一种用于粉料和膏状或浓稠液体状物料混合的捏合机
1.本实用新型涉及捏合机的技术领域,特别涉及一种用于粉料和膏状或浓稠液体状物料混合的捏合机。
背景技术:
2.在科研饲料制作过程中各种原料需要混合均匀,普通混合机只可以混合均匀原料来源是粉料的物料,对于原料既有粉状物料又有膏状或浓稠液体状物料的就无法混合均一,达不到饲料制作要求,需要用手工搓膏状或浓稠液体状物料跟粉状物料混合过筛达到混合均匀的状态。为了提高混合效率,需要具有捏合功能并能把粉状物料和膏状或浓稠液体状物料混合均一的机器。
技术实现要素:
3.本实用新型的目的在于提供一种用于粉料和膏状或浓稠液体状物料混合的捏合机,以解决现有技术无法实现粉状物料和膏状或浓稠液体状物料混合均一的问题。
4.为了解决上述技术问题,本实用新型提供了一种用于粉料和膏状或浓稠液体状物料混合的捏合机,包括基座和捏合斗;所述基座设有驱动机构,所述驱动机构用于驱动所述捏合斗工作;所述捏合斗内设有捏合件,所述捏合件与所述驱动机构连接,所述捏合件用于在所述驱动机构的驱动下自转;所述捏合件设有多个捏合部,多个所述捏合部沿所述捏合件的轴向排列布置,多个所述捏合部在所述捏合件相对的两侧交错排列布置;所述捏合部包括外凸位和内凹位,所述外凸位往所述捏合件的径向外延伸,所述内凹位往所述捏合件的径向内凹陷,所述外凸位和所述内凹位分别布置于所述捏合件相对的两侧。
5.在其中一个实施例中,所述外凸位的外表面设有外斜面,在往远离所述捏合部相邻部位的方向上,所述外斜面与所述捏合件中心轴的间距呈线性递减。
6.在其中一个实施例中,在所述内凹位朝向的方向上,所述内凹位两侧的间距呈线性递增。
7.在其中一个实施例中,所述内凹位的两侧之间设有内斜面,在往远离所述捏合部相邻部位的方向上,所述内斜面与所述捏合件中心轴的间距呈线性递减。
8.在其中一个实施例中,所述驱动机构包括驱动电机、减速箱、传动皮带和传动链条;所述传动皮带的一侧套于所述驱动电机的输出端外,所述传动皮带的另一侧套于所述减速箱的输入端外,所述传动链条的一侧套于所述减速箱的输出端外,所述传动链条的另一侧套于所述捏合件的输入端外,以使所述驱动电机的转动用于驱动所述捏合件自转。
9.在其中一个实施例中,所述基座的底部设有多个防震脚,多个所述防震脚分别设于所述基座底部的边角处。
10.本实用新型的有益效果如下:
11.由于多个所述捏合部在所述捏合件相对的两侧交错排列布置,所述捏合部包括外凸位和内凹位,所述外凸位和所述内凹位分别布置于所述捏合件相对的两侧,所以当捏合
件进行转动时,能够形成向内和向外的挤压力,让粉状和膏状或浓稠液体状物料混合均匀,切实解决了现有技术无法实现粉状物料和膏状或浓稠液体状物料混合均一的问题。
附图说明
12.为了更清楚地说明本实用新型的技术方案,下面将对实施方式中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
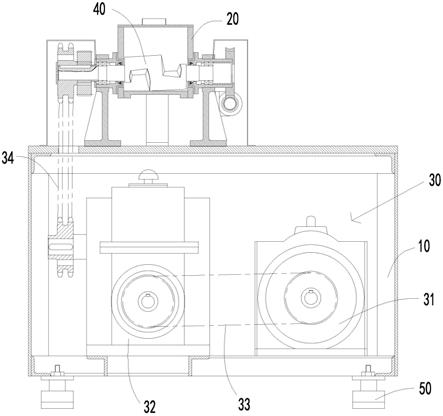
13.图1是本实用新型捏合机实施例提供的结构示意图;
14.图2是图1的捏合件结构示意图。
15.附图标记如下:
16.10、基座;
17.20、捏合斗;
18.30、驱动机构;31、驱动电机;32、减速箱;33、传动皮带;34、传动链条;
19.40、捏合件;41、捏合部;42、外凸位;421、外斜面;43、内凹位;431、内斜面;
