一种用于机器人-动物混合群体行为研究的实验台
1.本发明涉及混合群体智能领域,尤其涉及一种用于机器人-动物混合群体行为研究的实验台。
背景技术:
2.群体智能是机器人领域和人工智能领域的交叉学科,关注如何给机器人个体设计简单的行为规则,使得机器人群体整体涌现出有规律的行为,从而表现出智能的特征,执行某些任务。
3.目前群体智能领域的研究主要聚焦在由机器人组成的群体,群体中所有个体都是人为可控的。而以由机器人群体和动物群体组成的混合群体为研究对象,对这类混合群体的群体智能行为开展研究,目前还是一个很新的领域,相关研究非常有限。
4.由机器人-动物组成的混合群体,其中的机器人的行为规则是人为设定的。但是动物个体的行为规则来自于动物的本能,不由人控制,很多动物的行为机理人类所知甚少,因此也难以对动物的行为规则进行建模,处于一种黑箱的状态。因此基于理论分析和建模的研究方法很难展开。
5.例如,一种在中国专利文献上公开的“一种混合群体智能的深度学习模型超参数优化方法”,其公告号cn113128653a,包括:选取深度神经网络搭建软件缺陷预测模型;初始化混合狼群算法参数;更新个体极值和群体极值;判断是否满足算法停止条件;更新每个粒子的速度和位置;求出更新后的位置上的适应值;求出更新后的头狼的最优适应值和最优的位置;更新探狼位置后更新头狼;更新猛狼位置;更新当前位置上的猛狼的适应值;计算进入围攻狼的更新位置;舍弃最差的r匹狼;计算r匹狼的适应值;得到模型的评价指标。然而该类的深度学习需要大量的实验数据。
6.另外一种研究思路是,设计实验场,将机器人和动物放在同一实验场中,使用实验的方法进行研究。例如早期的研究中,将机器狗和鹅群置于同一环形实验场中,模拟牧羊犬驱赶鹅群的行为,以及设计实验场,将机器鱼和斑马鱼群置于实验场中,研究机器鱼对斑马鱼行为的影响等。但是这些试验台都是临时性的,不具备给机器人充电和维持动物群体生存的条件,即每次实验前需要手动给机器人充电,且动物群体饲养在实验场之外的地方,每次实验的时候才把动物群体部署到实验场中。因此每次只能进行数小时的实验,实验时常有限。
7.由于动物群体的行为机理尚不明确,带有黑箱的特征,因此难以通过建模对机器人-动物混合群体的行为展开研究。强化学习是群体智能领域常用的一种研究方法,通过试错-总结的方式得到能够产生预期群体行为的个体行为规则。但是强化学习需要经过长时间大量实验才能得到结果,因此现有的实验平台无法满足这一要求。
技术实现要素:
8.本发明主要解决现有技术的实验台具有临时性,实验时间有限,无法获得足够支
持强化学习的数据的问题;提供一种用于机器人-动物混合群体行为研究的实验台,能够连续进行长达数天乃至数周的实验,从而为基于强化学习的机器人-动物混合群体行为研究提供条件。
9.本发明的上述技术问题主要是通过下述技术方案得以解决的:一种用于机器人-动物混合群体行为研究的实验台,包括:实验场,用于为动物组群和机器人组群提供互动交互场地,设置有维持动动物组群生存的生命维持装置以及为机器人组群供电的充电区域;机器人组群,体积处于动物组群的体积范围内;视觉监测单元,获取识别机器人组群中各机器人的身份、位置和位姿,识别动物群体中动物的分布和状态;主控单元,根据视觉监测单元反馈的数据,给机器人下达行为命令。
10.本方案的实验台,设置了生命维持装置,为动物群组提供了维持生命所需的物质;设置有充电区域,为机器人供电;提供了长时间运行实验台进行混合群体行为研究的基础。机器人组群的体积与动物组群的体积相似,便于机器人与动物组群交互,为交互提供便利。
