一种颗粒捕集器的智能清洗装置的制作方法
1.本实用新型涉及柴油发动机排放后处理领域,具体涉及一种颗粒捕集器的智能清洗装置。
背景技术:
2.燃油燃烧会留下大量有害的残留物,目前柴油机国六排放标准对于pm(颗粒物)的限值更加严格。在柴油机的后端安装柴油颗粒捕集设备已经成为柴油机控制排放的主要方式,颗粒过滤器它通过表面和内部混合的过滤装置捕捉颗粒,能够净化排气中70%
‑
90%的颗粒,是净化柴油机颗粒物最有效、最直接的方法之一。
3.在颗粒捕集器使用过程中,虽然颗粒捕集器能过滤大部分颗粒,但是过滤器在工作过程中,颗粒物会积存在过滤器中,导致柴油机排气背压增加,当排气背压超过一定值时,柴油机工作开始明显恶化,导致发动机动力性和经济性等性能降低,必须及时除去沉积的微粒,使过滤器恢复到原来的工作状态,在颗粒捕集器的再生过程中,只是针对颗粒捕集器内部的积炭进行还原,而对于非积炭的灰分物质根本无法还原分解,这些灰分主要来源于机油和燃油中的成分,由于灰分不能燃烧,经过长时间积累,灰分附着堵塞颗粒捕集器,必须进行定期清灰等一系列保养维护恢复颗粒捕集器的部分性能。
4.目前并没有将颗粒捕集器的清洗效果进行验证,即目前获取的颗粒捕集器清洗效果仅限于获取清洗后的通气能力,而未考虑颗粒捕集设备出厂状态下的实际通气能力和清洗之前的通气能力与清洗后的通气能力的相对关系,即便采用清洗前后对照的方式对颗粒捕集器进行进气端和出气端的压差检测,也存在因设备老化导致透气性变差而无法准确验证颗粒捕集器的清洗效果。
技术实现要素:
5.为了解决现有技术中的一个或多个技术问题,或至少提供一种有益的选择,本实用新型提供一种颗粒捕集器的智能清洗装置,能够验证颗粒捕集器的清洗效果是否满足要求。
6.本实用新型公开的一种颗粒捕集器的智能清洗装置,包括:清洗仓和集尘仓;
7.清洗仓内设有固定座、喷嘴和移动机构,固定座用于固定颗粒捕集器,喷嘴连接压缩气源,以清洗颗粒捕集器,移动机构能够驱动喷嘴和固定座发生相对运动,以使喷嘴与颗粒捕集器的清灰端相对运动以完成清洗动作,清洗仓设有排灰口,排灰口连通颗粒捕集器的排灰端。
8.集尘仓内设有收集装置、排气装置以及连接收集装置、排气装置的阀组件,排气装置包括排气管道和排风设备,排气管道一端连接阀组件,排气管道另一端连接排风设备,阀组件连通排灰口,阀组件包括第一状态和第二状态,在第一状态,阀组件导通收集装置和排灰口,在第二状态,阀组件导通排气管道和排灰口。
9.还设有检测装置,检测装置包括压力检测装置和质量检测装置,压力检测装置在
靠近待测颗粒捕集器清灰端和排灰端的位置分别设置,以测量颗粒捕集器清洗前清灰端和排灰端压差值δp1和清洗后清灰端和排灰端压差值δp2,质量检测装置设于固定座以测量颗粒捕集器清洗前的质量m1和以测量颗粒捕集器清洗后的质量m2。
10.在优选的实施方式中,收集装置包括排灰管道、集尘箱,排灰管道包括进灰端和出灰端,进灰端连通排灰口,出灰端连通集尘箱,排灰管道的侧壁设有排气口,排气管道一端连通排气口,阀组件设于排灰管道且在第一状态,阀组件导通出灰端,在第二状态,阀组件导通所述排气口。
11.在优选的实施方式中,检测装置还包括流量计,流量计设于排风设备的抽气端,以测量排风设备的抽气流量。
12.在优选的实施方式中,排风设备为变频风机,排气装置还包括与变频风机和流量计连接的风机控制模块,风机控制模块根据流量计的流量值调整变频风机的速率以达到目标流量值。
