手持式仪器、方法和附加仪器与流程
1.本发明涉及一种用于将填充材料输出到接缝中的手持式仪器。手持式仪器例如实施为涡形装置挤压机和/或软管袋挤压机。该填充材料例如是接缝密封材料,尤其是硅酮或丙烯酸树脂。手持式仪器包括抓握组件,以用于手动抓握手持式仪器并且使手持式仪器沿着接缝走向进行运动。手持式仪器此外包括用于将填充材料输出到接缝中的输出机构。
技术实现要素:
2.本发明的任务在于提供一种手持式仪器,其对于用户来说使得在将填充材料输出到接缝中时得到通过所输出的填充材料所形成的填充材料体的期望的体几何形状、例如尽可能均匀的体几何形状变得简单。填充材料体具有例如细长形的,尤其绳形的体几何形状并且适宜地沿着填充材料体的长度应该具有恒定的宽度。
3.所述任务通过根据权利要求1所述的手持式仪器来解决。手持式仪器包括传感器机构,其构造成用于检测影响通过被输出到接缝中的填充材料所形成的填充材料体的体几何形状的影响参量。影响参量例如是手持式仪器速度(手持式仪器以其进行运动),或涉及接缝的接缝几何形状。手持式仪器速度还能够被称为牵引速度。手持式仪器构造成用于基于所检测到的影响参量来匹配输出率,输出机构以所述输出率输出填充材料。输出率是每一时间单位所输出的填充材料的量。
4.以这种方式,手持式仪器能够对一个或多个起干扰作用的影响参量、如例如变化的手持式仪器速度和/或变化的接缝几何形状进行补偿并且由此防止所述一个或多个影响参量以不期望的方式影响填充材料体的体几何形状。
5.若例如用户在输出填充材料时以变化的(也就是说,非恒定的)手持式仪器速度沿着接缝走向引导手持式仪器,则其在传统的手持式仪器中引起:相比于在其处手持式仪器速度较高的接缝区段,在其处手持式仪器速度较小的接缝区段处(接缝走向的每一长度单位)输出更多填充材料。得出具有不均匀的体几何形状的填充材料体。
6.根据优选的设计方案,能够借助于所描述的手持式仪器来检测手持式仪器速度并且使填充材料的输出率与所检测到的手持式仪器速度相匹配。相比于在所检测到的较低的手持式仪器速度的情况下,手持式仪器例如在所检测到的较高的手持式仪器速度的情况下以较高的输出率输出填充材料。以这种方式,能够补偿变化的手持式仪器速度对体几何形状的影响并且例如(尽管存在变化的手持式仪器速度)能够得到均匀的体几何形状。
7.若例如接缝几何形状、尤其接缝宽度沿着接缝走向发生变化,则在传统的手持式仪器中能够引起:在其处接缝宽度较小(并且因此对于接缝的填充和/或遮盖需要不太多的填充材料)的接缝区段处,对于当前的接缝宽度来说输出过多的填充材料,并且在其处接缝宽度较大(并且因此对于接缝的填充和/或遮盖需要更多的填充材料)的接缝区段处,对于当前的接缝宽度输出过少的填充材料。沿着接缝走向得出对接缝的不均匀的填充和/或遮盖。
8.根据优选的设计方案,借助于所描述的手持式仪器能够检测接缝几何形状、尤其
接缝宽度并且使填充材料的输出率与所检测到的接缝宽度相匹配。相比于在所检测到的较小的接缝宽度的情况下,例如手持式仪器在所检测到的较大的接缝宽度的情况下以较高的输出率输出填充材料。以这种方式,能够补偿变化的接缝宽度对体几何形状、尤其接缝的填充和/或遮盖的影响并且例如(尽管存在有变化的接缝宽度)能够得到对接缝的均匀的填充和/或遮盖。
9.有利的改进方案是从属权利要求的主题。
10.本发明此外涉及一种用于借助手持式仪器、尤其涡形装置挤压机和/或软管袋挤压机将填充材料输出到接缝中的方法,该方法包括如下步骤:使手持式仪器沿着接缝走向进行运动,将填充材料输出到接缝中,检测影响通过被输出到接缝中的填充材料所形成的填充材料体的体几何形状的影响参量,并且基于所检测到的影响参量匹配输出率,填充材料以所述输出率输出。
11.适宜地,该方法借助于所描述的手持式仪器来执行和/或相应于所描述的手持式仪器的改进方案进行设计。
12.本发明此外涉及一种用于能够脱开地安置到驱动仪器处的附加仪器,以用于形成用于将填充材料输出到接缝中的手持式仪器,包括:能够借助于驱动仪器驱动的、用于将填充材料输出到接缝中的输出机构和传感器机构,所述传感器机构构造成用于检测影响通过被输出到接缝中的填充材料所形成的填充材料体的体几何形状的影响参量,其中,附加仪器构造成用于基于所检测到的影响参量将控制信号提供到驱动仪器处,以便控制对输出机构的驱动并且由此匹配输出率,输出机构以所述输出率输出填充材料。
