一种喷涂机器人的制作方法
1.本实用新型属于喷涂装置的技术领域,特别涉及一种喷涂机器人。
背景技术:
2.喷涂机器人是可进行自动喷漆或喷涂其他涂料的工业机器人,1969 年由挪威trallfa公司发明。喷漆机器人主要由机器人本体、计算机和相应的控制系统组成,液压驱动的喷漆机器人还包括液压油源,如油泵、油箱和电机等。多采用5或6自由度关节式结构,手臂有较大的运动空间,并可做复杂的轨迹运动,其腕部一般有2~3个自由度,可灵活运动。较先进的喷漆机器人腕部采用柔性手腕,既可向各个方向弯曲,又可转动,其动作类似人的手腕,能方便地通过较小的孔伸入工件内部,喷涂其内表面。喷漆机器人一般采用液压驱动,具有动作速度快、防爆性能好等特点,可通过手把手示教或点位示数来实现示教。喷漆机器人广泛用于汽车、仪表、电器、搪瓷等工艺生产部门。
3.目前,喷涂机器人的涂料管和气管上都是直接固定在机器人的大臂或者小臂上。以至于实际生产过程中随着机器人的高速运动时,会跟随机器人运动导致涂料管或者气管之间损和老化加快。如何避免管路在机器人手臂作业时发生摩擦成为本实用新型有待解决的技术问题。
技术实现要素:
4.本实用新型的目的是提供一种喷涂机器人,解决了避免机器人手臂作业时,管路摩擦磨损的技术问题。
5.本实用新型提供的技术方案如下:
6.一种喷涂机器人,包括机器人本体与喷枪;所述机器人本体包括依次连接的第一驱动机构、第二驱动机构、大臂、第三驱动机构、小臂和机械手腕,所述喷枪固定在所述机械手腕上,且所第一驱动机构用于使所述第二驱动结构在水平方向旋转,所述第二驱动机构用于使所述大臂在竖直面上绕所述第二驱动机构旋转,所述第三驱动机构用于使所述小臂绕所述第三驱动机构在竖直面上旋转;
7.所述机器人本体外侧设有与所述喷枪相连的涂料管与气管;对应所述第一驱动机构、大臂、小臂的位置处分别通过若干第一固定件将所述涂料管与所述气管固定在所述第一驱动机构、大臂、第三驱动机构上;
8.所述涂料管和气管位于所述第二驱动机构与临近所述大臂之间的自由段,以及所述第三驱动机构临近所述大臂之间的自由段通过若干可调节位置的第二固定件固定,以使所述自由段的涂料管与气管间隔设置。
9.按照立体空间的位置关系,第一驱动电机位于整个喷涂机器人的最下端,作为整个喷涂机器人的安装基础和支撑固定点。第一驱动机构、第二驱动机构、大臂、第三驱动机构和小臂以及机械手腕从下至上依次设置。多关节喷涂机器人本体可设置多个电机,对个部分分别进行供能,使得对位置的控制更加准确和精确。例如,第二驱动电机可以相对于第
一驱动电机作水平平面内的旋转,以带动喷枪左右运动;大臂可以围绕第二驱动电机在竖直平面内旋转,以带动喷枪向前或向后运动;同时,小臂以及第三驱动电机可以围绕大臂在竖直平面内做旋转,以带动喷枪向上或向下运动。
10.同时,喷涂机器人外设有喷枪相连的喷涂管。电机线给电机供电,以带动整个喷涂机器人的运作。另外,喷涂管由喷涂机器人的底部连接至喷枪,喷涂管一端与喷涂涂料源头相连,一端与喷枪相连;在符合喷涂条件时,喷涂管被控制从喷涂涂料源头吸取涂料,并传送至喷枪,由喷枪喷出。
11.喷涂管分为涂料管与气管,涂料管内满是待喷涂的涂料,气管内通气体,作业时高压空气可以带着涂料喷射出去,通过控制气管内喷出气体的时速控制涂料的喷涂效率。
