一种主动式双向微流控结构及其应用方法与流程
1.本发明涉及体外诊断仪器领域,尤其涉及一种主动式双向微流控结构及其应用方法。
背景技术:
2.微流控芯片技术作为一种新型的分析平台,具有微型化、自动化、集成化、便捷和快速等优点,已经在很多领域获得了广泛研究和应用,例如细胞生物学、分析化学、环境监测与保护、司法鉴定、药物合成筛选、材料学和组织工程学等领域。由于它在生物、化学、医学等领域的巨大潜力,已经发展成为一个生物、化学、医学、流体、电子、材料、机械等学科交叉的崭新研究领域。
3.根据操纵液体流动的原理与实现方法不同,微流控又分被动式和主动式两种。其中被动式主要依靠毛细管等方式达到液体单向层析,但因需要控制的液体的物理、化学特性的多样性,导致液体的流速无法统一。主动式微流控则采用气压、静电、压电叠层、电磁、热泡等多种动力方式,则可有效的避免上述问题。
[0004] 如中国专利cn 104148125 a一种微流控芯片上的多态操控装置,包括可调节转动速度的转动平台1、微流控芯片2和至少一条微流管道3,还包括副转轴4和限位结构,微流控芯片2能围绕副转轴4转动,通过转动平台1加速度来调整微流管道3方向与转动平台1径向之间夹角的变化,限位结构可以使微流控芯片2锁定在预设的至少2个不同角度状态。
[0005]
目前,市面上存在的双向微流控结构存在占用空间大、结构复杂、流速较难控制、混匀难度高、清洗不够干净和耗材用量大等问题。
技术实现要素:
[0006]
本发明提出了一种主动式双向微流控结构,解决了传统双向微流控结构存在占用空间大、结构复杂、流速较难控制、混匀难度高、清洗不够干净和耗材用量大问题。
[0007]
为了实现上述目的,本发明采用了如下技术方案:一种主动式双向微流控结构,包括主体框架、动力机构、调整结构和控制机构。
[0008]
所述主体框架包括基板、动力机构定位架和调整结构定位架。
[0009]
所述基板为一“l”形竖板一;基板上设置长方形通孔一。
[0010]
所述动力机构定位架包括竖直隔板、方形固定板一和方形固定板二。
[0011]
所述竖直隔板设置于基板前侧面,竖直隔板位于“l”形竖板一中部,竖直隔板顶端设置一方形固定板一。
[0012]
所述方形固定板一上设置一圆形通孔一,竖直隔板上设置两个方形固定板二。
[0013]
所述方形固定板二均位于方形固定板一的下方,方形固定板二上设置一圆形通孔二,方形固定板二前侧面上设置一圆形通孔三,圆形通孔三另一端位于圆形通孔二的内侧壁上。
[0014]
所述调整结构定位架包括“n”形安装板和定位横板。
[0015]
所述“n”形安装板设置于基板前侧面,“n”形安装板位于竖直隔板的右侧,“n”形安装板上设置四个定位凹槽,定位凹槽底面上设置定位销孔。
[0016]
所述定位横板设置于基板前侧面,定位横板位于“n”形安装板的下方,且定位横板与“n”形安装板构成一“回”字形框,定位横板上底面上设置四个圆形通孔四,四个圆形通孔四呈平行四边形分布,定位横板前侧面和后侧面上均设置两个定位螺孔,定位螺孔一端位于圆形通孔四的内侧壁上。
[0017]
所述动力机构包括动力源和气压调节装置。
[0018]
所述动力源为直线步进电机,直线步进电机安装于方形固定板一上,直线步进电机的活动端通过一连接杆设置于气压调节装置上。
[0019]
所述气压调节装置包括往复式气泵和密封结构一。
[0020]
所述往复式气泵设置于方形固定板二上,往复式气泵受力端穿过上方方形固定板二上圆形通孔二后与连接杆固连;往复式气泵施力端穿过下方方形固定板二上圆形通孔二后与密封结构一固连。
[0021]
所述调整结构包括状态调节装置和密封机构二。
[0022]
所述状态调节装置包括电磁铁一和电磁铁二。
[0023]
所述电磁铁一为一圆柱体一,圆柱体一上底面设置一圆形凹槽一,圆柱体一下底面设置一圆形凹槽二,圆形凹槽一内设置一复位弹簧,复位弹簧的上端设置于“n”形安装板上。
[0024]
所述电磁铁二为一圆形通管一,圆形通管一设置于圆形通孔四上。
[0025]
所述密封机构二包括定位板、长方形竖管密封管和“ㄣ”形密封管。
[0026]
所述定位板设置于长方形通孔一内,定位板上设置四个方形开口通槽。
[0027]
