一种夹持定位装置及喷胶机械手的制作方法
1.本发明涉及喷涂设备领域,尤其是涉及一种夹持定位装置及喷胶机械手。
背景技术:
2.在进行扶手、嵌饰板等汽车内饰的生产过程中,需要将皮革等包覆在配件表面,包覆前需要对配件表面进行喷胶,喷胶的效果直接影响成品的成型度。
3.现有产品喷胶通常使用手工持胶枪或喷头管进行喷涂,手工喷胶对操作人员要求高,操作复杂,也有一些用于喷胶的设备,但是由于喷胶需要的精确度较高,设备通常灵活度不够,影响喷涂效果。
4.针对上述中的相关技术,发明人认为现有设备的喷胶灵活度不如手工,在喷涂时,由于汽车配件的边缘一般向下弯折,造成边缘的喷涂效果不均匀。
技术实现要素:
5.为了使工件整体和边缘喷胶均匀,本技术提供一种夹持定位装置及喷胶机械手。
6.第一方面,本技术提供的一种夹持定位装置采用如下的技术方案:一种夹持定位装置,包括水平工作台,所述水平工作台上铰接有翻转电机,所述翻转电机在竖直面内转动,所述翻转电机的输出轴可拆卸连接有固定块,所述水平工作台靠近固定块下方固设有升降气缸,所述升降气缸的活塞杆抵接固定块。
7.通过采用上述技术方案,使用时,在工作台上设置翻转电机带动固定块和固定块上的工件翻转,使工件两侧边缘能够向上翻转一定角度,使边缘露出,便于对边缘进行喷胶,模拟人手操作喷胶均匀细致,减少机器喷涂边缘喷涂较薄的问题,提高喷涂均匀性。升降气缸可以对固定块进行支撑,减少晃动,提高喷涂的均匀性和精度。
8.可选的,所述升降气缸有两个,两个所述升降气缸分别位于固定块下方两端,所述固定块靠近翻转电机的一端固定连接有安装块,所述安装块上开设有安装槽,所述翻转电机的电机轴插入安装槽内,所述安装块和电机轴共同穿设并转动连接有螺栓杆,所述螺栓杆上螺纹连接有螺母。
9.通过采用上述技术方案,两个升降气缸一方面可以从两端进行支撑,提高支撑的稳定性,从而提高喷涂精度,另一方面通过调整两个升降气缸的高度可以将使工件两端分别向上翻起一定角度,对两端边缘进行喷涂,解决机器喷涂边缘喷涂薄的问题,提高喷涂效果。
10.可选的,所述固定块上开设有用于插接工件的插孔,所述固定块内靠近插孔位置设有用于固定插入插孔工件的夹持组件。
11.通过采用上述技术方案,将工件的部分组件插入到插孔中,插孔内的夹持组件能够对工件进行夹持,减少翻转过程中工件的晃动移位,提高喷涂的精度。
12.可选的,所述夹持组件包括覆盖插孔侧壁设置的气囊,所述气囊形状贴合插孔侧壁设置,所述气囊连通有同一根充气管,所述气囊表面为硅胶等表面高摩擦力材质。
13.通过采用上述技术方案,气囊未充气时,将工件插入,然后对气囊进行充气,气囊表面为硅胶等高摩擦力材质,操作便捷,夹持面广,夹持稳定性高,能够提高喷涂的精度。
14.可选的,所述固定块靠近插孔的位置开设有夹持槽,所述夹持组件包括转动连接于夹持槽靠近插孔位置的弹块,所述弹块与夹持槽的槽壁之间共同设有扭簧,当所述扭簧处于自然状态时,所述弹块部分伸入插孔内。
15.通过采用上述技术方案,将工件插入插孔时,弹块被挤压进入夹持槽内,工件插入后,弹块在扭簧的作用下抵紧工件,实现稳固的效果,提高喷涂精度。
16.第二方面,本技术提供一种喷胶机械手。
17.一种喷胶机械手,包括上述一种夹持定位装置,还包括底座,所述底座上转动连接有第一支臂,所述第一支臂在竖直面内转动,所述第一支臂上转动连接有第二支臂,所述第二支臂与第一支臂在相同平面内转动,所述第二支臂可伸缩,所述第二支臂上转动连接有第三支臂,所述第三支臂在第二支臂所在的竖直面内转动,所述第三支臂上设有喷头,所述喷头位于固定块上方。