12.涂料管与气管同起点,同终点,但是并行的两根管路在机器人作业是无可避免的会发生相对位移,甚至发生摩擦。随着时间的推移,管路甚至可以因磨损而贯穿,造成不必要的麻烦,故在本技术方案中通过合理的设置第一固定件和第二固定件,在大臂、小臂以及第二驱动机构上设置第一固定件,将涂料管和气管进行固定,而对小臂和大臂之间的涂料管与气管的自由段,以及大臂和第二驱动机构之间的涂料管与气管的自由段通过第二固定件进行固定分隔,从而避免涂料管和气管之间发生摩擦;本技术文件中通过在第一驱动机构以及第三驱动机构以及大臂上设置第一固定件,避免在喷涂机械人高速运动的时候,涂料管和气管会对喷涂机器人的作业产生大的干涉;第三驱动机构与大臂上临近的第一固定件之间形成的自由段以及第二驱动机构与大臂上临近的第一固定件之间形成的自由段在喷涂机器人运动时,也会造成两管之间发生摩擦,长久的作业不仅会产生干涉,而且还会使管路发生破损;本技术文件中通过设置可调节位置的第二固定件,第二固定件不仅固定了自由段的涂料管和气管,且将涂料管和气管分隔开,以避免涂料管和气管自由段部分发生相互摩擦,从而有效的保护了喷涂设备。
13.作为优化地,位于所述大臂上的第一固定件为两组,且所述大臂上的两组所述第一固定件分别位于远离第二驱动机构和第三驱动机构的一侧间隔设置。
14.本技术方案中,在大臂远离第二驱动机构和第三驱动机构的一侧设置两组第一固定件,将涂料管和气管固定在大臂上,且位于大臂上的第一固定件分别临近所述第二驱动机构和第三驱动机构设置,缩短了自由段的长度,这样就避免在运动的过程中,涂料管和气管不会对喷涂机器人的运动造成影响;在配合第二固定件的固定和分隔,更加有效的对涂料管和气管进行了保护。
15.作为优化地,所述第二固定件位于所述自由段的中部设置。
16.本技术方案中将第二固定件设置在自由段的中部,以使在使用的过程中,能够尽可能的减少第二固定件的使用,同时还能够有效的保护涂料管和气管。
17.作为优化地,所述第二固定件包括第一固定部和第二固定部和锁紧件;所述锁紧件将所述第一固定部和所述第二固定部配合锁紧形成用于涂料管与气管穿过的第一管路通孔与第二管路通孔,且所述第一管路通孔与所述第二管路通孔间隔设置。
18.作为优化地,所述第一固定件和所述第二固定件将所述涂料管和所述气管并行固定;所述涂料管与气管均为波纹管;所述第一管路通孔与第二管路通孔内均设有用于与波纹管贴合的波纹状凹槽。
19.在本技术方案中,通过将第一管路通孔和第二管路通孔设置成波纹状凹槽,以使
所述第一管路通孔和第二管路通孔能够更好的与涂料管或者气管进行更好的匹配固定,避免固定后的涂料管和气管出现晃动发生摩擦,从而对涂料管和气管起到更好的保护作用。
20.作为优化地,所述第一固定部设有第一凹槽、第二凹槽、第一通孔与第二通孔;
21.所述第二固定部设有第三凹槽、第四凹槽、第三通孔与第四通孔;
22.所述第一凹槽与第三凹槽对应设置,形成第一管路通孔;
23.第二凹槽与第四凹槽对应设置,形成第二管路通孔;
24.所述第一通孔与第三通孔对应设置,形成第一锁紧孔;
25.第二通孔与第四通孔对应设置,形成第二锁紧孔;
26.所述第一锁紧孔位于远离第二管路通孔一侧,所述第二锁紧孔位于远离第一管路通孔一侧。
27.作为优化地,所述第一固定部还包括第五通孔,所述第二固定部还包括第六通孔;
28.所述第五通孔与第六通孔对应设置,形成第三锁紧孔;
29.所述第三锁紧孔设于第一锁紧孔与第二锁紧孔之间。
30.作为优化地,所述锁紧件为螺栓,所述第一通孔、第二通孔以及第五通孔均分为两段锁紧段和容置段,所述锁紧段用于锁紧件锁紧,所述容置段用于容置所述螺栓头。
31.作为优化地,所述第二固定件的四个角呈倒角设置。
32.本案中通过将第二固定件的四个角设置成倒角的形状,避免第二固定件的四周对运动中的涂料管或者气管造成损伤。
33.作为优化地,所述第二固定件为pom乙缩醛共聚物材质。
34.本方案中通过将第二固定件采用pom乙缩醛共聚物材质进行处理,能够有效减轻第二固定件的重量,从而使喷涂机器人在运动的过程中能够更好的起到保护作用。
