一种用于污泥脱水处理系统的布料机构的制作方法
1.本发明涉及污泥脱水处理领域,具体为一种用于污泥脱水处理系统的布料机构。
背景技术:
2.在日常得生产生活中,会产生大量的污水,在污水得处理中又会产生大量污泥,这些污泥如果处理不当,将会造成严重的污染。因此污泥得无害化处理一直是一个重要的问题。压滤式脱水是一种常见的污泥脱水技术,而在污泥进入压滤仓之前首先要将其涂抹在一层滤布上,这个过程往往需要人工来配合设备完成。但是污泥本身具有污染性,会对人体造成伤害,所以能代替人工的自动化设备是非常必要的。
3.在自动化污泥处理设备中,滤布通常会被卷起来存放,所以首先要将滤布卷平整的展开,之后在滤布上分布污泥,并进行后续的压滤工艺。针对以上需求,本发明提供了一种布料机构,能够实现滤布卷的抓取、滤布的吸附与展开,以及污泥的自动分布。
技术实现要素:
4.本发明目的是提供一种用于污泥脱水处理系统的布料机构,该机构能将滤布卷从滤布运输线(2)上夹取至自动滤布卷展开机构(3)上,将滤布卷展开后完成污泥的自动分布。
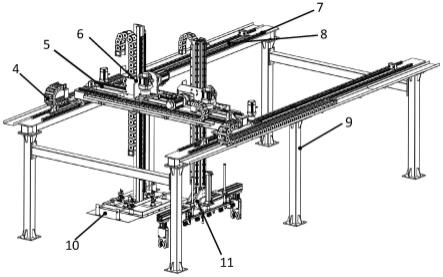
5.本发明包括有:尼龙拖链(4)、滤布抓取机构(11)、出泥机构(10)、 x轴移动机构(5)、y轴移动滑台(6)、齿条(7)、导轨(8)、框架(9);尼龙拖链(4)安装在框架(9)上的线缆槽上,尼龙拖链(4)的一端连接在x轴移动机构(5) 的拖链支架上(41);导轨(8)和齿条(7)由螺栓固定在框架(9)上;x轴移动机构 (5)通过两侧的滑块(35)与框架(9)上的导轨(8)配合,其驱动部件(37)的齿轮轴(67)与框架(9)上的齿条(7)配合;出泥机构(10)与滤布抓取机构(11)也是通过其上面的导轨(8)和齿条(7)与y移动滑台(6)上的滑块(31)和齿轮轴(67)配合;
6.所述的滤布抓取机构(11)由抓取框架(15)、缓冲块(13)、导轨(14)、齿条(12)、布轴抓手(16)、磁性滤布抓手(17)组成;导轨(14)和齿条(12)由螺栓固定在抓取框架(15)上;缓冲块(13)安装在导轨(14)的两端;布轴抓手(16) 通过螺栓连接固定在抓取框架(15)底部;磁性滤布抓手(17)的直线轴承(46)和气缸(44)通过连接板固定在抓取框架(15)上;
7.所述的出泥机构(10)由导杆(18)、泥管接头(19)、z轴移动机构(20)、气动振动器(21)、出泥气缸(22)、调速阀(23)、导杆连接板(24)、活动板(25)、耐磨衬条(26)、泥框本体(27)、气缸固定座(28)、带座直线轴承(29)组成;四个泥管接头(19)由螺钉安装在泥框本体(27)上;导杆(18)与带座直线轴承 (29)配合,导杆(18)一端通过导杆连接板(24)固定在两侧活动板(25)上;调速阀(23)安装在出泥气缸(22)的进气口处;出泥气缸(22)由气缸固定座(28) 固定在泥框本体(27)上,气缸固定座(28)采用螺钉连接;活动板(25)与两侧的耐磨衬条(26)滑动配合;z轴移动机构(20)与泥框本体(27)通过螺栓相连接;
8.所述的y轴移动滑台(6)由驱动部件(30)、滑块(31)、滑台骨架(32)、齿轮间隙调整
版(33)、拖链支架(34)组成;2个驱动部件(30)、6个滑块(31)、 4个齿轮间隙调整版(33)、2个拖链支架(34)都是通过螺栓连接在滑台骨架(32) 上;
9.所述的x轴移动机构(5)由驱动部件(37)、滑块(35)、x轴骨架(42)、滑动板(43)、齿轮间隙调整板(36)、拖链支架(41)、导轨(39)、齿条(40)、缓冲块(38)组成;滑动板(43)固定于x轴骨架(42)两端;滑块(35)通过螺栓固定在滑动板(43)下方;2条导轨(39)、齿条(40)、缓冲块(38)通过螺钉固定在 x轴骨架(42)上;2个驱动部件(37)、8个齿轮间隙调整板(36)、通过螺栓连接在滑动板(43)上,其齿轮轴(67)与x轴骨架(42)上的齿条(40)配合;