13.在优选的实施方式中,还包括与压力检测装置和喷嘴分别连接的喷嘴控制模块,喷嘴控制模块根据压差值δp1和压差值δp2相对于出厂压差值的关系控制喷嘴的通断。
14.在优选的实施方式中,压力检测装置包括设于移动机构且由移动机构驱动至颗粒捕集器清灰端的第一压力传感器,和设于固定座的第二压力传感器。
15.在优选的实施方式中,清洗仓内设有多个固定座,移动机构包括分别驱动各固定座转动的旋转机构;或者,相邻固定座传动连接,旋转机构能够驱动固定座带动相邻固定座转动。
16.在优选的实施方式中,清洗仓设有对应各个颗粒捕集器的排灰端设置的多个排灰口,集尘仓内设有多个对应各排灰口的收集装置,排气管道包括多个并联的管路,各管路连通相应的收集装置。
17.在优选的实施方式中,移动机构包括旋转机构和水平移动机构,旋转机构能够驱动固定座做旋转运动,水平移动机构能够驱动喷嘴相对颗粒捕集器的清灰端做径向往复运动。
18.在优选的实施方式中,收集装置还包括连接袋,连接袋一端连接排灰管道的出灰端,另一端连接集尘箱。
19.由于采用了上述技术方案,本实用新型的有益效果在于:
20.1.本实用新型采用压缩气体吹扫颗粒捕集器清灰端的方式清洗颗粒捕集器内部蜂窝状的空隙,灰分等颗粒物从颗粒捕集器的排灰端被吹出,清洁方便。在移动机构的驱动下,喷嘴能够与固定座发生相对运动从而使喷嘴的清洗面积能覆盖整个颗粒捕集器的清灰端,集尘仓内的收集装置将颗粒物收集并进行统一倾倒处理。本技术还提供了评估清洗效果的检测装置,通过靠近颗粒捕集器的清灰端和排灰端的压力检测装置获取颗粒捕集器清洗前清灰端和排灰端压差值δp1,从而模拟测量清灰端内部气压值和排灰端内部气压值的压差值,能够获取清洗前颗粒捕集器的堵塞程度,即清洗前的通气能力。清洗后再次获取颗粒捕集器清灰端和排灰端压差值δp2,能够获得颗粒捕集器在清洗后的通气能力。将压差值δp1与压差值δp2进行比较分析,判断清洗效果是否达到要求。同时获取出厂参数中颗粒捕集器的压差值δp0作为基准,也可根据清洗后的通气能力判断颗粒捕集器能否满足后期使用的可靠性,以此保证柴油机满足排放标准。为避免设备老化导致颗粒捕集器的透气
性整体变差的情况,在固定座上还设有质量检测装置,通过质量变化来对清洗效果进行辅助评估,可提高评估效率和评估准确性。
21.2.本实用新型的收集装置分段设置,上部为连接件,具体为排灰管道,下部为集尘箱,用于收集颗粒物。阀组件设置于排灰管道,能够对气体进行分流,保证气体仅流向收集装置或者排气管道的其中一个。清洗过程中,通过阀组件关闭排灰管道的排气口,带有颗粒物的气体由排灰端进入集尘箱,对颗粒物进行统一倾倒处理。清洗结束,对颗粒捕集器进行检测,通过阀组件关闭排灰管道的排灰端,气体由排气口进入排气管道。
22.3.不同型号的颗粒捕集器需要不同速率的风机进行抽气,变频风机可适用于向不同型号的颗粒捕集器提供不同的抽气流量。进一步的,对于同一型号的颗粒捕集器,为保证测量结果的准确性,可以通过调整变频风机的速率,获取不同流量下的多个压力差值,通过多个样本的检测获取差值生成压差随流量变化的曲线,可显著提高检测精度。可以避免因颗粒捕集器等问题影响通气能力而被误认为清洗效果欠佳的问题。
23.4.本实用新型的智能清洗装置包括有多个固定座即包括多个工位可同时清洗多件颗粒捕集器。移动机构包括多个旋转机构,多个固定座可实现单独工作或者同时工作;或者相邻固定座之间以传动连接的方式,在多件颗粒捕集器需要同时清洗时,仅需要一套驱动设备驱动某一固定座,由该固定座带动相邻固定座完成旋转运动,装置简单、结构紧凑。