附图说明
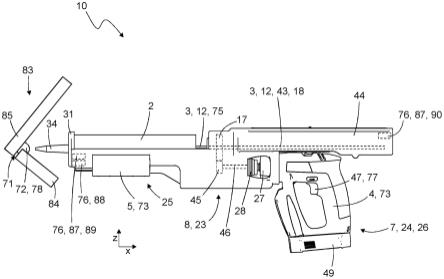
13.随后,另外的示范性的细节以及示例性的实施方式参考附图进行阐释。在此,图1示出手持式仪器和加工区域的侧视图,图2示出到沿着接缝引导的手持式仪器上的俯视图,连同示出手持式仪器速度和输出率的图表,图3示出具有第一种结构的手持式仪器的框图,图4示出具有第二种结构的手持式仪器的框图,图5示出在无被置入的填充材料容器的情况下的手持式仪器的透视的视图,图6示出具有被置入的填充材料容器的手持式仪器的透视的视图,以及图7示出填充材料容器的剖视图,挤压元件被置入到所述填充材料容器中。
具体实施方式
14.在随后的阐释中,参考与彼此正交地取向的空间方向“x方向”、“y方向”和“z方向”。x方向和y方向是水平方向并且z方向是竖直方向(在手持式仪器10的水平的使用位置中)。
15.图1示出手持式仪器10连同加工区域83。加工区域83具有接缝71。示范性地,加工区域83包括第一区域区段84和第二区域区段85,并且接缝71处于所述两个区域区段84、85之间。区域区段84、85例如是建筑材料,例如板石。例如第一区域区段84是板石、板、门框、窗框或条。第二区域区段85例如是另外的板石或壁。在区域区段84、85之间的接缝71还能够被
称为缝隙或空隙。
16.示范性地,手持式仪器10实施为涡形装置挤压机和/或软管袋挤压机。手持式仪器10还能够被称为填充材料容器挤压机。手持式仪器10用于将填充材料72输出到接缝71中。填充材料72例如是硅酮或丙烯酸树脂。适宜地,填充材料72被暂时提供在填充材料容器2、例如涡形装置或软管袋中并且借助于手持式仪器10从填充材料容器2中输出到接缝71中。
17.手持式仪器10包括抓握组件73,以用于手动抓握手持式仪器10并且使手持式仪器10沿着接缝走向74(图2中示出)进行运动。手持式仪器10能够由用户手动携带并且手动地在空间中自由运动和定位。手持式仪器10无处固定或悬挂。接缝走向74是接缝71沿接缝71的纵向方向的走向。示范性地,接缝走向74沿y方向(也就是说,垂直于图1的附图平面)进行走向。
18.手持式仪器10此外包括输出机构75,以用于将填充材料72输出到接缝71中。示范性地,输出机构75包括挤压机构3用于挤压填充材料容器2,以便促使将包含在填充材料容器2中的填充材料72输出。填充材料72通过输出元件34、例如涂敷端被输出到接缝71中。
19.手持式仪器10此外包括传感器机构76,其构造成用于检测影响填充材料体78的体几何形状的影响参量。填充材料体78通过被输出到接缝71中的填充材料72形成。填充材料体78还能够被称为焊缝。优选地,影响参量是手持式仪器速度v和/或涉及接缝几何形状。
20.手持式仪器10构造成用于基于所检测到的影响参量匹配输出率r,输出机构75以所述输出率输出填充材料72。输出率r是每一时间单位从手持式仪器10中输出的填充材料72的量。
21.例如手持式仪器10具有挤压元件12用于挤压填充材料容器2,以便促使将填充材料72从填充材料容器2中输出。手持式仪器10尤其构造成用于通过匹配挤压元件12的速度来匹配输出率r。例如手持式仪器10具有用于驱动挤压元件12的电动驱动器16(参见图3或4)并且构造成用于基于影响参量来匹配电动驱动器16的转速(例如通过匹配电动驱动器16的通电流),以便匹配输出率r。
22.适宜地,手持式仪器10构造成用于连续检测影响参量并且基于影响参量连续匹配输出率r。例如手持式仪器10连续检测当前的手持式仪器速度和/或当前的接缝几何形状并且连续地将当前的输出率r与当前的手持式仪器速度和/或当前的接缝几何形状进行匹配。
23.优选地,手持式仪器10构造成用于基于所检测到的影响参量如此匹配输出率r,使得通过被输出到接缝71中的填充材料72所形成的填充材料体78具有预设的体几何形状,尤其具有预设的宽度b,优选地具有恒定的宽度b。例如在手持式仪器10中储存有预设信息,所述预设信息预设填充材料体78的体几何形状、尤其宽度。手持式仪器10构造成用于,基于所检测到的影响参量和预设信息如此匹配输出率r,使得填充材料体78的体几何形状相应于预设信息。