10.所述的磁性滤布抓手(17)由气缸(44)、导杆(45)、直线轴承(46)、传感器支架(47)、检测杆支架(54)、红外接近传感器(48)、气缸连接件(49)、导杆连接件(50)、气动手指(51)、弹性检测杆(52)、检测头(53)、磁性吸盘(55)、定位柱(56)、横梁(57)组成;气缸(44)通过气缸连接件(49)安装在横梁(57)上;导杆(45)由导杆连接件(50)固定在横梁(57)上;导杆(45)上装有直线轴承(46),用于与抓取框架(15)相连;检测杆支架(54)、气动手指(51)通过螺栓固定于横梁(57)上,定位柱(56)用于固定它们的水平位置;传感器支架(47)通过螺栓安装在检测杆支架(54)上;红外接近传感器(48)外径有外螺纹,配合螺母装在传感器支架(47)上;弹性检测杆(52)外径套装弹簧,其前端与检测头(53)螺纹配合,其末端用螺母配合弹簧压力将弹性检测杆(52)固定在检测杆支架(54)上;5 个磁性吸盘(55)采用螺栓连接均布于横梁(57)上;
11.所述的布轴抓手(16)由固定板(58)、销轴连接板(59)、销轴(60)、动爪气缸(61)、布轴抓手连接板(62)、动爪软垫(63)、动爪骨架(64)、气缸前端连接件(66)、动爪指端(65)组成;动爪气缸(61)末端固定在布轴抓手连接板 (62)上;2个固定板(58)通过螺钉与固定于气缸前端,气缸前端连接件(66)装在动爪气缸(61)的活塞上;2个固定板(58)之间装有2个动爪骨架(64),2个动爪骨架(64)通过销轴(60)和销轴连接板(59)与气缸前端连接件(66)相配合;动爪指端(65)由螺栓固定在动爪骨架(64)上;动爪软垫(63)通过螺钉安装与动爪指端(65)上;
12.所述的驱动部件(30)(37)由步进电机(70)、减速器(69)、齿轮轴 (67)、减速器安装板(68)组成;步进电机(70)与减速器(69)螺栓连接;减速器 (69)输出轴与齿轮轴(67)通过螺母轴向固定,由平键实现周向固定;减速器安装板(68)通过螺栓安装在减速器(69)上。
13.本发明的工作过程及原理:
14.滤布抓取机构(11)上装有布轴抓手(16),可以将滤布运输线(2)上的滤布卷夹取至自动滤布卷展开机构(3)上。之后磁性滤布抓手(17)向下运动,直至检测头(53)触碰滤布卷,引发弹性检测杆(52)位移,触发红外接近传感器 (48),随后气动手指(51)勾起滤布,使磁性吸盘(55)能够吸附住勾起的滤布,同时配合自动滤布卷展开机构(3)完成滤布的平稳展开。展开后磁性吸盘(55)松开,磁性滤布抓手(17)升起,出泥机构(10)开始工作,由泥管接头(19)进入的污泥随着出泥机构(10)的移动,均匀的涂抹在展开的滤布上。为了保证污泥顺利的流出,在泥框本体(27)上安装了气动振动器(21)。
15.本发明的有益效果:
16.能够自动将滤布卷从滤布运输线(2)运送到工位,可以自动抓取滤布,并且配合自动滤布卷展开机构(3)在工位上展开滤布卷,实现了在滤布上自动分布污泥。整个过程全自动化,避免人工操作,提升了效率,保证了安全。
附图说明
17.图1是本发明实施例所属的整个布料系统的示意图;
18.图2是本发明实施例的总装配轴测图;
19.图3是本发明实施例的滤布抓取机构装配图;
20.图4是本发明实施例的出泥机构装配图;
21.图5是本发明实施例的x轴移动机构的装配图;
22.图6是本发明实施例的y轴移动滑台的装配图;
23.图7是本发明实施例的磁性滤布抓手的装配图;
