动操作方式,操作速度较慢,容易错失最佳键合时间。
技术实现要素:
7.本发明的目的是针对现有技术存在的键合精度低、操作效率低、功能单一等不足和缺陷,提供一种基于显微成像的对正和热烘一体化的微流控芯片键合设备,使其不仅具有操作简单可靠,而且可实现微流控芯片的高精度对正键合、热烘强化等功能,进而有效提升微流控芯片键合过程的生产效率。
8.本发明的技术方案如下:
9.一种基于显微成像的对正和热烘一体化的微流控芯片键合设备,其特征在于:所述设备包括:
10.1)显微成像系统:用于在微流控芯片键合过程中实现对上层微通道和下层基底的实时放大显示;
11.2)对正键合系统:该系统包括上层微通道的z方向移动机构、下层基底运动平台和载物台;在载物台上依次设置托架、载玻片和压板;对正键合系统设置在显微成像系统的正下方;
12.3)热烘装置:该装置含有电加热板、隔热垫和温度控制器,所述电加热板安装在下层基底运动平台上;
13.4)机架:该机架由底座和立柱构成;所述显微成像系统和对正键合系统安装在机架上。
14.进一步地,所述显微成像系统包括高分辨率摄像头、长景深显微镜头、镜头倍率调节旋钮、led灯、显示器;led灯安装在长景深显微镜头的底端;长景深显微镜头安装在高分辨率摄像头底端;长景深显微镜头通过数据线与显示器相连。优选地,所述长景深显微镜头的景深至少为10mm,可调倍率为10
‑
100倍。
15.进一步地,所述上层微通道的z方向移动机构包括镜头支撑臂、支撑臂齿轮齿条机构、支撑臂高度调节旋钮和镜架固定块;镜头支撑臂通过支撑臂齿轮齿条机构和镜架固定块与支撑臂高度调节旋钮相连;所示载物台通过载物台齿轮齿条机构和载物台调节旋钮与镜头支撑臂相连。
16.进一步地,所述托架与载物台端部固定连接;压板设置在托架上面,压板通过燕尾槽与载物台组成滑动副,所述载玻片装夹在托架和压板中间。
17.进一步地,所述下层基底运动平台包括x方向运动机构、y方向运动机构、电机控制器和z方向旋转机构;x方向运动机构包括x方向移动台、x方向固定架和x方向步进电机;y方向运动机构包括y方向移动台、y方向固定架和y方向步进电机;电机控制器通过控制线路分别与x方向步进电机和y方向步进电机连接;z方向旋转机构包括旋转法兰和旋转轴,该旋转轴通过轴套安装在底座上;所述的y方向固定架通过螺钉固定连接在旋转法兰的上面,x方向固定架通过螺钉固定连接在y方向移动台的上面。
18.进一步地,x方向运动机构呈90
°
夹角固定连接在y方向运动机构上面;x方向移动台通过丝杠与x方向固定架相连;x方向步进电机通过联轴器与丝杠相连;所述y方向运动机构与x方向运动机构的结构相同。
19.进一步地,所述电加热板通过导线与温度控制器相连;下层基底放置在电加热板上,电加热板通过隔热垫放置在x方向移动平台上。
20.本发明具有以下优点及突出性的技术效果:
①
操控精度高:该发明采用光学显微成像系统实现对微流控芯片的微小结构实时放大显示,提供良好的放大视野;同时显微成像系统较大的景深(>10mm)范围可以保证成像系统可同时观测上层透明微通道与下层基底,提供了高精度视野;利用高精度(移动误差
±
0.005mm)xy移动平台实现基底的精确移动,提升了对正精度。
②
多功能集成:该发明集成了显微成像、对正键合、烘烤强化、自动移动等功能,将微流控芯片键合多个工艺进行集成,简化了操作流程。
③
操控效率高:由于采用电动移动平台和自动烘烤加热系统,将芯片键合过程缩短至60s内,有效保证了表面改性后芯片接触面的键合特性,提升了键合成功率。
附图说明
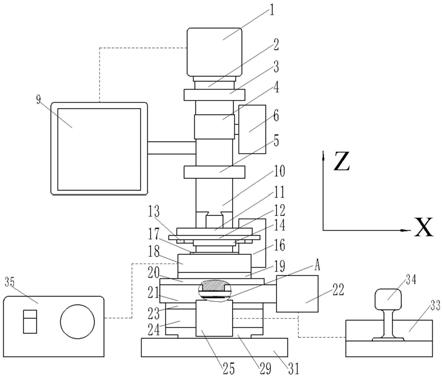
21.图1是本发明所述键合设备的结构原理示意图(主视图)。
22.图2是图1的左视图。
23.图3为图1的俯视图。
24.图4是图1中x方向运动机构的结构示意图(为图1中a局部放大图)。
25.图5是旋转法兰的实施例结构示意图(为图2中b局部放大图)。
26.图中:1
‑