24.5.水平移动机构能够驱动喷嘴相对颗粒捕集器的清灰端做径向往复运动。通过水平移动机构和旋转机构的配合驱动下,直至喷嘴的喷射面积能覆盖整个颗粒捕集器清灰端,从而完成清洗过程。
附图说明
25.此处所说明的附图用来提供对本实用新型的进一步理解,构成本实用新型的一部分,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。在附图中:
26.图1为本实用新型一实施例中颗粒捕集器的智能清洗装置的外部图;
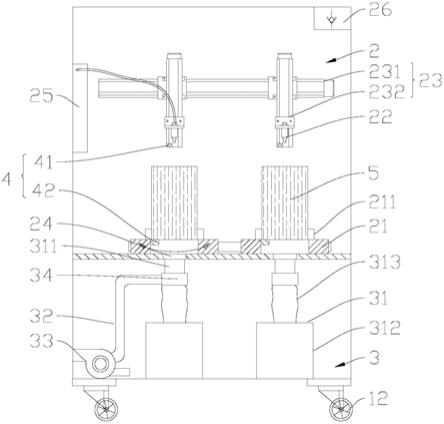
27.图2为本实用新型一实施例中颗粒捕集器的智能清洗装置的结构示意图。
28.附图标记说明:
29.1、箱体;11、门;12、滚轮;
30.2、清洗仓;21、固定座;211、夹持件;22、喷嘴;23、移动机构;231、水平移动机构;232、垂直移动机构;24、排灰口;25、压缩气源;26、单向阀;
31.3、集尘仓;31、收集装置;311、排灰管道;312、集尘箱;313、连接袋;32、排气管道;33、排风设备;34、阀组件;
32.4、检测装置;41、第一压力传感器;42、第二压力传感器;
33.5、颗粒捕集器。
具体实施方式
34.为了更清楚的阐释本实用新型的整体构思,下面再结合说明书附图以示例的方式进行详细说明。
35.需说明,在下面的描述中阐述了很多具体细节以便于充分理解本实用新型,但是,
本实用新型还可以采用其他不同于在此描述的其他方式来实施,因此,本实用新型的保护范围并不受下面公开的具体实施例的限制。
36.另外,在本实用新型的描述中,需要理解的是,术语“中心”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
37.在本实用新型中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。但注明直接连接则说明连接地两个主体之间并不通过过度结构构建连接关系,只通过连接结构相连形成一个整体。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
38.在本实用新型中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本实用新型的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。
39.具体采取的方案是:
40.如图1
‑
图2所示,本实用新型公开的一种颗粒捕集器5的智能清洗装置,包括有箱体1,箱体1前部设有可开合的门11,门11上设有可视窗,用于观察颗粒捕集器5的清洗状态,箱体1下端设有滚轮12,方便根据工作环境移动整个智能清洗装置。箱体1内包括:清洗仓2、集尘仓3和风机,清洗仓2位于集尘仓3的上方。