24.图8是本发明实施例的布轴抓手的装配图;。
25.图9是实施例的驱动部件的装配图;。
26.其中1—本发明;2—滤布运输线;3—自动滤布卷展开机构;4—尼龙拖链;5—x轴移动机构;6—y轴移动滑台;7—齿条;8—从导轨;9—框架; 10—出泥机构;11—滤布抓取机构;12—齿条;13—缓冲块;14—导轨;15—抓取框架;16—布轴抓手;17—磁性滤布抓手;18—导杆;19—泥管接头;20 —z轴移动机构;21—振动器;22—出泥气缸;23—调速阀;24—导杆连接板; 25—活动板;26—耐磨衬条;27—泥框本体;28—气缸固定座;29—带座直线轴承;30—驱动部件;31—滑块;32—滑台骨架;33—齿轮间隙调整版;34—拖链支架;35—滑块;36—齿轮间隙调整板;37—驱动部件;38—缓冲块;39 —同步带轮;40—齿条;41—拖链支架;42—x轴骨架;43—滑动板;44—气缸; 45—导杆;46—直线轴承;47—传感器支架;48—红外接近传感器;49—气缸连接件;50—导杆连接件;51—气动手指;52—弹性检测杆;53—检测头;54 —检测杆支架;55—磁性吸盘;56—定位柱;57—横梁;58—固定板;59—从固定板;60—销轴;61—动爪气缸;62—布轴抓手连接板;63—动爪软垫;64 —动爪骨架;65—动爪指端;66—缸前端连接件;
具体实施方式
27.请参阅图1至图9,为本发明的实施例,本发明包括有:尼龙拖链(4)、滤布抓取机构(11)、出泥机构(10)、x轴移动机构(5)、y轴移动滑台(6)、齿条 (7)、导轨(8)、框架(9);尼龙拖链(4)安装在框架(9)上的线缆槽上,尼龙拖链(4)的一端连接在x轴移动机构(5)的拖链支架上(41);导轨(8)和齿条(7)由螺栓固定在框架(9)上;x轴移动机构(5)通过两侧的滑块(35)与框架(9)上的导轨(8)配合,其驱动部件(37)的齿轮轴(67)与框架(9)上的齿条(7)配合;出泥机构(10)与滤布抓取机构(11)也是通过其上面的导轨(8)和齿条(7)与y移动滑台(6)上的滑块(31)和齿轮轴(67)配合;
28.所述的滤布抓取机构(11)由抓取框架(15)、缓冲块(13)、导轨(14)、齿条(12)、布轴抓手(16)、磁性滤布抓手(17)组成;导轨(14)和齿条(12)由螺栓固定在抓取框架(15)上;缓冲块(13)安装在导轨(14)的两端;布轴抓手(16) 通过螺栓连接固定在抓取框架(15)底部;磁性滤布抓手(17)的直线轴承(46)和气缸(44)通过连接板固定在抓取框架(15)上;
29.所述的出泥机构(10)由导杆(18)、泥管接头(19)、z轴移动机构(20)、气动振动器(21)、出泥气缸(22)、调速阀(23)、导杆连接板(24)、活动板(25)、耐磨衬条(26)、泥框本体(27)、气缸固定座(28)、带座直线轴承(29)组成;四个泥管接头(19)由螺钉安装在泥框本体(27)上;导杆(18)与带座直线轴承 (29)配合,导杆(18)一端通过导杆连接板(24)固定在两
侧活动板(25)上;调速阀(23)安装在出泥气缸(22)的进气口处;出泥气缸(22)由气缸固定座(28) 固定在泥框本体(27)上,气缸固定座(28)采用螺钉连接;活动板(25)与两侧的耐磨衬条(26)滑动配合;z轴移动机构(20)与泥框本体(27)通过螺栓相连接;
30.所述的y轴移动滑台(6)由驱动部件(30)、滑块(31)、滑台骨架(32)、齿轮间隙调整版(33)、拖链支架(34)组成;2个驱动部件(30)、6个滑块(31)、4个齿轮间隙调整版(33)、2个拖链支架(34)都是通过螺栓连接在滑台骨架(32) 上;