高分辨率摄像头;2
‑
长景深显微镜头;3
‑
镜头支撑臂;4
‑
镜头倍率调节旋钮;5
‑
led灯;6
‑
支撑臂高度调节旋钮;7
‑
支撑臂齿轮齿条机构;8
‑
镜架固定块;9
‑
显示器;10
‑
载物台;11
‑
压板;12
‑
载玻片;13
‑
托架;14
‑
上层微通道;15
‑
载物台齿轮齿条机构;16
‑
载物台调节旋钮;17
‑
下层基底;18
‑
电加热板;19
‑
隔热垫;20
‑
x方向移动台;21
‑
x方向固定架;22
‑
x方向步进电机;23
‑
y方向移动台;24
‑
y方向固定架;25
‑
y方向步进电机;26
‑
电机输出轴;27
‑
联轴器;28
‑
丝杠;29
‑
旋转法兰;30
‑
轴套;31
‑
底座;32
‑
立柱;33
‑
电机控制器;34
‑
电机方向控制手柄;35
‑
温度控制器;36
‑
旋转轴。
具体实施方式
27.下面结合附图对本发明的结构原理、工作过程和具体实施方式做进一步的描述。
28.参见图1、图2和图3,本发明提供的一种基于显微成像的对正和热烘一体化的微流控芯片键合设备,该设备主要由显微成像系统、对正键合系统、热烘装置和机架四部分组成。显微成像系统主要目的是在微流控芯片键合过程中实现对键合对象上层微通道14和下层基底17的实时显示,为键合过程提供放大且清晰的视野。显微成像系统主要由高分辨率摄像头1、长景深显微镜头2、镜头倍率调节旋钮4、led灯5和显示器9等部分组成。高分辨率摄像头1利用数据线与显示器9相连,用于实时显示视野画面;高分辨率摄像头1下端安装有长景深显微镜头2,该长景深显微镜头的景深至少为10mm,可调倍率为10
‑
100倍,可实现不同尺寸视野的放大显示。led灯5端部安装在长景深显微镜头2端部;长景深显微镜头2通过螺栓固定安装在镜头支撑臂3端部的安装孔内。
29.对正键合系统的目的是在显微成像系统的成像基础上,利用移动平台完成上层微通道14与下层基底17之间相对位置的精确调整,并实现二者的精确粘合。对正键合系统包括上层微通道14的z方向移动机构、下层基底运动平台和载物台10;在载物台上依次设置托架13、载玻片12和压板11;对正键合系统设置在显微成像系统的正下方。
30.上层微通道14的z方向移动机构包括镜头支撑臂3、支撑臂齿轮齿条机构7、支撑臂高度调节旋钮6、镜架固定块8、载物台齿轮齿条机构15、载物台调节旋钮16、托架13、载玻片12和上层微通道14;镜头支撑臂3侧面装有支撑臂齿轮齿条机构7;齿轮通过中心轴与支撑臂高度调节旋钮6的中心轴相连,通过旋转支撑臂高度调节旋钮6可实齿轮的转动,并驱动齿条移动,进而带动镜头支撑臂3、载物台10、托架13、上层微通道14等部件的整体z方向的上下移动。载物台10是支撑上层微通道14的支架,载物台10侧面装有载物台齿轮齿条机构15,通过齿轮齿条机构与镜头支撑臂3连接;齿轮通过中心轴与载物台调节旋钮16的中心轴相连相连,通过旋转载物台调节旋钮16可实现长载物台10在z方向高度位置的调节;托架13与载物台10端部固定连接;压板)设置在托架13上面,压板11通过燕尾槽与载物台10组成滑动副,载玻片12装夹在托架13和压板11中间;上层微通道14为键合操作对象,材质为透明的高分子聚合物,依托其自身分子聚合力上层微通道14的上表面与载玻片12自然粘连在一起,粘连上层微通道的载玻片12倒置装夹在托架13与压板1之间。
31.下层基底运动平台包括x方向运动机构、y方向运动机构、z方向旋转机构和电机控制器33组成;x方向运动机构包括x方向移动台20、x方向固定架21、x方向步进电机23;y方向运动机构包括y方向移动台23、y方向固定架24、方向步进电机25;z方向旋转机构包括旋转法兰29、旋转轴36和轴套30;旋转轴36安装在底座31的旋转孔内,底座旋转孔内安装轴套30,轴套30与旋转轴36构成滑动摩擦的旋转副(参见图5);旋转运动根据键合工艺需要手动旋转,进而带动整个运动平台的转动,实现上层微通道14与下层基底17二者之间角度的调节。