35.有益效果:本实用新型的波纹第二固定件用于将两根(或两根以上) 波纹管路相对固定,使其不易松动,减少波纹管的相对晃动,进而实现降低磨损,延长波纹管使用寿命,降低更换频率的目的。
36.本实用新型波纹管路通孔内设有与波纹管路贴合的波纹状凹槽,此凹槽的设置个与波纹管路的外表面契合,当螺栓并未完全拧紧时也不会发生相对晃动,波纹管外表面的波纹是均匀等距有序排列的,因此不会发生无法贴合的情况。
附图说明
37.下面将以明确易懂的方式,结合附图说明优选实施方式,对一种波纹第二固定件的上述特性、技术特征、优点及其实现方式予以进一步说明。
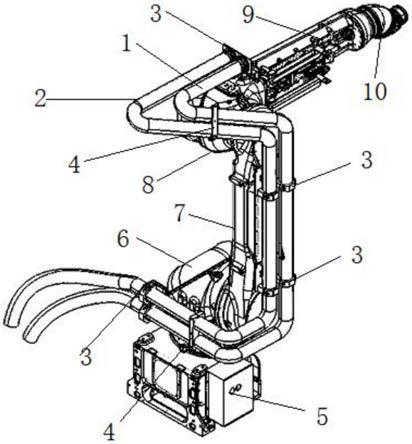
38.图1为本实用新型喷涂机器人的结构示意图;
39.图2为第二固定件一视角结构示意图;
40.图3为第二固定件一视角结构示意图。
41.附图标号说明
42.1-涂料管;2-气管;3、第一固定件;4-第二固定件;41-第一固定部; 411-第一凹槽;412-第二凹槽;413-第一通孔;414-第二通孔;415-第五通孔;42-第二固定部;421-第三凹槽;422-第四凹槽;423-第三通孔;424
‑ꢀ
第四通孔;425-第六通孔;5第一驱动机构;6-第二驱动机构;7-大臂;8 第三驱动机构;9-小臂;10-机械手腕。
具体实施方式
43.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对照附图说明本实用新型的具体实施方式。显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图,并获得其他的实施方式。
44.如图1所示,一种喷涂机器人,包括机器人本体与喷枪;机器人本体包括电机与依次连接的第一驱动电机、第二驱动电机、大臂7、第三驱动电机、小臂9和机械手腕10,喷枪固定在机械手腕10上;
45.且所第一驱动机构5用于使第二驱动结构在水平方向旋转,第二驱动机构 6用于使大臂7在竖直面上绕第二驱动机构6旋转,第三驱动机构8用于使小臂9绕第三驱动机构8在竖直面上旋转;
46.机器人本体外侧设有与喷枪相连的涂料管1与气管2;对应第一驱动机构5、大臂7、小臂9的位置处分别通过第一固定件3将涂料管1与气管 2固定在第一驱动机构5、大臂7、第三驱动机构8上;在具体实施时,第二驱动机构6、第三驱动机构8以及大臂7上的固定位置不限,第二驱动机构6通过支架进行固定住第一固定件3,以使第一固定件3固定后的涂料管1和气管2与第二驱动机构6之间存在一定的距离,避免在运动的过程中涂料管1和气管2与第二驱动机构6造成干涉。而对于大臂7以及第第三驱动机构8上的第一固定件3可直接固定,当然,对于其他方式的固定方式在此也不做过多的限定。
47.涂料管1和气管2位于第二驱动机构6与临近大臂7之间的自由段,以及第三驱动机构8临近大臂7之间的自由段通过若干可调节位置的第二固定件4固定,以使自由段的涂料管1与气管2间隔设置;在具体实施时,对于喷涂机器人上的涂料管1和气管2的自由段的长度与机器人的运动范围相适配,涂料管1和气管2上的自由段的长度适宜,避免在运动的过程中,自由段的长短对喷涂机器人的运动造成影响。
48.具体实施时,位于大臂7上的第一固定件3为两组,且大臂7上的两组第一固定件3分别位于远离第二驱动机构6和第三驱动机构8的一侧间隔设置;具体实施时,两组固定件分别临近第二驱动机构6以及第三驱动机构8设置,这样能够有效的保证自由段的设置长度比较适宜。