所述长方形竖管密封管和“ㄣ”形密封管下端截面的中心点处于同一直线上。
[0028]
所述密封机构二的上端通过一传动连接杆设置于电磁铁一的圆形凹槽二内,密封机构二的下端均滑动连接于方形开口通槽内。
[0029]
所述控制机构包括控制枢纽和信号输入装置。
[0030]
所述控制枢纽为微处理器,微处理器设置于基板后侧面上。
[0031]
所述信号输入装置包括无线模块和输入终端。
[0032]
所述无线模块分别设置于基板后侧面上和输入终端内。
[0033]
所述输入终端上设置八个触摸传感器模块。
[0034]
相对于现有技术的有益效果:本发明中,通过主体框架、动力机构、调整结构和控制机构的一体化设置,与现有技术有着以下明显不同:1、装置通过气压改变和溶液储存口状态改变,实现对微流控芯片的双向控制。
[0035]
2、步进电机和往复式气泵的组合,实现对微流控芯片内气压的精确控制,最终实现流速的微控。
[0036]
3、利用电磁作用,实现溶液储存口状态的调整,从而实现对流道的选择。
[0037]
4、其结构简单,容易复制,便于量产。同时配合微流控芯片,可取消微流控芯片的单向阀结构,大大降低微流控芯片的结构复杂度。
[0038]
综上所述,本发明相对于传统结构,具有占用空间小、结构精简、流速控制效果好、
液体混匀效果更佳、清洗难度低、污染几率低和耗材用量少等优点。
附图说明
[0039]
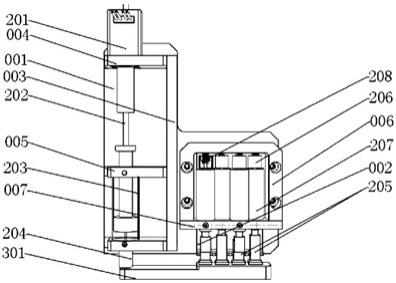
图1为本发明双向控制原理结构示意图;图2为本发明正视局部剖面结构示意图。
[0040]
图中:001.基板、002.长方形通孔一、003.竖直隔板、004.方形固定板一、005.方形固定板二、006.“n”形安装板、007.定位横板、101.气压主动控制设备、102.密封设备、103.流道、201.直线步进电机、202.连接杆、203.往复式气泵、204.密封结构一、205.密封结构二、206.电磁铁一、207.电磁铁二、208.复位弹簧、301.微流控芯片。
具体实施方式
[0041]
以下结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。
[0042]
实施例1,参照附图1
‑
2,一种主动式双向微流控结构,包括主体框架、动力机构、调整结构和控制机构。
[0043]
所述主体框架包括基板001、动力机构定位架和调整结构定位架。
[0044]
所述基板001为一“l”形竖板一;基板001上设置长方形通孔一002。
[0045]
所述动力机构定位架包括竖直隔板003、方形固定板一004和方形固定板二005。
[0046]
所述竖直隔板003设置于基板001前侧面,竖直隔板003位于“l”形竖板一中部,竖直隔板003顶端设置一方形固定板一004。
[0047]
所述方形固定板一004上设置一圆形通孔一,竖直隔板003上设置两个方形固定板二005。
[0048]
所述方形固定板二005均位于方形固定板一004的下方,方形固定板二005上设置一圆形通孔二,方形固定板二005前侧面上设置一圆形通孔三,圆形通孔三另一端位于圆形通孔二的内侧壁上。
[0049]
所述调整结构定位架包括“n”形安装板006和定位横板007。
[0050]
所述“n”形安装板006设置于基板001前侧面,“n”形安装板006位于竖直隔板003的右侧,“n”形安装板006上设置四个定位凹槽,定位凹槽底面上设置定位销孔。
[0051]
所述定位横板007设置于基板001前侧面,定位横板007位于“n”形安装板006的下方,且定位横板007与“n”形安装板006构成一“回”字形框,定位横板007上底面上设置四个圆形通孔四,四个圆形通孔四呈平行四边形分布,定位横板007前侧面和后侧面上均设置两个定位螺孔,定位螺孔一端位于圆形通孔四的内侧壁上。
[0052]
所述动力机构包括动力源和气压调节装置。
[0053]
所述动力源为直线步进电机201,直线步进电机201安装于方形固定板一004上,直线步进电机201的活动端通过一连接杆202设置于气压调节装置上。
[0054]
所述气压调节装置包括往复式气泵203和密封结构一204。
[0055]