18.通过采用上述技术方案,使用时,通过设置多级支臂转动,转动过程能够更加便捷灵活,同时第二支臂可伸缩,进一步提高了机械手的活动范围,使机械手更加灵活,便于对固定块上的工件进行喷涂。
19.可选的,所述喷头上连接有喷胶管,所述喷胶管为软管,所述第二支臂和第三支臂上设有伸缩筒,所述伸缩筒为波纹管材质,所述喷胶管从伸缩筒穿过与喷头连通。
20.通过采用上述技术方案,伸缩筒的设置可以便于喷胶管穿过,减少机械手活动过程中喷胶管被挂住等造成的损伤,能够显著提高喷胶的灵活性和效果。波纹管材质的伸缩筒活动便捷,可以向各个方向进行灵活伸缩和转动,更贴合机械手各个支臂的伸缩和移动。
21.可选的,所述第二支臂包括与第一支臂转动连接的转动部,所述转动部与所述第一支臂的转动方向相同,所述转动部转动连接有水平部,所述水平部在竖直面内转动,所述水平部转动时所在平面与第一支臂的转动时所在平面垂直。
22.通过采用上述技术方案,第二支臂整体通过转动块和第一支臂进行转动,同时第二支臂的水平部的转动所在平面与转动块的转动所在平面垂直,可以实现第二支臂远离第一支臂的端部在竖直面内多个方向的移动,进一步提高机械手的灵活度。
23.可选的,所述水平部包括水平设置的伸缩气缸,所述伸缩气缸的缸座与所述转动部转动连接,所述伸缩气缸的活塞杆固定连接有铰接块,所述铰接块与所述第三支臂铰接。
24.通过采用上述技术方案,水平部设有伸缩气缸可以实现水平部的伸缩,以提高机械手活动的范围,伸缩气缸的设置便于通过编程进行控制,从而提高精度。
25.可选的,所述第一支臂远离底座的一端固定连接有第二步进电机,所述第二步进电机的输出轴与所述转动部固定连接。
26.通过采用上述技术方案,第二步进电机能够驱动转动部转动,进而带动第二支臂进行转动,实现精确的角度调节效果。
27.综上所述,本技术包括以下有益技术效果:1. 使用时,在工作台上设置翻转电机带动固定块和固定块上的工件翻转,使工件两侧边缘能够向上翻转一定角度,使边缘露出,便于对边缘进行喷胶,模拟人手操作喷胶均匀细致,减少机器喷涂边缘喷涂较薄的问题,提高喷涂均匀性。升降气缸可以对固定块进行
支撑,减少晃动,提高喷涂的均匀性和精度;2. 升降气缸一方面可以从两端进行支撑,提高支撑的稳定性,从而提高喷涂精度,另一方面通过调整两个升降气缸的高度可以将对使工件两端分别向上翻起,对两端边缘进行喷涂,减少机器喷涂边缘喷涂薄的问题,提高喷涂效果;3. 将工件的部分组件插入到插孔中,插孔内的夹持组件能够对工件进行夹持,减少翻转过程中工件的晃动移位,提高喷涂的精度。
附图说明
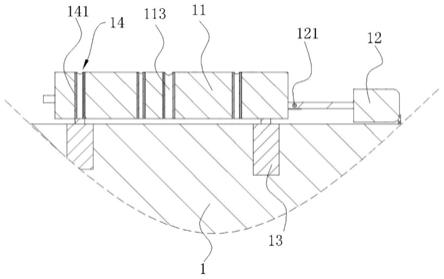
28.图1是本技术一种夹持定位装置实施例1的结构示意图。
29.图2是图1中a部分的放大图。
30.图3是本技术一种夹持定位装置实施例1突出升降气缸的局部剖面图。
31.图4是本技术一种夹持定位装置实施例2突出夹持组件的局部剖面图。
32.图5是图4中b部分的放大图。
33.图6是本技术一种喷胶机械手的结构示意图。
34.图7是本技术一种喷胶机械手喷头的局部剖面图。
35.附图标记说明:1、水平工作台;11、固定块;111、安装块;113、插孔;12、翻转电机;121、螺栓杆;122、螺母;13、升降气缸;14、夹持组件;141、气囊;142、夹持槽;143、弹块;144、扭簧;2、底座;21、第一支臂;211、第一步进电机;22、第二支臂;221、第二步进电机;222、转动部;223、水平部;2231、伸缩气缸;2232、铰接块;224、第四步进电机;23、第三支臂;231、第三步进电机;232、喷头;24、喷胶管;241、连接块;242、连接孔;25、伸缩筒。