49.按照立体空间的位置关系,第一驱动电机位于整个喷涂机器人的最下端,作为整个喷涂机器人的安装基础和支撑固定点。第一驱动电机、第二驱动电机、大臂7、第三驱动电机和小臂9以及机械手腕10从下至上依次设置。多关节喷涂机器人本体可设置多个电机,对个部分分别进行供能,使得对位置的控制更加准确和精确。例如,第二驱动电机可以相对于第一驱动电机作水平平面内的旋转,以带动喷枪左右运动;大臂7可以围绕第二驱动电机在竖直平面内旋转,以带动喷枪向前或向后运动;同时,小臂 9以及第三驱动电机可以围绕大臂7在竖直平面内做旋转,以带动喷枪向上或向下运动。
50.同时,喷涂机器人外设有喷枪相连的喷涂管。电机线给电机供电,以带动整个喷涂机器人的运作。另外,喷涂管由喷涂机器人的底部连接至喷枪,喷涂管一端与喷涂涂料源头相连,一端与喷枪相连;在符合喷涂条件时,喷涂管被控制从喷涂涂料源头吸取涂料,并传送至喷枪,由喷枪喷出。
51.喷涂管分为涂料管1与气管2,涂料管1内满是待喷涂的涂料,气管 2内通气体,作
业时高压空气可以带着涂料喷射出去,通过控制气管2内喷出气体的时速控制涂料的喷涂效率。
52.涂料管1与气管2同起点,同终点,但是并行的两根管路在机器人作业是无可避免的会发生相对位移,甚至发生摩擦。随着时间的推移,管路甚至可以因磨损而贯穿,造成不必要的麻烦。
53.在另一实施例中,第二固定件4包括第一固定部41和第二固定部42和锁紧件;锁紧件将第一固定部41和第二固定部42配合锁紧形成用于涂料管1 与气管2穿过的第一管路通孔与第二管路通孔,且第一管路通孔与第二管路通孔间隔设置;
54.第一固定件3和第二固定件4将涂料管1和气管2并行固定;涂料管1与气管2均为波纹管;第一管路通孔与第二管路通孔内均设有用于与波纹管贴合的波纹状凹槽。
55.在具体实施时,第二固定件4上设置有匹配涂料管1和气管2的波纹,以使第二固定件4将涂料管1和气管2固定的更好,同时锁紧件将第一固定件3 和第二固定件4锁紧之后形成第一管路通孔以及第二管路通孔,在本实施例中不具体限定锁紧件与第一固定件3和第二固定件4的具体安装方式,只需要锁紧件将第一固定件3和第二固定件4锁紧即可,第二固定件4可以包括卡钩与卡扣座的设计方式,卡钩可以固定在第一固定部41或者固定在第二固定部42 上;卡扣座可对应设置在第二固定部42或者第一固定部41上;具体实施时,还可以通过在第一固定部41和第二固定部42上开孔通过螺旋锁紧的方式进行固定。
56.如图2-3所示,在另一实施例中,将第二固定件4的第一固定部41以及第二固定部42设置成如下方式:第一固定部41设有第一凹槽411、第二凹槽412、第一通孔413与第二通孔414;第二固定部42设有第三凹槽421、第四凹槽422、第三通孔423与第四通孔424;第一凹槽411与第三凹槽421对应设置,形成第一管路通孔;第二凹槽412与第四凹槽422对应设置,形成第二管路通孔;第一通孔413与第三通孔423对应设置,形成第一锁紧孔;第二通孔414与第四通孔424对应设置,形成第二锁紧孔;第一锁紧孔位于远离第二管路通孔一侧,第二锁紧孔位于远离第一管路通孔一侧;
57.第一固定部41还包括第五通孔415,第二固定部42还包括第六通孔425;第五通孔415与第六通孔425对应设置,形成第三锁紧孔;第三锁紧孔设于第一锁紧孔与第二锁紧孔之间;
58.锁紧件为螺栓,第一通孔413、第二通孔414以及第五通孔415均分为两段锁紧段和容置段,锁紧段用于锁紧件锁紧,容置段用于容置螺栓头。
59.第二固定件4的四个角呈倒角设置。第二固定件4为pom乙缩醛共聚物材质。
60.应当说明的是,上述实施例均可根据需要自由组合。以上所述仅是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1