11.作为优选,所述的生命维持装置与充电区域分别设置在实验场的两侧;所述的充电区域中设置有无线充电底盘。生命维持装置与充电区域分离,分别维持两者的长时间实验,减少两个群体的互相干扰。无线充电,充电更加方便灵活,满足实验需求。
12.作为优选,所述的动物群体为蚂蚁群体;机器人为高度小于5厘米的机器人。体积小,便于在一个范围内研究。
13.作为优选,所述的实验场为封闭平台,实验场至少包括透明的上盖。封闭范围,便于群体的研究,避免研究过程的动物逃逸。
14.作为优选,所述的生命维持装置包括:换气装置,保证实验场与外接空气交换;保证实验场的通风,避免蚂蚁窒息。
15.喂食装置,为动物群体投放食物。
16.作为优选,视觉监测单元获取识别机器人组群中各机器人的身份、位置和位姿的过程为:a1:分别在机器人和与机器人等高的凸台上设置识别标签和基准点标签;a2:获取检测图像中所有的标签,形成标签集合;获取基准点标签的旋转矩阵和平移向量,解算标签集合中识别标签的位置与姿态;a3:得到机器人的位置与姿态,构成身份、位置和位姿的元组。
17.通过解算获得机器人的身份、位置和位姿。
18.作为优选,解算过程为:预先对视觉监测单元中的相机进行标定,获得相机的内参矩阵:其中f
x
,fy为焦距,c
x
,cy为光轴在图像坐标系中的偏移量;获取当前图像中所有的标签,形成集合c
tag
;判断基准点标签是否在集合c
tag
中,若不在,结束当前迭代,若在,继续下一步;
获取基准点标签的旋转矩阵r和平移向量t;解算集合c
tag
中识别标签的位置和姿态;也就是相应机器人的位置和姿态。
19.对于集合c
tag
中的任意一个识别标签,获取其中心点的坐标和下边缘任意两个点的坐标,分别为(xc,yc),(x
l
,y
l
),(xr,yr),计算这三个点相对于基准点标签的世界坐标位置:其中r
i,j
为旋转矩阵r的第i行第j列元素,tn为平移向量t的第n个元素;计算变换矩阵:k=mi·
me进一步计算:进一步计算:其中k
i,j
为变换矩阵k的第i行第j列个元素,x,y分别代入(xc,yc),(x
l
,y
l
),(xr,yr);求解线性方程组:ax=b代入(xc,yc),(x
l
,y
l
),(xr,yr),得到机器人在世界坐标系中的坐标,得到上述三个点在世界坐标系中的坐标,分别为以作为机器人的位置,进一步计算机器人的航向角:由此得到当前机器人的位置和姿态,构成如下元组:其中,id为机器人身份。
20.作为优选,视觉监测单元识别动物群体中动物的分布的过程为:b1:使用yolov5识别图片中的动物,并提供各动物的像素坐标;b2:对动物的像素坐标进行解算,获得其在以基准点标签定义的坐标系中的位置;b3:进行坐标变换,将蚂蚁的位置投影到基准点标签所在的平面,得到动物群体的位置分布。方法为将像素坐标代入ax=b,求解得到的结果就是各蚂蚁相对于基准点标签的位置。
21.本发明的有益效果是:1.设置生命维持装置,为动物群组提供了维持生命所需的物质;设置有充电区域,
为机器人供电;提供了长时间运行实验台进行混合群体行为研究的基础。
22.2.机器人组群的体积与动物组群的体积相似,便于机器人与动物组群交互,为交互提供便利。
23.3.生命维持装置与充电区域分离,分别维持两者的长时间实验,减少两个群体的互相干扰。
附图说明
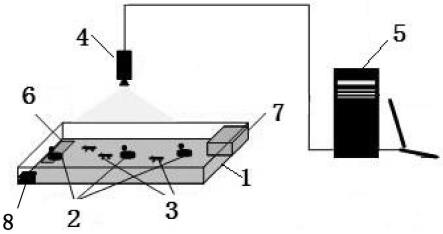
24.图1是本发明的一种群体行为研究试验台的连接框图。
25.图中1.实验场,2.机器人,3.蚂蚁,4.视觉监测单元,5.主控单元,6.无线充电底盘,7.生命维持装置,8.基准台。
