一种工业机器人喷涂工作站的制作方法
1.本发明属于机器人自动喷涂领域,特别是涉及一种工业机器人喷涂工作站。
背景技术:
2.喷涂是通过喷枪或碟式雾化器,借助于压力或离心力,分散成均匀而微细的雾滴,施涂于被涂物表面的涂装方法;由于喷涂中会出现高度分散的漆雾以及挥发出来的溶剂不利于人员身体健康,且人工喷涂很难保证图层均匀,所以汽车、陶瓷等行业产品对于图层要求高的都改为工业机器人自动喷涂;但是实际的喷涂作业对环境要求很高,需要百万级的无尘车间,需要喷涂室、供漆室、固化烘干炉、喷涂作业输送设备、消雾及废水废气处理设备等,由于设备体积庞大不利于学校培养能够掌握喷涂工业机器人技术的人才。
技术实现要素:
3.本发明的目的在于提供一种工业机器人喷涂工作站,解决现有技术体积庞大、不利于教学的问题。
4.为解决上述技术问题,本发明是通过以下技术方案实现的:本发明为一种工业机器人喷涂工作站,包括底板,所述底板上表面分别固定安装有喷漆柜、供漆系统、喷涂机器人、机器人控制柜、工作站控制柜和护栏,所述喷漆柜包括柜体、过滤板、阻隔板、水槽和驱动电机,所述柜体前端面分别固定连接有过滤板和若干阻隔板,过滤板采用双层的纸质过滤板,由两层可折合的纸板粘合在一起组成的,并构成了一些v型的过滤室,纸质过滤板可更换黏附涂料,使用寿命长,纸质过滤板内部还设置有纤维质过滤器,使过滤效果达到98%以上,安装拆卸简单,便于用户更换维护,所述柜体下表面固定安装有水槽,所述柜体上表面固定安装有驱动电机,所述柜体内部设置有抽风扇,驱动电机驱动抽风扇抽吸喷涂时的空气,所述水槽上表面固定安装有喷漆台,喷漆台安装在水槽中,所述喷漆台包括动力箱和工件台,所述动力箱上表面传动连接有工件台,所述供漆系统包括涂料桶、隔膜泵和储气罐,所述储气罐上表面固定安装有涂料桶,所述涂料桶和储气罐均与隔膜泵相连通,配合调压系统组合成循环式涂装供漆系统,依靠压缩空气对油漆液体加压,然后将油漆输送至喷涂机器人末端的喷枪,所述喷涂机器人包括安装座、旋转座、俯仰座、转动座、伸缩杆和喷枪,所述底板上表面固定安装有安装座,所述安装座上表面转动连接有旋转座,所述旋转座两相对表面转动连接有俯仰座,所述俯仰座顶端转动连接有转动座,所述转动座顶端固定安装有伸缩杆,所述伸缩杆顶端固定安装有喷枪,使喷涂机器人可以进行拖动示教并编程。
5.优选地,所述机器人控制柜包括安装箱和控制板,所述安装箱前端面固定安装有控制板,所述安装箱内部设置有电源和主板。
6.优选地,所述机器人控制柜通信连接有示教器,所述机器人控制柜与喷涂机器人电性连接,方便控制喷涂机器人。
7.优选地,所述护栏与底板尺寸相适应,所述护栏一表面铰接有出入口,用来划分工作站区域,并可以分批进行培训防止过多人员挤进去操作而产生其他危险。
8.优选地,所述工作站控制柜上表面分别固定安装有触摸屏和操作板,所述工作站控制柜内部设置有plc,方便编程操作其他部件。
9.优选地,所述工作站控制柜分别与喷漆柜、喷漆台、供漆系统电性连接,由冷轧板折弯焊接而成。
10.优选地,所述供漆系统的输出端与喷涂机器人的喷枪相连通,供漆系统输送油漆进行喷涂。
11.本发明具有以下有益效果:
12.本发明在使用时通过设置喷漆柜、喷漆台、供漆系统、喷涂机器人、机器人控制柜和工作站控制柜,使得本装置能够方便的进行喷涂工作,喷涂时产生的气雾等杂质由喷漆柜吸收过滤,方便在平常环境使用,结构简单、体积小、安装运输调试容易、组合及可拓展性强、成本低,简化了实际工业的喷涂作业流程,只保留工业机器人喷涂的环节,方便在学校进行教学,能够直观的给学生展示喷涂流程并方便学生上手使用。
13.当然,实施本发明的任一产品并不一定需要同时达到以上所述的所有优点。
附图说明
14.为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
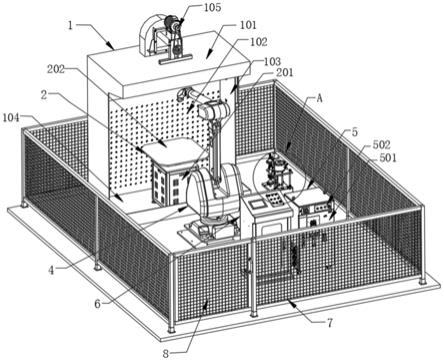
15.图1为本发明的一种工业机器人喷涂工作站的结构示意图;
16.图2为本发明的一种工业机器人喷涂工作站的俯视图;
17.图3为本发明的一种工业机器人喷涂工作站的侧视图;
18.图4为本发明的一种工业机器人喷涂工作站的正视图;
19.图5为本发明的图1的a处放大图。
20.附图中,各标号所代表的部件列表如下:1、喷漆柜;2、喷漆台;3、供漆系统;4、喷涂机器人;5、机器人控制柜;6、工作站控制柜;7、护栏;8、出入口;9、底板;101、柜体;102、过滤板;103、阻隔板;104、水槽;105、驱动电机;201、动力箱;202、工件台;301、涂料桶;302、隔膜泵;303、储气罐;401、安装座;402、旋转座;403、俯仰座;404、转动座;405、伸缩杆;406、喷枪;501、安装箱;502、控制板;601、触摸屏;602、操作板。
