一种平流沉砂池的自动除砂车的制作方法
1.本实用新型涉及污水处理领域,具体指一种平流沉砂池的自动除砂车。
背景技术:
2.污水处理是为使污水达到排水某一水体或再次使用的水质要求,并对其进行净化的过程。污水处理被广泛应用于建筑、农业,交通、能源、石化、环保、城市景观、医疗、餐饮等各个领域,也越来越多地走进寻常百姓的日常生活。污水处理行业的上游供应商主要是污水处理设备的制造商和污水处理药剂供应商,都属于发展较快,需求状况良好的行业。
3.在污水处理领域中,污水的处理一般经过以下几个阶段:污水进入污水处理厂后,先经过粗格栅对污水进行过滤,去除大块杂质;再经过细格栅对污水进行过滤,去除污水中小块杂质;再将过滤后的污水依次经过沉砂池、生化池、高密池和消毒池进行相应的处理,最后将污水排入水体。
4.其中沉砂池通常包括平流沉砂池、曝气沉砂池和旋流沉砂池等。平流沉砂池是污水处理工艺中物理方法沉砂池的一种,主要作用是去除污水中粒径大于0.2mm,密度大于2.65t/立方米的砂粒,以保护管道、阀门等设施免受磨损和阻塞,其工作原理是以重力分离为基础。
5.现有技术中,采用吸砂泵来对平流沉砂池内的沙粒进行抽取,然后将沙粒排放至沙水分离器中进行分离,运输的距离较远,导致采用此方法分离的效率较低,且平流沉砂池内的沙粒清除不够彻底。
技术实现要素:
6.针对现有技术存在的上述问题,本实用新型要解决的技术问题是:平流沉砂池池底的砂粒去除困难。
7.为解决上述技术问题,本实用新型采用如下技术方案:一种平流沉砂池的自动除砂车,包括壳体、抽砂结构、细格栅和多个滚轮;所述抽砂结构包括单杆液压缸、抽砂盘、吸砂泵和导管;所述单杆液压缸竖直设于壳体下方,所述单杆液压缸的缸体与壳体的下方固定连接。
8.所述抽砂盘具有下端开口的腔体,且腔体下端的开口朝向平流沉砂池;所述抽砂盘上端面与单杆液压缸的液压杆固定连接;所述导管的一端与抽砂盘的腔体连通,且所述导管上设有吸砂泵。
9.所述细格栅设于壳体内,所述细格栅与壳体固定连接,且所述细格栅与壳体底部平行;所述细格栅将壳体分为上下两个区域,所述细格栅上方区域为处理区,所述细格栅下方区域为排水区;所述导管的另一端与处理区连通,所述壳体下端设有通孔。
10.所述壳体下端设有多个滚轮。
11.本实用新型中,单杆液压缸带动抽砂盘向下移动,使得抽砂盘的下端开口与平流沉砂池池底贴合,吸砂泵通过与抽砂盘连通的导管将抽砂盘内的沙砾抽至壳体内的处理区
内,砂粒通过壳体内的细格栅将污水过滤至排水区内,通过壳体下端开的通孔流入平流沉砂池内。吸砂泵抽完后,滚轮带动壳体移动到下一个区域,对平流沉砂池的下一个区域进行处理。
12.作为优选,所述吸砂泵和导管的个数为多个。根据平流分砂池内砂粒的多少,设置相应个数的吸砂泵和导管,以此保证自动除砂车的工作效率。
13.作为优选,还包括挤压板,所述挤压板与细格栅平行,且所述挤压板设于细格栅上方,所述挤压板的边与壳体的竖直面贴合,所述挤压板与壳体上下滑动连接。挤压板上下动作,使得挤压板对处理区内的砂粒进行挤压,加快砂粒与污水的分离速度。
14.作为优选,还包括除砂结构;所述除砂结构包括刮砂板和密封板;所述刮砂板竖直设于细格栅和挤压板之间,所述刮砂板与壳体左右滑动连接,且所述刮砂板与壳体左右侧面平行,所述刮砂板的前后两边分别与壳体的前后竖直面贴合;所述刮砂板的下边与细格栅贴合;所述刮砂板也可以通过齿轮齿条或双杆液压缸带动在壳体内左右滑动连接。所述壳体左侧开有通槽,所述通槽的下侧面与细格栅平齐;刮砂板动作,将砂粒从通槽内刮出。所述密封板设于壳体内,且所述密封板与壳体左侧面贴合,所述密封板的上端穿过壳体上端面,且所述密封板与壳体上下滑动连接;所述密封板向下滑动时,将通槽堵住,向上滑动时,通槽打开。
15.作为优选,所述除砂结构还包括储砂箱;所述储砂箱固定设于壳体左侧,且所述储砂箱设于通槽的下方;所述储砂箱设有上端开口的腔体。砂粒从通槽排出,在重力势能的作用下,通过储砂箱上端开口处下落至储砂箱内。