41.清洗仓2内设有固定座21、喷嘴22和移动机构23,固定座21安装于清洗仓2的底部,固定座21为中空的圆盘状,固定座21上端包括夹持件211用于固定颗粒捕集器5,夹持件211的夹持尺寸可调。比如固定座21上设有限位夹爪,可适用于夹持不同型号尺寸的颗粒捕集器5,或者,固定座21上沿颗粒捕集器5的径向设置有左右两个限位块和导向槽,两限位块在导向槽内相向移动以夹持固定颗粒捕集器5,从而同样可固定不同型号尺寸的颗粒捕集器5。喷嘴22连接压缩气源25,以清洗颗粒捕集器5,在一个实施方式中,喷嘴22连接有电磁脉冲阀,通过脉冲气流的震荡作用可使灰分等颗粒物脱离,易被彻底清除。待清洗的颗粒捕集器5包括清灰端和排灰端,其中,清灰端为出气口端,排灰端为进气口端。经过长时间的使用后,由于气流推力的作用下,大量的颗粒物积聚在出气口端,因此,将颗粒捕集器5倒置固定于固定座21,反吹颗粒捕集器5的出气口端,可以减轻疏通难度。移动机构23安装于清洗仓2的侧壁上,能够驱动喷嘴22和固定座21发生相对运动,以使喷嘴22与颗粒捕集器5的清灰端相对运动,从而使喷嘴22的喷射面积能覆盖整个颗粒捕集器5的清灰端以完成清洗动作。清洗仓2与排气仓相邻的底壁还设有排气孔,清洗仓2内的气体由排气孔排出。清洗仓2底部设有排灰口24,排灰口24连通颗粒捕集器5的排灰端。清洗仓2的上部设有单向阀26,仅允许空
气进入清洗仓2,一方面避免颗粒物逸出,另一面与排气装置配合形成单一流向的气流,从而模拟颗粒捕集器5使用工况下的气流情况。
42.集尘仓3内设有收集装置31、排气装置以及连接收集装置31、排气装置的阀组件34,排气装置包括排气管道32和排风设备33,排气管道32一端连接阀组件34,排气管道32另一端连接排风设备33,阀组件34连接排灰口24,在一个实施方式中,阀组件34为三通换向阀,阀组件34包括第一状态和第二状态,在第一状态,阀组件34导通收集装置31和排灰口24,隔断排气管道32和排灰口24;在第二状态,阀组件34导通排气管道32和排灰口24,隔断收集装置31和排灰口24。本领域技术人员可以理解的是,阀组件34也可以为两个单阀,分别为设于收集装置31进气端的第一单阀和设于排灰管道311进气端的第二单阀,在第一状态,第一单阀导通收集装置31和排灰口24,第二单阀隔断排气管道32和排灰口24;在第二状态,第一单阀导通排气管道32和排灰口24,第一单阀隔断收集装置31和排灰口24。排风设备具有多个抽气口,既能直接连通集尘仓抽取仓内的气体,也能够连通排气管道。
43.还设有检测装置4,检测装置4包括压力检测装置和质量检测装置,压力检测装置在靠近待测颗粒捕集器5清灰端和排灰端的位置分别设置,以测量颗粒捕集器5清洗前清灰端和排灰端压差值δp1和清洗后清灰端和排灰端压差值δp2,从而比较清洗前后的颗粒捕集器的透气性的好坏。为避免设备老化导致颗粒捕集器的透气性整体变差的情况,在固定座上设有质量检测装置(图中未示出)以测量颗粒捕集器清洗前的质量m1和以测量颗粒捕集器清洗后的质量m2,质量变化越大,表明清洗的越干净,通过质量变化来对清洗效果进行辅助评估,可提高评估效率和评估准确性。
44.可以理解的是,本实用新型中,对颗粒捕集设备不作具体限定,其不限于应用于柴油机的dpf(壁流式柴油机颗粒捕集器,diesel particulate fliter)设备,还包括cdpf(催化型柴油机颗粒捕集器,catalyzed diesel particulate filter)和scrf(涂覆scr催化剂颗粒捕集器,selective catalytic reduction on filter)设备等。