24.适宜地,手持式仪器10构造成用于,基于影响参量如此匹配输出率r,使得输出机构75沿着接缝走向74在接缝走向74的每一长度单位上输出预设的、尤其恒定的填充材料量。例如在手持式仪器10中储存有如下预设信息,其预设每一长度单位的填充材料量。手持式仪器10构造成用于基于所检测到的影响参量和预设信息如此匹配输出率r,使得每一长度单位的填充材料量相应于预设信息。
25.根据优选的设计方案,影响参量包括手持式仪器速度v,手持式仪器10以所述手持
式仪器速度进行运动。手持式仪器10构造成用于检测手持式仪器速度v作为影响参量并且基于手持式仪器速度v匹配输出率r。
26.手持式仪器速度v尤其是手持式仪器10相对于接缝走向74的速度。适宜地,手持式仪器10包括输出元件34、尤其涂敷端,以用于将填充材料72输出到接缝71中。手持式仪器速度v尤其是输出元件34相对于接缝走向74的速度。
27.手持式仪器10尤其构造成用于基于所检测到的手持式仪器速度v如此匹配输出率r,使得填充材料体78尤其沿着接缝走向74具有预设的体几何形状、尤其预设的宽度b,优选地具有恒定的宽度b。
28.图2示出对输出率r的相应匹配方案。在图5中,用户借助手持式仪器10执行手持式仪器运动86,其中,手持式仪器10尤其以输出元件34沿着接缝走向74被引导。图5示出手持式仪器速度v、输出率r和填充材料体78的宽度b的时间上的走向。宽度b是填充材料体78正交于接缝走向74的纵向方向的宽度。宽度b尤其是填充材料体78的处于接缝71之上的或遮盖接缝71的那部分的宽度。
29.优选地,手持式仪器10构造成用于响应于所检测到的上升的手持式仪器速度v而提高填充材料72的输出率r。适宜地,手持式仪器10此外构造成用于响应于所检测到的下降的手持式仪器速度v而降低填充材料72的输出率r。适宜地,手持式仪器10构造成用于,与所检测到的手持式仪器速度v成比例地和/或与手持式仪器速度v成单调的、尤其严格单调的关系地提供输出率r。
30.也就是说,手持式仪器10在第一所检测到的手持式仪器速度v的情况下相比于在低于第一所检测到的手持式仪器速度v的第二所检测到的手持式仪器速度v的情况下以较高的输出率r输出填充材料。
31.适宜地,手持式仪器10构造成用于,基于手持式仪器速度v如此匹配输出率r,使得输出机构75沿着接缝走向74在接缝走向74的每一长度单位上输出预设的、尤其恒定的填充材料量。
32.根据另外的设计方案,影响参量涉及接缝几何形状。手持式仪器10构造成用于检测接缝几何形状、尤其检测接缝宽度作为影响参量,并且基于所检测到的接缝几何形状、尤其接缝宽度来匹配输出率r。接缝宽度尤其是接缝71正交于接缝走向74的方向的宽度。
33.优选地,手持式仪器10构造成用于,基于所检测到的接缝几何形状如此匹配输出率r,使得填充材料体78具有预设的体几何形状、尤其预设的宽度b、优选地具有恒定的宽度b。宽度b是填充材料体78正交于接缝走向74的纵向方向的宽度。宽度b尤其是填充材料体78的处于接缝71之上或遮盖接缝71的那部分的宽度。
34.优选地,手持式仪器10构造成用于响应于所检测到的上升的接缝宽度而提高填充材料72的输出率r。适宜地,手持式仪器10此外构造成用于响应于所检测到的下降的接缝宽度而降低填充材料72的输出率r。适宜地,手持式仪器10构造成用于与所检测到的接缝宽度成比例地和/或与接缝宽度成单调的、尤其严格单调的关系地提供输出率r。
35.也就是说,手持式仪器10在第一所检测到的接缝宽度的情况下相比于在低于该第一所检测到的接缝宽度的第二所检测到的接缝宽度的情况下以较高的输出率r输出填充材料。
36.根据特别优选的设计方案,手持式仪器10构造成用于,不仅考虑到手持式仪器速
度v而且考虑到接缝几何形状、尤其考虑到接缝宽度作为影响参量。也就是说,手持式仪器10同时基于手持式仪器速度v并且基于接缝几何形状、尤其基于接缝宽度来匹配输出率r。在输出率r与手持式仪器速度v之间的关系和输出率r与接缝几何形状之间的关系优选地如前面所描述的那样。
37.随后应该较详细地探讨传感器机构76,手持式仪器10借助所述传感器机构来检测影响参量(也就是说,尤其手持式仪器速度v和/或接缝几何形状)。