16.作为优选,所述刮砂板的上端面具有沿刮砂板长度方向的长槽,所述长槽内设有伸缩板,所述伸缩板的下端面与长槽底面之间设有弹簧,所述伸缩板的上端面与挤压板贴合。所述弹簧将伸缩板向长槽外顶出,可以减小细格栅与挤压板两者之间的间距,使得在挤压时能够有更多的挤压空间。
17.作为优选,所述储砂箱竖直侧壁和底侧壁也为格栅结构。方便对挤压后的砂粒进行再次过滤,进一步提高污水回收率。
18.作为优选,还包括自动控制结构;所述自动控制结构包括plc、液位传感器和压力传感器;所述液位传感器和压力传感器设于壳体内的处理区内;所述plc的信号输入端分别与液位传感器和压力传感器连接;所述plc的控制信号输出端分别与单杆液压缸、挤压板、刮砂板、密封板和多个滚轮的驱动部件连接,所述plc的控制信号输出端与吸砂泵电连接。通过液位传感器和压力传感器采集的数据,以此来实现plc对单杆液压缸、挤压板、刮砂板、密封板、吸砂泵和多个滚轮的自动控制。
19.相对于现有技术,本实用新型至少具有如下优点:
20.1.能够将平流沉砂池内的砂粒清理干净。本实用新型中,通过单杆液压缸调整抽砂盘的上下位置,使得抽砂盘将平流沉砂池内的砂粒框选,形成一个密闭空间,并通过吸砂泵将密闭空间内的砂粒抽出,通过导管排至处理区内。
21.2.污水与砂粒的分离效率高。本实用新型中,通过挤压板将处理区内的砂粒污水混合物进行挤压,污水通过细格栅排入排水区内,并通过刮砂板将挤压后和砂粒排至储砂箱内,储砂箱再次通过格栅柜砂粒进型过滤,减少了污水的浪费,提高了污水的回收率。
附图说明
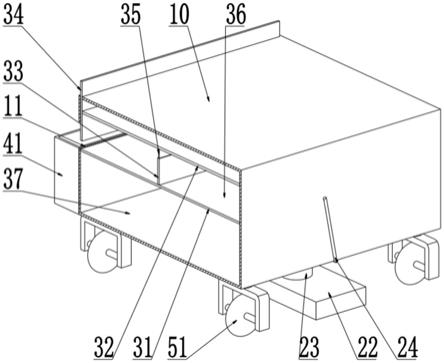
22.图1为实施例的整体装置的立体图。
23.图2为实施例的整体装置的主视图。
24.图中,10
‑
壳体,11
‑
通槽,21
‑
单杆液压缸,22
‑
抽砂盘,23
‑
,吸砂泵,24
‑
导管,31
‑
细格栅,32
‑
挤压板,33
‑
刮砂板,34
‑
密封板,35
‑
伸缩板,36
‑
处理区,37
‑
排水区,41
‑
储砂箱,51
‑
滚轮。
具体实施方式
25.下面结合附图对本实用新型作进一步的详细说明。
26.本实用新型中
‘
前’、
‘
后’、
‘
左’、
‘
右’、
‘
上’、
‘
下’均指在图1中的方位,其中
‘
前’是指在图1中相对于纸面朝外,
‘
后’是指在图1中相对于纸面朝里。在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“设置有”、“套设/接”、“连接”等,应做广义理解,例如“连接”,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
27.参见图1
‑
2,本实用新型提供的一个实施例:一种平流沉砂池的自动除砂车,包括壳体10、抽砂结构、细格栅31和多个滚轮51;所述抽砂结构包括单杆液压缸21、抽砂盘22、吸砂泵23和导管24;所述单杆液压缸21竖直设于壳体10下方,所述单杆液压缸21的缸体与壳体10的下方固定连接;
28.所述抽砂盘22具有下端开口的腔体,且腔体下端的开口朝向平流沉砂池;具体实施时,所述抽砂盘22可以为长方体结构,方便抽砂盘22对平流沉砂池池底进行抽渣。所述抽砂盘22上端面与单杆液压缸21的液压杆固定连接;所述导管24的一端与抽砂盘22的腔体连通,且所述导管24上设有吸砂泵23;具体实施时,吸砂泵23动作,吸砂泵23对抽砂盘22腔体结构内的砂粒进行抽取,砂粒进入吸砂泵23后,通过导管24排出。
29.所述细格栅31设于壳体10内,所述细格栅31与壳体10固定连接,且所述细格栅31与壳体10底部平行;所述细格栅31将壳体10分为上下两个区域,所述细格栅31上方区域为处理区36,所述细格栅31下方区域为排水区37;所述导管24的另一端与处理区36连通,具体实施时,吸砂泵23通过导管24将抽砂盘22内的污水抽入至处理区36内。所述壳体10下端设有通孔;具体实施时,排水区37内的污水在重力的作用下通过通孔流入平流沉砂池内。