20.50、防震脚。
具体实施方式
21.下面将结合本实用新型实施方式中的附图,对本实用新型实施方式中的技术方案进行清楚、完整地描述。
22.本实用新型提供了一种用于粉料和膏状或浓稠液体状物料混合的捏合机,其实施例如图1和图2所示,包括基座10和捏合斗20;基座10设有驱动机构30,驱动机构30用于驱动捏合斗20工作;捏合斗20内设有捏合件40,捏合件40与驱动机构30连接,捏合件40用于在驱动机构30的驱动下自转;捏合件40设有多个捏合部41,多个捏合部41沿捏合件40的轴向排列布置,多个捏合部41在捏合件40相对的两侧交错排列布置;捏合部41包括外凸位42和内凹位43,外凸位42往捏合件40的径向外延伸,内凹位43往捏合件40的径向内凹陷,外凸位42和内凹位43分别布置于捏合件40相对的两侧。
23.在此实施例中,捏合部41为两个,左侧捏合部41的外凸位42往上凸起,内凹位43往上凹陷,右侧捏合部41的外凸位42往下凸起,内凹位43往下凹陷,所以当捏合件40进行自转时,便会实现外凸位42和内凹位43的交替变换,能够形成向内和向外的挤压力,让粉状和膏状或浓稠液体状物料混合均匀,切实解决了现有技术无法实现粉状物料和膏状或浓稠液体状物料混合均一的问题。
24.优选的,外凸位42的外表面设有外斜面421,在往远离捏合部41相邻部位的方向上,外斜面421与捏合件40中心轴的间距呈线性递减。
25.在图1和图2所示方向中,左侧捏合件40的外斜面421呈左低右高的状态,右侧捏合件40的外斜面421也呈左低右高的状态,但由于捏合件40会进行自转,所以当捏合部41产生上下位置交替变换时,外斜面421能够在不同的位置对混合物进行斜向施力捏合,从而提高了捏合质量。
26.优选的,在内凹位43朝向的方向上,内凹位43两侧的间距呈线性递增。
27.此实施例的内凹位43大致呈敞口状,以围成更大的空间,便于容纳更多的物料进行捏合操作。
28.优选的,内凹位43的两侧之间设有内斜面431,在往远离捏合部41相邻部位的方向上,内斜面431与捏合件40中心轴的间距呈线性递减。
29.在图1和图2所示的方向中,左侧捏合件40的内斜面431呈左低右高的状态,右侧捏合件40的内斜面431也呈左低右高的状态,但由于捏合件40会进行自转,所以当捏合部41产生上下位置交替变换时,内斜面431能够在不同的位置对混合物进行斜向施力捏合,从而提高了捏合质量。
30.优选的,驱动机构30包括驱动电机31、减速箱32、传动皮带33和传动链条34;传动皮带33的一侧套于驱动电机31的输出端外,传动皮带33的另一侧套于减速箱32的输入端外,传动链条34的一侧套于减速箱32的输出端外,传动链条34的另一侧套于捏合件40的输入端外,以使驱动电机31的转动用于驱动捏合件40自转。
31.所以驱动电机31在进行工作时,能够将输出的动力经传动皮带33送至减速箱32,减速箱32能够将驱动电机31的高速转动变为低速转动输出,然后通过传动链条34带动捏合件40进行低速自转,以此实现粉状物料和膏状或浓稠液体状物料的充分捏合。
32.优选的,基座10的底部设有多个防震脚50,多个防震脚50分别设于基座10底部的边角处。
33.在增设防震脚50后,能够确保捏合机在工作运行时不会剧烈振动,为捏合机的长期稳定工作提供了保障。
34.以上所述是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1