38.优选地,传感器机构76为了检测影响参量包括加速度传感器、测距单元、激光单元、图像传感器、激光雷达(lidar)单元、雷达单元和/或触摸传感器(tastsensor)。
39.优选地,传感器机构76包括第一传感器单元87,借助于其检测手持式仪器速度v。第一传感器单元87例如构造成用于检测手持式仪器10的加速度。手持式仪器10构造成用于基于所检测到的加速度计算手持式仪器速度v,尤其通过对所检测到的加速度进行积分。适宜地,第一传感器单元87包括第一传感器元件89,其例如实施为加速度传感器。适宜地,第一传感器元件89布置在手持式仪器10、尤其手持式仪器10的水平区段23的前方的端部处(也就是说,布置在如下端部处,在所述端部处存在有输出元件34)。纯示范性地,第一传感器单元87此外包括第二传感器元件90,其例如实施为加速度传感器。适宜地,第二传感器元件90布置在手持式仪器10、尤其手持式仪器10的水平区段23的后方的端部处(也就是说,布置在如下端部处,其背离输出元件34)。
40.根据备选的设计方案,第一传感器单元87、尤其第一传感器元件89实施为图像传感器。适宜地,手持式仪器10构造成用于借助第一传感器单元87拍摄多个连续的图像并且基于多个所拍摄的图像来计算手持式仪器速度v。优选地,手持式仪器10此外构造成用于基于多个所拍摄的图像来检测接缝几何形状、尤其接缝宽度,例如在应用图像处理算法的情况下进行检测。也就是说,第一传感器单元87能够适宜地不仅用于检测手持式仪器速度v而且用于检测接缝几何形状、尤其检测接缝宽度。
41.也就是说,第一传感器单元87能够为了检测手持式仪器速度尤其具有一个或两个加速度传感器(用于改善准确性)、测距单元(用于执行测距过程)、激光单元(用于激光测量)和/或图像传感器(例如用于图像评估的光学相机)。适宜地,第一传感器单元87还能够具有所提及的单元的组合。
42.可选地,传感器机构76此外具有第二传感器单元88,借助于其来检测接缝几何形状(尤其在如下情况下,其中,接缝几何形状不借助第一传感器单元87进行检测)。优选地,第二传感器单元88实施为图像传感器。适宜地,手持式仪器10构造成用于,借助第二传感器单元88拍摄多个连续的图像并且基于多个所拍摄的图像检测接缝几何形状、尤其检测接缝宽度,例如在应用图像处理算法的情况下进行检测。
43.也就是说,第二传感器单元88能够为了检测接缝几何形状尤其具有图像传感器(例如用于图像评估的光学相机)、激光单元(例如线性激光器)、激光雷达单元、雷达单元和/或触摸传感器(用于以传感器方式的测厚规)。适宜地,第二传感器单元88还能够具有所提及的单元的组合。
44.随后,应该参考图3对手持式仪器10的优选的第一种结构10a进行探讨。
45.根据第一种结构10a,手持式仪器10包括驱动仪器7和安置到驱动仪器7处的附加仪器8。附加仪器8能够取下地安置到驱动仪器7处。
46.附加仪器8包括输出机构75并且驱动仪器7用于驱动输出机构75。因此,驱动仪器7包括电动驱动器16,所述电动驱动器通过机械接口与输出机构75耦联。电动驱动器16尤其包括具有变速档位的电动马达。
47.驱动仪器7此外包括通讯机构79,以用于与附加仪器8的附加仪器通讯机构96进行通讯、尤其进行数据传递。适宜地,附加仪器8通过附加仪器通讯机构96将通讯信号传递到通讯机构79处,所述通讯信号描绘影响参量和/或包括控制信号。所述通讯能够以有接触的方式来进行,也就是说,例如通过插接触点或滑动触点来进行,或以无线的方式来进行,例如通过蓝牙或wlan来进行。
48.可选地,驱动仪器7此外包括能量接口91,其与附加仪器能量接口92耦联,优选地以无线的方式或以有线的方式进行耦联。适宜地,通过能量接口91和附加仪器能量接口92,在驱动仪器7与附加仪器8之间进行能量传递。优选地,该能量传递是感应式的能量传递。
49.驱动仪器7此外包括操作机构77。适宜地,用户能够通过操作机构77开始和/或停止填充材料72的输出。适宜地,此外能够通过操作机构77输入预设信息。
50.驱动仪器7此外包括能量存储器49,例如蓄电池和/或电池,其用于对手持式仪器10、尤其电动驱动器16进行能量供给。