45.如图2所示,收集装置31包括排灰管道311、集尘箱312,排灰管道311包括进灰端和出灰端,进灰端连通排灰口24,出灰端连通集尘箱312,排灰管道311的侧壁设有排气口,排气管道32一端连通排气口,阀组件34设于排灰管道311且在第一状态,阀组件34导通出灰端,在第二状态,阀组件34导通所述排气口。
46.如图2所示,检测装置4还包括流量计,流量计设于排风设备33的抽气端,以测量排风设备33的抽气流量。流量计优选为质量流量计,可以理解的是,也可以采用体积流量计,而通过质量流量计能够保证检测的便捷性和准确性。以抽气流量为标准值,判定同一抽气流量下的颗粒捕集器5清洗前清灰端和排灰端压差值δp1和清洗后清灰端和排灰端压差值δp2与出厂压差值的关系。
47.如图2所示,排风设备33为变频风机,排气装置还包括与变频风机和流量计连接的风机控制模块,风机控制模块根据流量计的流量值调整变频风机的速率以达到目标流量值。
48.为了更准确的评估清洗效果是否达到要求,本实施例中,采集不同排气流量下多个待测颗粒捕集设备进气端内部气压值和出气端内部气压值,以及不同排气流量下多个待测颗粒捕集设备进气端内部气压值和出气端内部气压值,通过多个样本的检测获取差值以生成压差随流量变化的曲线,可显著提高检测精度。
49.如图2所示,还包括与压力检测装置和喷嘴22分别连接的喷嘴22控制模块(图中未示出),喷嘴22控制模块根据压差值δp1和压差值δp2相对于出厂压差值的关系控制喷嘴22的通断。根据压差值δp1和压差值δp2的大小关系可以评价清洗后与清洗前的透气性,但是对于清洗效果如何,有没有清洗干净,还需要和出厂参数中的压差值进行比较,如果和出厂压差值相差较远,则可认为清洗不彻底,需要再次启动喷嘴22进行清洗。本领域技术人员可以理解的是,可以根据出厂参数设定目标压差阈值δp0,若压差值δp2小于目标压差阈值δp0,则认为清洗效果好,清洗完成;若压差值δp2大于目标压差阈值δp0,则认为清洗效果差,再次启动喷嘴22进行清洗,并再次检测。
50.如图2所示,压力检测装置包括设于移动机构23且由移动机构23驱动至颗粒捕集器5清灰端的第一压力传感器41和设于固定座21的第二压力传感器42,第一压力传感器41测量颗粒捕集器5清灰端的气压压力,第二压力传感器42测量颗粒传感器排灰端的气压压力,从而计算压差值δp。
51.如图2所示,清洗仓2内设有多个固定座21,移动机构23包括分别驱动各固定座21转动的旋转机构;或者,相邻固定座21传动连接,旋转机构能够驱动固定座21带动相邻固定座21转动。同时,相应的,包括多个喷嘴22。移动机构23包括分别驱动各所述固定座21转动的旋转机构,从而多个固定座21可单独工作或者同时工作;或者相邻固定座21传动连接,例如,固定座21外周为圆柱齿轮形状,固定座21之间啮合传动,或者固定座21为轮状结构,各固定座21之间通过传动带进行传动。旋转机构能够驱动固定座21带动相邻固定座21转动。在多件颗粒捕集器5需要同时清洗时,仅需要一套驱动设备驱动某一固定座21,由该固定座21带动相邻固定座21完成旋转运动,装置简单、结构紧凑。
52.如图2所示,清洗仓2设有对应各个颗粒捕集器5的排灰端设置的多个排灰口24,集尘仓3内设有多个对应各排灰口24的收集装置31,排气管道32包括多个并联的管路(图中未画出),各管路连通相应的收集装置31。