31.所述的x轴移动机构(5)由驱动部件(37)、滑块(35)、x轴骨架(42)、滑动板(43)、齿轮间隙调整板(36)、拖链支架(41)、导轨(39)、齿条(40)、缓冲块(38)组成;滑动板(43)固定于x轴骨架(42)两端;滑块(35)通过螺栓固定在滑动板(43)下方;2条导轨(39)、齿条(40)、缓冲块(38)通过螺钉固定在 x轴骨架(42)上;2个驱动部件(37)、8个齿轮间隙调整板(36)、通过螺栓连接在滑动板(43)上,其齿轮轴(67)与x轴骨架(42)上的齿条(40)配合;
32.所述的磁性滤布抓手(17)由气缸(44)、导杆(45)、直线轴承(46)、传感器支架(47)、检测杆支架(54)、红外接近传感器(48)、气缸连接件(49)、导杆连接件(50)、气动手指(51)、弹性检测杆(52)、检测头(53)、磁性吸盘(55)、定位柱(56)、横梁(57)组成;气缸(44)通过气缸连接件(49)安装在横梁(57)上;导杆(45)由导杆连接件(50)固定在横梁(57)上;导杆(45)上装有直线轴承(46),用于与抓取框架(15)相连;检测杆支架(54)、气动手指(51)通过螺栓固定于横梁(57)上,定位柱(56)用于固定它们的水平位置;传感器支架(47)通过螺栓安装在检测杆支架(54)上;红外接近传感器(48)外径有外螺纹,配合螺母装在传感器支架(47)上;弹性检测杆(52)外径套装弹簧,其前端与检测头(53)螺纹配合,其末端用螺母配合弹簧压力将弹性检测杆(52)固定在检测杆支架(54)上;5 个磁性吸盘(55)采用螺栓连接均布于横梁(57)上;
33.所述的布轴抓手(16)由固定板(58)、销轴连接板(59)、销轴(60)、动爪气缸(61)、布轴抓手连接板(62)、动爪软垫(63)、动爪骨架(64)、气缸前端连接件(66)、动爪指端(65)组成;动爪气缸(61)末端固定在布轴抓手连接板 (62)上;2个固定板(58)通过螺钉与固定于气缸前端,气缸前端连接件(66)装在动爪气缸(61)的活塞上;2个固定板(58)之间装有2个动爪骨架(64),2个动爪骨架(64)通过销轴(60)和销轴连接板(59)与气缸前端连接件(66)相配合;动爪指端(65)由螺栓固定在动爪骨架(64)上;动爪软垫(63)通过螺钉安装与动爪指端(65)上;
34.所述的驱动部件(30)(37)由步进电机(70)、减速器(69)、齿轮轴(67)、减速器安装板(68)组成;步进电机(70)与减速器(69)螺栓连接;减速器 (69)输出轴与齿轮轴(67)通过螺母轴向固定,由平键实现周向固定;减速器安装板(68)通过螺栓安装在减速器(69)上。
35.本发明的工作过程及原理:
36.滤布抓取机构(11)上装有布轴抓手(16),可以将滤布运输线(2)上的滤布卷夹取至自动滤布卷展开机构(3)上。之后磁性滤布抓手(17)向下运动,直至检测头(53)触碰滤布卷,引发弹性检测杆(52)位移,触发红外接近传感器 (48),随后气动手指(51)勾起滤布,使磁性吸盘(55)能够吸附住勾起的滤布,同时配合自动滤布卷展开机构(3)完成滤布的平稳展开。展开后磁性吸盘(55)松开,磁性滤布抓手(17)升起,出泥机构(10)开始工作,由泥管接头(19)进入的污泥随着出泥机构(10)的移动,均匀的涂抹在展开的滤布上。为了保证污泥顺利的流出,在泥框本体(27)上安装了气动振动器(21)。
37.本发明的有益效果:
38.能够自动将滤布卷从滤布运输线(2)运送到工位,可以自动抓取滤布,并且配合自动滤布卷展开机构(3)在工位上展开滤布卷,实现了在滤布上自动分布污泥。整个过程全自动化,避免人工操作,提升了效率,保证了安全。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1