具体实施方式
21.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
22.在本发明的描述中,需要理解的是,术语“开孔”、“上”、“下”、“厚度”、“顶”、“中”、“长度”、“内”、“四周”等指示方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的组件或元件必须具有特定的方位,以特定的方位构造和操作,因此不能理解为对本发明的限制。
23.请参阅图1-5所示,本发明为一种工业机器人喷涂工作站,包括底板9,底板9上表面分别固定安装有喷漆柜1、供漆系统3、喷涂机器人4、机器人控制柜5、工作站控制柜6和护栏7,喷漆柜1包括柜体101、过滤板102、阻隔板103、水槽104和驱动电机105,柜体101前端面分别固定连接有过滤板102和若干阻隔板103,过滤板102采用双层的纸质过滤板,由两层可折合的纸板粘合在一起组成的,并构成了一些v型的过滤室,纸质过滤板可更换黏附涂料,使用寿命长,纸质过滤板内部还设置有纤维质过滤器,使过滤效果达到98%以上,安装拆卸简单,便于用户更换维护,柜体101下表面固定安装有水槽104,柜体101上表面固定安装有驱动电机105,柜体101内部设置有抽风扇,驱动电机105驱动抽风扇抽吸喷涂时的空气,水槽104上表面固定安装有喷漆台2,喷漆台2安装在水槽104中,喷漆台2包括动力箱201和工件台202,动力箱201上表面传动连接有工件台202,供漆系统3包括涂料桶301、隔膜泵302和储气罐303,储气罐303上表面固定安装有涂料桶301,涂料桶301和储气罐303均与隔膜泵302相连通,配合调压系统组合成循环式涂装供漆系统3,依靠压缩空气对油漆液体加压,然后将油漆输送至喷涂机器人4末端的喷枪406,喷涂机器人4包括安装座401、旋转座402、俯仰座403、转动座404、伸缩杆405和喷枪406,底板9上表面固定安装有安装座401,安装座401上表面转动连接有旋转座402,旋转座402两相对表面转动连接有俯仰座403,俯仰座403顶端转动连接有转动座404,转动座404顶端固定安装有伸缩杆405,伸缩杆405顶端固定安装有喷枪406,使喷涂机器人4可以进行拖动示教并编程。
24.机器人控制柜5包括安装箱501和控制板502,安装箱501前端面固定安装有控制板502,安装箱501内部设置有电源和主板。
25.机器人控制柜5通信连接有示教器,机器人控制柜5与喷涂机器人4电性连接,方便控制喷涂机器人4。
26.护栏7与底板9尺寸相适应,护栏7一表面铰接有出入口8,用来划分工作站区域,并可以分批进行培训防止过多人员挤进去操作而产生其他危险。
27.工作站控制柜6上表面分别固定安装有触摸屏601和操作板602,工作站控制柜6内部设置有plc,方便编程操作其他部件。
28.工作站控制柜6分别与喷漆柜1、喷漆台2、供漆系统3电性连接,由冷轧板折弯焊接而成。
29.供漆系统3的输出端与喷涂机器人4的喷枪406相连通,供漆系统3输送油漆进行喷涂。
30.本实施例的一个具体应用为:使用时首先检查电路、气路是否正常,并把待喷涂的物品放置于喷漆台2上,接通电源与气源;然后利用拖动示教手柄对喷涂机器人4进行拖动示教,可以通过示教手柄来控制喷漆台2旋转及激活喷枪406,同时可以记录喷涂机器人4的运动并对示教程序段确认或者重新示教,完成示教后可以将示教手柄拆除,然后就可以启动自动喷涂作业,通过调节供漆系统3的压力来调整更好的流量控制和更强的吸料能力,大幅度的提升喷涂品质。
31.在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合
适的方式结合。
32.以上公开的本发明优选实施例只是用于帮助阐述本发明。优选实施例并没有详尽叙述所有的细节,也不限制该发明仅为所述的具体实施方式。显然,根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本发明的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本发明。本发明仅受权利要求书及其全部范围和等效物的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1