51.驱动仪器7此外包括控制单元48,其例如包括至少一个微控制器。控制单元48与操作机构77、能量接口91、电动驱动器16、通讯机构79和/或能量存储器49通讯连接。控制单元48例如构造成用于基于附加仪器8的通讯信号操控电动驱动器16,以便根据影响参量来匹配输出率r。
52.可选地,附加仪器8包括附加仪器能量存储器93、尤其蓄电池和/或电池,以用于对附加仪器8进行(尤其附加的)能量供给。
53.附加仪器8此外包括附加仪器操作机构95,用户能够例如通过所述附加仪器操作机构输入预设信息。
54.附加仪器8此外包括用于检测影响参量的传感器机构76。
55.附加仪器8此外包括显示单元81,以用于显示涉及填充材料72的输出的状态信息和/或预设信息。状态信息例如显示,在填充材料容器2中存在有多少填充材料72和/或已经输出了多少填充材料72。显示单元81尤其包括刻度和/或图形显示器。状态信息能够包括一个或多个运行参数,例如涡形装置液面高度、消耗量和/或被涂敷的和/或剩余的延米(laufmeter)。
56.附加仪器8此外包括附加仪器控制单元94,其例如包括至少一个微控制器。附加仪器控制单元94与附加仪器能量接口92、附加仪器能量存储器93、附加仪器操作机构95、传感器机构76、显示单元81、附加仪器通讯机构96和/或输出机构75通讯连接。附加仪器控制单元94尤其构造成用于基于所检测到的影响参量计算通讯信号、尤其计算控制信号并且将其输出到附加仪器通讯机构96处以传递到驱动仪器7处。
57.适宜地,还能够单独(也就是说,在没有驱动仪器7的情况下)提供附加仪器8。附加仪器8用于能够脱开地安置到驱动仪器7处,以用于形成用于将填充材料72输出到接缝71中的手持式仪器10。附加仪器8包括能够借助于驱动仪器7驱动的输出机构75,以用于将填充材料72输出到接缝71中,并且包括传感器机构76,其构造成用于检测影响通过被输出到接缝(71)中的填充材料72所形成的填充材料体78的体几何形状的影响参量。附加仪器8构造
成用于基于所检测到的影响参量将控制信号提供到驱动仪器7处,以便控制对输出机构75的驱动并且由此匹配输出率r,输出机构75以所述输出率输出填充材料。
58.适宜地,通讯机构79和/或附加仪器通讯机构96构造成用于与外部仪器97和/或云端服务器98进行通讯,例如以用于接收预设信息。优选地,所述通讯以有线的方式或以无线的方式来进行,尤其通过蓝牙或wlan来进行。外部仪器97例如是物联网仪器、移动电话、电脑或平板电脑。
59.图4示出手持式仪器10的第二种可行的结构10b。根据第二种结构10b,手持式仪器10实施为集成的仪器。根据第二种结构10b的手持式仪器10尤其不包括能够取下的附加仪器。根据第二种结构10b,手持式仪器10包括输出机构75、电动驱动器16、控制单元48、显示单元81、操作机构77、传感器机构76、通讯机构79和/或能量存储器49。适宜地,结构10b的所提及的单元如前面(或随后)所阐释的那样进行构造。适宜地,结构10b的所提及的单元布置在共同的壳体中。例如根据第二种结构10b,电动驱动器16、输出机构75和/或传感器机构76布置在共同的壳体中。适宜地,结构10b的所提及的单元以有线的方式彼此连接。适宜地,控制单元48以有线的方式与传感器机构76连接并且优选地构造成用于基于借助传感器机构76所检测到的影响参量来操控电动驱动器16,以便匹配输出率r。
60.在下面,应该较详细地探讨预设信息。预设信息预设例如填充材料体的通过匹配输出率r应该实现的期望的体几何形状、尤其期望的宽度。此外,预设信息能够预设每一长度单位上通过匹配输出率r应该实现的期望的填充材料量。预设信息此外能够预设,作为影响参量应该仅仅考虑手持式仪器速度v、仅仅考虑接缝几何形状还是应该不仅考虑手持式仪器速度v而且应该考虑接缝几何形状。适宜地,预设信息能够通过操作机构77或附加仪器操作机构95被输入到手持式仪器10中。此外,通过通讯机构79或附加仪器通讯机构96能够从手持式仪器10接收预设信息,例如从外部仪器97和/或云端服务器98接收预设信息。手持式仪器10构造成用于在匹配输出率r时考虑到预设信息。