30.所述壳体10下端设有多个滚轮51。具体实施时,滚轮51带动壳体10在平流沉砂池内移动,以此来对平流沉砂池内的砂粒进行清除。
31.进一步地,所述吸砂泵23和导管24的个数为多个。具体实施时,根据平流分砂池内砂粒的多少,设置相应个数的吸砂泵23和导管24,以此保证自动除砂车的工作效率。
32.进一步地,还包括挤压板32,所述挤压板32与细格栅31平行,且所述挤压板32设于细格栅31上方,所述挤压板32的边与壳体10的竖直面贴合,所述挤压板32与壳体10上下滑动连接。具体实施时,所述挤压板32与壳体10可以通过齿轮齿条滑动连接,所述齿轮齿条由电机带动,所述电机的输出轴固定设于壳体10外侧,所述电机的输出轴穿过壳体10且与壳体10可转动连接,所述电机的输出轴的端面固定设有齿轮,所述齿条通过两个固定块竖直
设于壳体10内部,所述齿条与两个固定块滑动连接,所述齿条与齿轮啮合,所述齿条与挤压板32固定连接,电机转动时,通过齿轮齿条带动挤压板32上下移动。也可以通过双杆液压缸滑动连接,所述双杆液压缸竖直设于壳体10内部,所述双杆液压缸的液压杆两端分别与壳体10固定连接,所述挤压板32与双杆液压缸的缸体固定连接,双杆液压缸动作时,双杆液压缸的缸体在双杆液压缸的液压杆上移动,从而带动挤压板32上下动作,使得挤压板32对处理区36内的砂粒进行挤压,加快砂粒与污水的分离速度。
33.进一步地,还包括除砂结构;所述除砂结构包括刮砂板33和密封板34;所述刮砂板33竖直设于细格栅31和挤压板32之间,所述刮砂板33与壳体10左右滑动连接,且所述刮砂板33与壳体10左右侧面平行,所述刮砂板33的前后两边分别与壳体10的前后竖直面贴合;所述刮砂板33的下边与细格栅31贴合;具体实施时,所述刮砂板33也可以通过齿轮齿条或双杆液压缸带动在壳体10内左右滑动连接。所述壳体10左侧开有通槽11,所述通槽11的下侧面与细格栅31平齐;具体实施时,刮砂板33动作,将砂粒从通槽11内刮出。所述密封板34设于壳体10内,且所述密封板34与壳体10左侧面贴合,所述密封板34的上端穿过壳体10上端面,且所述密封板34与壳体10上下滑动连接;具体实施时,所述密封板34向下滑动时,将通槽11堵住,向上滑动时,通槽11打开。
34.进一步地,所述除砂结构还包括储砂箱41;所述储砂箱41固定设于壳体10左侧,且所述储砂箱41设于通槽11的下方;所述储砂箱41设有上端开口的腔体。具体实施时,砂粒从通槽11排出,在重力势能的作用下,通过储砂箱41上端开口处下落至储砂箱41内,工作人员定时对储砂箱41内的砂粒进行清理。
35.进一步地,所述刮砂板33的上端面具有沿刮砂板33长度方向的长槽,所述长槽内设有伸缩板35,所述伸缩板35的下端面与长槽底面之间设有弹簧,所述伸缩板35的上端面与挤压板32贴合。具体实施时,所述弹簧将伸缩板35向长槽外顶出,可以减小细格栅31与挤压板32两者之间的间距,使得在挤压时能够有更多的挤压空间。
36.进一步地,所述储砂箱41竖直侧壁和底侧壁也为格栅结构。方便对挤压后的砂粒进行再次过滤,进一步提高污水回收率。
37.进一步地,还包括自动控制结构;所述自动控制结构包括plc、液位传感器和压力传感器;所述液位传感器和压力传感器设于壳体10内的处理区36内;所述plc的信号输入端分别与液位传感器和压力传感器连接;所述plc的控制信号输出端分别与单杆液压缸21、挤压板32、刮砂板33、密封板34和多个滚轮51的驱动部件连接,所述plc的控制信号输出端与吸砂泵23电连接。通过液位传感器和压力传感器采集的数据,以此来实现plc对单杆液压缸21、挤压板32、刮砂板33、密封板34、吸砂泵23和多个滚轮51的自动控制。
38.本实用新型限定的一种平流沉砂池的自动除砂车的工作原理如下:
39.可人工控制也可以自动控制:
40.人工控制时,通过滚轮51将壳体10移动到平流沉砂池中需要处理的区域,然后打开单杆液压缸21开关,控制单杆液压缸21伸长,从而带动抽砂盘22的下端开口与平流沉砂池的池底贴合,然后打开吸砂泵23的开关,吸砂泵23通过与抽砂盘22连通的导管24将抽砂盘22内的沙砾抽至壳体10内的处理区36内。