所述往复式气泵203设置于方形固定板二005上,往复式气泵203受力端穿过上方方形固定板二005上圆形通孔二后与连接杆202固连;往复式气泵203施力端穿过下方方形固定板二005上圆形通孔二后与密封结构一204固连。
[0056]
所述调整结构包括状态调节装置和密封机构二。
[0057]
所述状态调节装置包括电磁铁一206和电磁铁二207。
[0058]
所述电磁铁一206为一圆柱体一,圆柱体一上底面设置一圆形凹槽一,圆柱体一下底面设置一圆形凹槽二,圆形凹槽一内设置一复位弹簧208,复位弹簧208的上端设置于“n”形安装板006上。
[0059]
所述电磁铁二207为一圆形通管一,圆形通管一设置于圆形通孔四上。
[0060]
所述密封机构二包括定位板、长方形竖管密封管和“ㄣ”形密封管。
[0061]
所述定位板设置于长方形通孔一002内,定位板上设置四个方形开口通槽。
[0062]
所述长方形竖管密封管和“ㄣ”形密封管下端截面的中心点处于同一直线上。
[0063]
所述密封机构二的上端通过一传动连接杆设置于电磁铁一206的圆形凹槽二内,密封机构二的下端均滑动连接于方形开口通槽内。
[0064]
所述控制机构包括控制枢纽和信号输入装置。
[0065]
所述控制枢纽为微处理器,微处理器设置于基板001后侧面上。
[0066]
工作原理及使用方法:参照附图1所示,其双向控制原理为:安装:将微流控芯片301放置到本结构的下方,其中气压主动控制设备101位于调节通孔上,气口102均位于密封机构二下方。
[0067]
工作:当气压主动控制设备101抽气时,本结构同步打开微流控芯片301的气口102处的密封设备,流道103内的液体从右往左流动。
[0068]
当气压主动控制设备101排气时,本结构同步打开微流控芯片301的气口102处的密封设备,流道103内的液体在图示上从左往右流动。
[0069]
当微流控芯片301的气口102处的密封设备闭合后,微流控芯片301的气口102处空气被阻隔。则无论气压主动控制设备101如何动作,对应流道103内的液体不流动。
[0070]
当气压主动控制设备101、微流控芯片301的气口102处的密封设备开启后,流道103内的液体受大气压强相同,流道103内的液体停止流动。
[0071]
本发明是通过一种动力源(如直线步进电机201)、一种气压主动控制设备(如密封结构一204等精密进样器)和一种大气连通控制设备(如密封结构二205)三者结合的方式,可实现对流体的双向控制,且结构简单,容易复制,便于量产。同时配合被控物,可取消被控物的单向阀结构,大大降低被控物的结构复杂度。
[0072]
工作流程:结合图2,简述三种工作流程:左移,右移,双向往复。
[0073]
液体左移:微处理器输出信号给电磁铁一206、电磁铁二207和直线步进电机201,在磁力的排斥作用下密封结构二205上移,下方被控物(微流控芯片301)的气口与大气连通。
[0074]
直线步进电机201延时启动,往复式气泵203的活塞往上移动,抽取空气。
[0075]
液体在往复式气泵203抽取下,由右端往左端移动。
[0076]
其速度可通过直线步进电机201电机进行控制。
[0077]
液体右移:微处理器输出信号给电磁铁一206、电磁铁二207和直线步进电机201,在磁力的排斥作用下密封结构二205上移,下方被控物(微流控芯片301)的气口与大气连通。
[0078]
直线步进电机201延时启动,带动往复式气泵203的活塞往下移动,排出空气。
[0079]
液体在往复式气泵203抽取下,由左端往右端移动。
[0080]
其速度可通过直线步进电机201电机控制。
[0081]
双向往复:为上述运动的结合。
[0082]
所述微处理器的信号输入端可以直接由适配体外诊断设备提供,也可用其他输入装置进行具体双向微流控操作。
[0083]
本结构可直接用于体外诊断设备内或独立用输入装置进行具体双向微流控操作。
[0084]
以上,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
[0085]
本发明未涉及部分均采用现有技术得以实现。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1