53.如图2所示,移动机构23包括旋转机构和水平移动机构231,旋转机构能够驱动固定座21做旋转运动,水平移动机构231能够驱动喷嘴22相对颗粒捕集器5的清灰端做径向往复运动。在水平移动机构231和旋转机构的配合驱动下,喷嘴22的喷射面积能覆盖整个颗粒捕集器5的清灰端,从而完成清洗过程。在一个实施方式中,移动机构23还驱动第一喷嘴22升降的垂直移动机构232,垂直移动机构232驱动第一喷嘴22到达初始工作位置处,第一喷嘴22和颗粒捕集器5的清灰端之间的垂直距离为8
‑
20mm,水平移动机构23123驱动第一喷嘴22到达颗粒捕集器5的清灰端的中心处。第一喷嘴22由中心到边缘再返回中心完成一次径向往复运动后,固定座21带动颗粒捕集器5旋转一定角度,直至第一喷嘴22的喷射面积能覆盖整个颗粒捕集器5的清灰端从而完成清洗过程。
54.如图2所示,收集装置31还包括连接袋313,连接袋313一端连接排灰管道311的出灰端,另一端连接集尘箱312。连接袋313的袋体两端分别安装于排灰管道311与第一集尘箱312。本领域技术人员可以理解的是,设有多个工位的情况下,可以设有一个集尘箱312,多个连接袋313的出口端均连接该集尘箱312,也可以设有多个第一集尘箱312,各连接袋313的出口端分别连接相应的集尘箱312。连接袋313的袋体具有弹性,安装方便,另一方面,气流在连接袋313内遇到一定阻力,可降低气流速度,避免扬尘,部分灰尘碰到袋体后被袋体抖落到集尘箱312内,灰尘容易在集尘箱312内沉积。优选的,连接袋313采用过滤材质,连接
袋313的袋体能够过滤灰分等颗粒物,同时袋体具有细小的孔隙允许空气流通,部分气流在连接袋313处排出,也可以避免集尘箱312内扬尘。
55.参照图2对前述的智能清洗装置的工作过程做详细说明:
56.s1获取装载至固定座21的颗粒捕集器5的参数。调整夹持件211的夹持尺寸,将待清洗的颗粒捕集器5装载至固定座21上,通过预先建立的颗粒捕集器5型号的数据库,获取各型号的颗粒捕集器5的高度、端面半径等数据信息,或者通过传感器测量颗粒捕集器5的外廓尺寸,以此确定高度、端面直径等数据信息;
57.s2根据颗粒捕集器5的参数确定移动机构23的径向运动距离,根据径向运动距离生成移动机构23的预设工作路径;
58.s3发送控制指令至移动机构23,以使移动机构23带动喷嘴22移动至颗粒捕集器5的清灰端的中心处;
59.s4压力检测装置获取颗粒捕集器5清洗前清灰端和排灰端的气压,获得压差值δp1;
60.s5发送控制指令至移动机构23和喷嘴22,以使喷嘴22喷射压缩气流对颗粒捕集器5进行清洗;
61.s6检测装置4获取颗粒捕集器5清洗前清灰端和排灰端的气压,获得压差值δp2;
62.s7判断颗粒捕集器5清洗后压差值δp2是否小于颗粒捕集器5清洗前清灰端和排灰端压差值δp1且小于目标压差阈值δp0;
63.s8若判断结果为是,则判定对颗粒捕集器5的清洗效果好;
64.s9若判断结果为否,则判定对颗粒捕集器5的清洗效果差,执行步骤s5。
65.本实用新型所保护的技术方案,并不局限于上述实施例,应当指出,任意一个实施例的技术方案与其他一个或多个实施例中技术方案的结合,在本实用新型的保护范围内。虽然,上文中已经用一般性说明及具体实施例对本实用新型作了详尽的描述,但在本实用新型基础上,可以对之作一些修改或改进,这对本领域技术人员而言是显而易见的。因此,在不偏离本实用新型精神的基础上所做的这些修改或改进,均属于本实用新型要求保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1