41.然后打开挤压板32的驱动部件的开关,挤压板32的驱动部件带动挤压板32向下动作,对处理区36内抽入的砂粒进行挤压,使得处理区36内的砂粒与污水快速分离,污水从细
格栅31流入排水区37内,与此同时,伸缩板35向下移动,进入刮砂板33的长槽内,增大挤压板32的压缩空间,然后通过壳体10下端开的通孔流入平流沉砂池内。挤压完成后,控制挤压板32回到初始位置,与此同时,挤压板32通过弹簧向上移动。
42.然后打开密封板34的驱动部件的开关,密封板34的驱动部件带动密封板34向上移动,从而将通槽11露出,与此同时,关闭抽砂泵22,打开刮砂板33的驱动部件的开关,刮砂板33的驱动部件带动刮砂板33向左移动,对处理区36内的砂粒通过通槽11刮出;砂粒在重力势能的作用下,掉落至储砂箱41内,储砂箱41的格栅结构对砂粒进行再一次的过滤,进一步提高污水回收率。刮砂板33将处理区36内的砂粒刮完后,通过控制刮砂板33与密封板34的驱动部件的开关,使得刮砂板33与密封板34回到初始位置。
43.然后通过滚轮51将壳体10移动到平流沉砂池中需要处理的下一个区域,直至将平流沉砂池内的砂粒处理完成,工作人员定时对储砂箱41内的砂粒进行清理,防止储砂箱41的砂粒过多,导致砂粒从储砂箱41上端的开口漏出至平流沉砂池内。
44.自动控制时,plc控制滚轮51的驱动部件,从而控制滚轮51转动,将壳体10移动到平流沉砂池中需要处理的区域,然后plc控制单杆液压缸21伸长,从而带动抽砂盘22的下端开口与平流沉砂池的池底贴合,然后plc控制打开吸砂泵23动作,吸砂泵23通过与抽砂盘22连通的导管24将抽砂盘22内的沙砾抽至壳体10内的处理区36内。当处理区36被填满时,液位传感器给plc发出信号,使得plc控制吸砂泵23停止动作。
45.然后plc控制挤压板32的驱动部件,控制挤压板32向下动作,对处理区36内抽入的砂粒进行挤压,使得处理区36内的砂粒与污水快速分离;污水从细格栅31流入排水区37内,然后通过壳体10下端开的通孔流入平流沉砂池内;与此同时,伸缩板35向下移动,进入刮砂板33的长槽内,增大挤压板32的压缩空间;当达到一定压力时,处理区36内的压力传感器给plc发出信号,plc控制挤压板32的驱动部件动作,控制挤压板32回到初始位置;与此同时,挤压板32通过弹簧向上移动。
46.然后plc控制密封板34的驱动部件动作,控制密封板34向上移动,从而将通槽11露出,与此同时,plc控制刮砂板33的驱动部件的动作,控制刮砂板33向左移动,对处理区36内的砂粒通过通槽11刮出;砂粒在重力势能的作用下,掉落至储砂箱41内,储砂箱41的格栅结构对砂粒进行再一次的过滤,进一步提高污水回收率。刮砂板33将处理区36内的砂粒刮完后,plc控制刮砂板33与密封板34的驱动部件动作,使得刮砂板33与密封板34回到初始位置。
47.然后plc控制单杆液压缸21缩短,从而带动抽砂盘22向上移动,与此同时,plc控制滚轮51的驱动部件,滚轮51将壳体10移动到平流沉砂池中需要处理的下一个区域,直至将平流沉砂池内的砂粒处理完成;具体实施时,根据抽砂盘22内腔体的大小和处理区36的大小来控制控制单杆液压缸21的伸缩和滚轮51的移动,使得处理区36能够被砂粒填满,进一步提高工作效率。
48.工作人员定时对储砂箱41内的砂粒进行清理,防止储砂箱41的砂粒过多,导致砂粒从储砂箱41上端的开口漏出至平流沉砂池内。
49.最后说明的是,以上实施例仅用以说明本实用新型的技术方案而非限制,尽管参照较佳实施例对本实用新型进行了详细说明,本领域的普通技术人员应当理解,可以对本实用新型的技术方案进行修改或者等同替换,而不脱离本实用新型技术方案的宗旨和范
围,其均应涵盖在本实用新型的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1