61.根据优选的设计方案,手持式仪器10构造成用于将填充材料的消耗记录为填充材料消耗信息。优选地,手持式仪器10构造成用于与填充材料容器2的标志相配属地存储填充材料消耗信息。适宜地,(依次和/或交替地)多个不同的填充材料容器2与手持式仪器10一起使用,其中,每个填充材料容器2具有不同的标志。适宜地,手持式仪器10针对每个填充材料容器2与相应的标志相配属地记录各自的填充材料消耗信息。适宜地,手持式仪器10构造成用于与涉及位置的位置信息相配属地存储填充材料消耗信息,在所述位置处进行消耗。手持式仪器10构造成用于将填充材料消耗信息显示在显示单元81上(例如与标志和/或位置信息一起进行显示)和/或构造成用于将填充材料消耗信息传递到外部仪器97和/或云端服务器98处(例如与标志和/或位置信息一起进行传递)。基于填充材料消耗信息能够例如算出所消耗的填充材料。
62.根据另外的优选的设计方案,手持式仪器10构造成用于提供裁剪开口信息,其中,裁剪开口信息给用户呈现针对手持式仪器10的涂敷端的待由用户实施的裁剪的推荐。裁剪开口信息例如通过显示单元81进行显示。适宜地,手持式仪器10构造成用于基于预设信息产生裁剪开口信息和/或在考虑裁剪开口信息的情况下匹配输出率r。
63.手持式仪器10尤其实施为智能涡形装置挤压机,其独立于牵引速度(也就是说,手持式仪器速度v)并且可选地独立于缝隙几何形状(也就是说,接缝几何形状)始终产生恒定
的事先界定的体几何形状。适宜地,通过传感器机构76的一个或多个传感器直接测量或计算涂敷端相对于底座、例如相对于加工区域83的相对手持式仪器速度v并且由此连续计算和调整对于恒定的线密度(liniendichte)或保持相同的体几何形状来说必要的输出率r。
64.用户在开始工作之前手动调整期望的标准接缝尺寸,例如通过预设信息来调整,并且相应地裁剪涂敷端。如有可能,能够借助辅助工具经界定地对涂敷端进行裁剪。附加地,通过显示单元81能够将用于最佳的材料散布的裁剪开口作为推荐提示输出。用户将涂敷端定位在缝隙几何形状(也就是说,接缝71)处,启动手持式仪器10、尤其启动电动驱动器16并且以任意的牵引速度(也就是说,手持式仪器速度v)沿着接缝走向74牵引手持式仪器10。在此,手持式仪器10通过对输出率r进行匹配始终涂敷正确的填充材料量。为了结束填充材料体的供应,由用户来停止手持式仪器10。接着,用户对填充材料体进行成型和弄平。
65.随后,应该探讨手持式仪器10的另外的示范性的特征:手持式仪器10包括用于填充材料容器2的容纳部1(参见图5)。示范性地,填充材料容器2实施为涡形装置。备选地,填充材料容器能够实施为软管袋。
66.在图1和6中,示出具有被置入到容纳部1中的填充材料容器2的手持式仪器10。在此,手持式仪器10包括填充材料容器2。手持式仪器10还能够在没有被置入的填充材料容器2的情况下被提供(参见图5)。
67.手持式仪器10的基础外形包括水平区段23和竖直区段24。水平区段23细长形地进行实施并且以其纵向轴线平行于x方向进行取向。竖直区段24在下方置放到水平区段23处并且从水平区段23出发向下方、尤其竖直向下方延伸。示范性地,手持式仪器10的基础外形由水平区段23和竖直区段24构成。手持式仪器10示范性地具有t形的基础外形。
68.水平区段23包括容纳部1、输出机构75和/或可选地包括抓握组件73的稳定手柄5。竖直区段24包括抓握组件73的携带手柄4。
69.示范性地,手持式仪器10包括杆区段25。示范性地,杆区段25细长形地进行实施并且以其纵向轴线平行于x方向进行取向。杆区段25是水平区段23的一部分;适宜地,杆区段25是水平区段23的前方的纵向区段。杆区段25包括容纳部1,其尤其布置在杆区段25的上侧处。适宜地,在杆区段25处,尤其在杆区段25的下侧处布置有稳定手柄5。
70.示范性地,手持式仪器10包括驱动区段26。示范性地,驱动区段26通过竖直区段24来提供。驱动区段26尤其构造成用于给输出机构75提供驱动。驱动区段26包括电动驱动器16、尤其电动马达,以用于驱动输出机构75。
71.示范性地,手持式仪器10包括用于旋拧/或钻孔仪器的驱动仪器7。适宜地,驱动仪器7是驱动区段26。驱动仪器7能够尤其应用为旋拧和/或钻孔电动工具,例如应用为蓄电池式旋拧器。适宜地,驱动仪器7能够从手持式仪器10取下,并且(尤其在安置好工具、例如钻孔器或螺丝刀刃之后)能够用于旋拧和/或钻孔。携带手柄4属于驱动仪器7。