32.x方向运动机构和y方向运动机构为相同机构,x方向运动机构呈90
°
夹角固定连接在y方向运动机构上面,x方向移动台20通过丝杠28与x方向固定架21相连;x方向步进电机22通过联轴器27与丝杠28相连,x方向步进电机22通过控制线路与电机控制器34相连(参见图4)。根据键合过程中上层微通道14与下层基底17二者之间距离和角度要求,通过控制电机方向控制手柄34的运动方向控制电机控制器34,电机控制器34根据指令控制x方向步进电机22和y方向步进电机25转动方向与转动圈数,进而带动x方向移动台20和y方向移动台23在水平方向运动,并拖动其上面的下层基底17在水平方向运动,实现上层微通道14与下层基底17二者之间相对距离的调节。
33.热烘机构主要目的是通过高温烘烤增强键合后芯片接触面分子间化学键连接强度,增强键合粘连效果。热烘机构由电加热板18,隔热垫19,温度控制器35等几部分组成。电加热板18为电阻加热铜板,电加热板18通过胶粘连接方式粘接在下方硅酸铝材质的隔热垫19,隔热垫19可有效避免热量传到损坏其它部件,电加热板18通过导线与温度控制器35相连,温度控制器35上设置控温开关和温度调节旋钮等功能,用于调节芯片烘烤的温度参数。
34.机架主要目的是为各零件安装提供支撑,该机架主要由底座29、立柱30等部件组成;所述显微成像系统和对正键合系统整体安装在机架上。
35.加工及安装要求:
①
为保证移动精度,镜头支撑臂3与载物台10上的齿轮齿条部件
采用金属铜加工而成,保证其移动精度误差小于
±
0.01mm。
②
为提升设备强度和降低设备质量,除底座31与立柱32之外其他部件均采用金属铝材加工而成。
③
为提升xy移动平台的旋转精度,z方向转动法兰29与轴套30的采用过度配合安装方式。
36.本发明的工作过程如下:
37.第一步,调节显微成像系统:打开高分辨率摄像头1、led灯5、电机控制器33、温度控制器35部件电源;
38.将表面改性后待键合的上层微通道14放置在载玻片12的中心处(上层微通道14上表面与载玻片12接触),由于上层微通道14材料为高分子聚合物,所以无须粘合剂,上层微通道14就可自然粘连在载玻片12上。将粘接好的载玻片12倒置装夹在载物台的托架13与压板11上。向上旋转支撑臂高度调节旋钮6,使镜头支撑臂3处于较高位置,然后目视显示器9画面中的图像,手动旋转载物台调节旋钮16,直至画面内显示出清晰的上层微通道14图像;将表面改性后的下层基底17放置在电加热板18上表面大致中心位置。
39.第二步,微流控芯片的键合对正:在上一步芯片安装完毕基础上,目视显示器9画面视野,向下旋转支撑臂高度调节旋钮6使托架13上的上层微通道14向下运动,直至显示器9内出现下层基底17的清晰画面,注意,此时上层微通道14与下层基底17之间留有间距,二者未贴紧;根据键合位置要求,手动操控电机方向控制手柄34方向,实现下层基底17在水平方向内快速移动,同时根据角度需求,手动转动旋转法兰29调整下层基底17的角度,根据键合位置要求调整二者之间角度与距离,当二者之间相对位置到达键合要求时,手动向下支撑臂高度调节旋钮6,让其托架13托动上层微通道14向下运动,直至上层微通道14与下层基底17相互接触,完成键合过程。
40.键合完成后继续向下旋转支撑臂高度调节旋钮6使其载物台托架13继续向下移动,此时上层微通道14与下层基底17已经完成接触,压板11的重力不在由托架13支撑,而由键合后的微通道芯片支持,完成对键合后芯片施加固定压力的工艺需求。
41.第三步,微流控芯片的热烘强化
42.打开温度控制器35根据工艺要求设置烘烤时间(范围0
‑
24h)和烘烤温度(30℃
‑
130℃),开始芯片的烘烤过程,烘烤完成后取出键合后芯片,卸下载玻片12,键合过程完成。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1