具体实施方式
36.以下结合附图1-7对本技术作进一步详细说明。
37.本技术实施例公开一种夹持定位装置。
38.实施例1参照图1和图2,夹持定位装置包括水平工作台1。水平工作台1上铰接有翻转电机12,翻转电机12在竖直面内转动,翻转电机12的输出轴可拆卸连接并转动连接有固定块11。使用时,通过翻转电机12驱动固定块11在竖直面内翻转,可以使工件两侧向上翻转,便于对工件两侧边缘喷涂,模拟人手操作,提高工件边缘喷涂均匀性。
39.参照图2和图3,水平工作台1靠近固定块11下方固设有两个升降气缸13,升降气缸13的活塞杆抵接固定块11,两个升降气缸13分别位于固定块11下方两端。固定块11靠近翻转电机12的一端固定连接有安装块111,安装块111上开设有安装槽,翻转电机12的电机轴插入安装槽内,安装块111和电机轴共同穿设并转动连接有螺栓杆121,螺栓杆121上螺纹连接有螺母122。当固定块11位置固定后,可以上升升降气缸13的活塞杆使其抵接到固定块11上,从而实现支撑作用,提高稳定性,提高喷涂精度,也可以通过调整升降气缸13高度配合铰接关系可以使固定块11两端向上翻转,对工件两端边缘喷涂,模拟人手操作,操作便捷,喷涂精度高。
40.参照图3,固定块11上开设有插孔113。插孔113与工件下方的卡块相适配。固定块
11内靠近插孔113位置设有用于固定插入插孔113工件的夹持组件14。在固定工件时,通过插孔113能够将工件卡接在固定块11上,然后通过夹持组件14对工件进行固定。
41.参照图3,夹持组件14包括覆盖插孔113侧壁设置的气囊141,气囊141形状贴合插孔113侧壁设置,气囊141均连通有同一根充气管,气囊141表面为硅胶等表面高摩擦力材质。通过气囊141充气对插孔113内的工件部分进行挤压固定,接触面积广,对工件的稳固性好,在进行翻转时,减少晃动,能够提高喷涂精度。
42.本技术一种夹持定位装置实施例1的实施原理为:使用时,将工件上的卡块对准插孔113插入,对气囊141进行充气固定工件位置,对工件进行夹持固定,由于气囊141贴合插孔113,可以将工件上的卡块完全固定,实现良好的稳定性。喷涂过程中,通过翻转电机12实现两侧边朝上的翻转,通过升降气缸13实现工件两端朝上的翻转,便于对工件边缘进行喷涂,喷涂效果好,气囊141在翻转过程中可以提高稳定性,提高喷涂精度。
43.实施例2参照图4和图5,本实施例与实施例1的区别在于,夹持组件14的结构不同。固定块11靠近插孔113的位置开设有夹持槽142,夹持组件14包括转动连接于夹持槽142靠近插孔113位置的弹块143,弹块143与夹持槽142的槽壁之间共同固设有扭簧144,当扭簧144处于自然状态时,弹块143部分伸入插孔113内。将工件插入插孔113时,弹块143被挤压进入夹持槽142内,工件插入后,弹块143在扭簧144的作用下抵紧工件,实现稳固的效果,提高喷涂精度。
44.本技术实施例还公开一种喷胶机械手。