72.手持式仪器10包括附加仪器8。适宜地,附加仪器8包括杆区段25。示范性地,附加仪器8是水平区段23。附加仪器8安置、尤其能够取下地安置在驱动区段26处、尤其在驱动仪器7处。稳定手柄5属于附加仪器8。适宜地,附加仪器8实施为涡形装置挤压机附加仪器。附加仪器8此外能够实施为软管袋挤压机附加仪器。
73.驱动区段26、尤其驱动仪器7包括驱动接口27用于提供驱动转动运动,所述驱动转动运动尤其借助于电动驱动器16来产生。附加仪器8包括从动接口28用于接受在驱动接口
27处提供的驱动转动运动。附加仪器8借助从动接口28联接在驱动区段26的驱动接口27处。
74.优选地,附加仪器8能够绕平行于手持式仪器10的纵向方向取向的转动轴线相对于驱动仪器7进行转动。示范性地,手持式仪器10包括转动支承件,附加仪器8通过所述转动支承件绕转动轴线9能够转动地支承在驱动仪器7处。适宜地,附加仪器8借助于转动支承件能够在至少100度、尤其至少140度的角度范围中相对于驱动仪器7进行转动。
75.容纳部1构造成用于容纳填充材料容器2。容纳部1的容纳部底部29尤其与填充材料容器2的形状相对应地成型。示范性地,填充材料容器2具有柱状的、尤其圆柱状的形状。容纳部底部29界定柱状部段形的容纳凹处,其相应于填充材料容器2的柱状的形状并且柱状的填充材料容器2能够置入到所述容纳凹处中。容纳部1尤其是槽形的。示范性地,容纳部1实施为轴瓦,尤其实施为向上方敞开的轴瓦。容纳部1还能够被称为敞开的容纳部1。
76.图7示出填充材料容器2的示范性的设计方案。填充材料容器2包括容器体32,其尤其柱状地、优选圆柱状地成型。示范性地,容器体32空心柱状地进行实施。容器体32的纵向轴线平行于x方向进行取向。容器体32具有前方的端侧38和后方的端侧39,其适宜地分别垂直于x方向进行取向。适宜地,后方的端侧39沿x方向敞开地进行设计,从而通过后方的端侧39能够接近容纳空间37(用于容纳挤压元件12)。容纳空间37沿径向方向由容器体32的后方的空心柱状的体区段41进行限制。此外,容纳空间37沿负x方向由尤其盘形的按压区段36进行限制。沿正x方向,容纳空间37是敞开的。容纳空间37尤其是柱状的。
77.填充材料容器2优选地实施为涡形装置,尤其实施为接缝密封材料涡形装置,例如硅酮涡形装置或丙烯酸树脂涡形装置。填充材料容器2包括布置在容器体32中的填充材料空间35,在其中存在有待输出的填充材料72。填充材料72尤其是接缝密封材料,例如是硅酮或丙烯酸树脂。
78.填充材料容器2包括输出元件34,其尤其实施为涂敷端并且适宜地以其纵向轴线平行于x方向进行取向。输出元件34布置在前方的端侧38处。填充材料容器2此外包括按压区段36,所述按压区段当其被按压时使填充材料空间35变小,从而将填充材料72通过输出元件34从填充材料容器2中输出。按压区段36布置在后方的端侧39处和/或能够通过后方的端侧39接近。
79.按压区段36尤其能够沿(负)x方向进行运动,以便促使将填充材料输出。负x方向还应该被称为前进方向并且正x方向被称为后退方向。示范性地,按压区段36是盘形的。按压区段36被置入到空心柱状的容器体32中并且能够沿x方向相对于空心柱状的容器体32进行运动,以便使填充材料空间35变小。按压区段36还能够被称为活塞元件或底部,尤其被称为涡形装置底部。在按压区段36的背离填充材料空间35的侧上存在有容纳空间37,以用于容纳挤压机构3的挤压元件12。
80.适宜地,输出机构75包括填充材料容器2。输出机构75此外包括挤压机构3用于挤压填充材料容器2,以便促使将包含在填充材料容器2中的填充材料72输出。适宜地,挤压机构3此外用于将填充材料容器2锁止在容纳部1中,从而不能够将填充材料容器2从容纳部1中取出。
81.挤压机构3包括挤压元件12,借助所述挤压元件能够(沿负x方向)对按压区段36进行按压,以便促使将填充材料72从填充材料空间35中输出。此外,挤压元件12用于沿(正)x方向和/或径向方向(尤其z方向和/或y方向)支撑(被置入到容纳部1中的并且被置放到前
方的止挡结构31处的)填充材料容器2并且将填充材料容器2如此锁止在容纳部1中;也就是说,尤其如下地固定在容纳部1中,使得不能够将填充材料容器2从容纳部1中取出。
82.示范性地,挤压元件12包括挤压头部42,其能够被置入到容纳空间37中和/或能够直接置放到按压区段36处。示范性地,挤压头部42实施为挤压凸模并且尤其具有盘形的端部区段。沿(正)x方向,棒区段43联接到挤压头部42处。棒区段43尤其实施为主轴18并且适宜地具有螺纹、尤其外螺纹。棒区段43以其纵向轴线平行于x方向进行取向。
83.手持式仪器10的水平区段23还能够被称为挤压区段。水平区段23包括前面已经阐释的杆区段25。水平区段23此外包括沿(正)x方向联接到杆区段处的后方的纵向区段44。示范性地,后方的纵向区段44沿(正)x方向延伸到驱动区段26之后、尤其延伸到携带手柄4之后。后方的纵向区段44尤其用于容纳挤压元件12的棒区段43。
84.挤压机构3此外包括驱动装置用于驱动挤压元件12。驱动装置用于沿前进方向驱动挤压元件12,以便由此促使将填充材料72从填充材料容器2中输出。驱动装置尤其构造成用于将由驱动区段26、尤其由电动驱动器16所提供的驱动转动运动转换成挤压元件12的线性运动。线性运动尤其是前进运动,适宜地沿(负)x方向的前进运动。
85.驱动装置包括驱动元件17,其与挤压元件12耦联并且用于驱动挤压元件12。驱动元件17基于(由驱动区段26所提供的)驱动转动运动能够被置于从动转动运动中并且构造成用于基于从动转动运动将挤压元件12置于线性运动中。示范性地,驱动元件17在其外周缘处具有齿。此外,驱动元件17具有中心穿孔,在其处存在有内螺纹。驱动元件17还能够被称为主轴螺母、齿轮或被称为主轴螺母齿轮。通过中心穿孔走向有挤压元件12的主轴18。主轴18以其外螺纹与驱动元件17的内螺纹处于接合中,从而主轴18在驱动元件17转动运动时被置于线性运动中。
86.驱动装置此外包括耦联齿轮45,通过其将驱动元件17与驱动区段26耦联。耦联齿轮45与驱动元件17的齿处于接合中。示范性地,耦联齿轮45具有比驱动元件17较小的直径。示范性地,耦联齿轮45沿z方向布置在驱动元件17之下。耦联齿轮45抗转动地耦联到从动接口28的从动轴46处。示范性地,耦联齿轮45与从动轴46同轴地进行布置。从动轴46平行于x方向进行取向。从动轴46与驱动区段26耦联,尤其通过从动接口28与驱动接口27耦联并且通过由驱动区段26所提供的驱动转动运动被置于从动转动运动中。从动转动运动通过耦联齿轮45被传递到驱动元件17处。
87.手持式仪器10包括操作机构77。操作机构77包括操作元件47,通过所述操作元件能够控制对挤压元件12的驱动,并且由此控制填充材料72从填充材料容器2中的输出。尤其能够借助操作元件47开始和/或停止填充材料72的输出。操作元件47尤其实施为按键,适宜地实施为扳机按键或手枪扳机。操作元件47布置在携带手柄4处,尤其布置在携带手柄4的前方的端部处。操作元件47能够借助用户的第一只手进行操纵,也即在如下状态中,其中,用户用第一只手抓握携带手柄4。操作元件47与控制单元48通讯耦联,通过所述控制单元来操控电动驱动器16。
88.手持式仪器10包括携带手柄4。借助携带手柄4,能够借助用户的第一只手来携带和引导手持式仪器10,以便将手持式仪器10在输出填充材料72时定位在期望的位置处。
89.示范性地,携带手柄4是竖直区段24、尤其驱动区段26的一部分。示范性地,携带手柄4实施为手枪把手。携带手柄4的纵向轴线竖直地进行取向,尤其沿z方向或沿x-z方向进
行取向。携带手柄4能够围绕其纵向轴线被抓握。携带手柄4布置在手持式仪器10的后方的区域中。携带手柄4优选地至少8cm长(沿其纵向轴线的方向)。
90.手持式仪器10此外包括稳定手柄5。借助稳定手柄5,手持式仪器10能够借助用户的第二只手进行抓握并且在输出填充材料72时、尤其在用户以其第一只手抓握携带手柄4时被稳定。示范性地,稳定手柄5相比于携带手柄4较远地布置在前方(也就是说,较远地沿负x方向)。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1