45.参照图6,喷胶机械手包括上述夹持定位装置。还包括设置在水平工作台1一侧设有底座2,底座2上转动连接有第一支臂21,第一支臂21在竖直面内转动。第一支臂21远离底座2的一端转动连接有第二支臂22,第二支臂22与第一支臂21的转动方向相同,第二支臂22可伸缩,第二支臂22远离第一支臂21的一端转动连接有第三支臂23,第三支臂23在第二支臂22所在的竖直面内转动,第三支臂23上固设有喷头232,喷头232位于水平工作台1上方。使用时,将需要喷胶的嵌饰板等组件放置在水平工作台1的固定块11上,通过程序控制机械手的各个支臂进行伸缩转动,控制喷头232的位置对组件进行精确喷涂,可以实现自动化的喷涂效果。
46.参照图6,底座2上固设有第一步进电机211,第一步进电机211的输出轴与第一支臂21固定连接。第一支臂21靠近第二支臂22一端固定连接有第二步进电机221,第二步进电机221的输出轴与第二支臂22固定连接。第二支臂22靠近第三支臂23的位置固定连接有第三步进电机231,第三步进电机231的输出轴与第三支臂23固定连接。第一步进电机211可以驱动第一支臂21转动,第二步进电机221可以驱动第二支臂22转动,第三步进电机231可以驱动第三支臂23转动。
47.参照图6,第二支臂22包括与第一支臂21转动连接的转动部222,转动部222与第一支臂21的转动方向相同,第二步进电机221的输出轴与转动部222固定连接。转动部222一端转动连接有水平部223,水平部223在竖直面内转动,水平部223的转动所在平面与第一支臂21转动所在平面垂直,转动部222固定连接有第四步进电机224的机座,第四步进电机224的输出轴与水平部223固定连接。第四步进电机224则能够驱动水平部223的转动,实现竖直面内另一个方向上的转动,增加机械手前端喷胶的灵活性。
48.参照图6,水平部223包括水平设置的伸缩气缸2231,伸缩气缸2231的缸座与转动部222转动连接,伸缩气缸2231的活塞杆固定连接有铰接块2232,铰接块2232与第三支臂23铰接,第三步进电机231固定在铰接块2232上。通过伸缩气缸2231实现第二支臂22长短伸缩的功能,提高机械手活动范围,实现零活喷胶。
49.参照图6,第二支臂22和第三支臂23上设有伸缩筒25,伸缩筒25为波纹管材质。喷头232上固定连接并连通有喷胶管24,喷胶管24为软管,喷胶管24从伸缩筒25内穿过。软管设置的喷胶管24可以随机械手的运动进行运动,实现良好的喷胶效果。波纹管材质活动更灵活,当机械手进行运动时,波纹管能够很好的适应机械手的活动,有效减少运动过程中喷胶管24缠绕。
50.参照图6和图7,喷头232内部中空,喷胶管24为至少两个,喷胶管24与喷头232连通的位置均固定连接有连接块241,连接块241上开设有连接孔242,连接孔242连通喷胶管24和喷头232,连接孔242的直径小于喷胶管24内径。所有连接孔242远离喷胶管24的一端互相靠近。喷头232内部中空,通过互相正对的喷胶管24,胶水能够从连接孔242内喷出,用于冲击力互相混合均匀,实现良好的混合效果。
51.一种喷胶机械手的实施原理:使用时,根据需要喷涂的工件选择合适的固定块11,将固定块与翻转电机12装配,通过固定块11将工件限位在水平工作台1上,通过编程控制机械手各个部分的转动,由于机械手分为第一支臂21、第二支臂22和第三支臂23,其中第二支臂22可以伸缩,第二支臂22能够在另一个竖直面内转动,实现竖直面内的灵活运动,同时通过翻转电机12和升降气缸13进行翻转,使工件转动,便于边缘喷涂均匀,伸缩筒25的存在能够减少绕线,喷头232不同的喷胶管24可以通过阀门控制流量,实现胶水精确均匀调配。
52.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1