具体实施方式
26.下面通过实施例,并结合附图,对本发明的技术方案作进一步具体的说明。
27.实施例:本实施例的一种用于机器人-动物混合群体行为研究的实验台,如图1所示,包括:实验场1、机器人组群、动物组群、视觉监测单元4和主控单元5。
28.机器人组群和动物组群设置在实验场1上,视觉监测单元4设置在实验场1上方用于记录实验场1中的场景以及对机器人和动物定位。视觉监测单元4将获取的数据发送到主控单元5中,主控单元5对该数据进行计算,获取机器人的id、位置和位姿;以及动物的位置和状态等信息,再下达对应的行动命令给对应的机器人。
29.在本实施例中,动物组群为蚂蚁3群体。机器人2为高度小于5厘米的微型机器人。体积小,便于在一个范围内研究。
30.实验场1用于为动物组群和机器人组群提供互动交互场地。实验场1的底板面为2米
×
2米的不透明尼龙塑料底盘,底盘有一定的粗糙度,以提高摩擦力,增加机器人的可控性。实验场1为封闭平台,实验场1还至少包括透明的上盖,上盖为透明亚克力塑料构成的罩子,对整个实验场形成完全封闭,避免蚂蚁出逃,也便于对实验场中的状态进行观察。
31.实验场1上设置有维持动动物组群生存的生命维持装置7以及为机器人组群供电的充电区域。
32.生命维持装置7与充电区域分别设置在实验场的两侧,生命维持装置与充电区域分离,分别维持两者的长时间实验,减少两个群体的互相干扰。
33.充电区域中设置有无线充电底盘6。无线充电,充电更加方便灵活,满足实验需求。
34.在实验场的另外一角设有蚁群的生活区,使用蚂蚁可以挖掘的明胶制作,供蚁群在此区域筑巢生活。生命维持装置7包括换气装置和喂食装置,换气装置用于保证实验场与外接空气交换;喂食装置为动物群体投放食物。
35.在蚂蚁的生活区还安装有用于定期投喂食物和水的喂食装置,以及安装有小型风扇,对实验场内进行换气,以免蚂蚁窒息。
36.在实验场1的一角设置有凸起的基准台8。基准台8是一个高度和机器人一致,尺度和机器人相近的平台,在顶端粘贴有一个apriltag标签,称为基准apriltag。实验场1中的坐标系基于基准apriltag建立。
37.视觉监测单元4获取识别机器人组群中各机器人的身份、位置和位姿,识别动物群体中动物的分布和状态。
38.在实验场1上方设置有高分辨率摄像头,视场覆盖整个实验场1。其采集的图像一方面用来给机器人和蚁群进行定位,一方面作为实验过程的录像记录。
39.在本实施例中,实验场1中部署有10台微小型机器人2,用于和蚁群进行互动。机器人2使用两个9g舵机作为动力机构,搭载有锂电池、无线充电模块,作为能源供给。使用esp32单片机作为主控,对舵机的转速进行控制,并使用板载的wifi和主控计算机进行通信。
40.由于群体智能的算法较为复杂,机器人所搭载的esp32单片机算力不够,且进行大量计算所需的能耗较高,机器人所搭载的电池也不足以提供足够的电量,因此机器人采取“上层智能控制+底层运动控制”解耦的结构。上层智能控制是在主控单元5的计算机中为每个微型机器人创建一个虚拟机器人,用于运行群体智能算法,形成当前机器人的运动方向和速度指令,然后通过wifi发送给机器人。机器人本身搭载的esp32解析此指令后,形成控制舵机转速的pwm控制指令,完成底层运动控制。
41.在本实施例中,实验场中封闭有由蚁后、兵蚁和工蚁组成的一个完整蚁群,可以在实验场中长期生存,和机器人群体完成互动。
42.主控单元5根据视觉监测单元反馈的数据,给机器人下达行为命令。
43.主控单元5的计算机有三项功能:(1)创建虚拟机器人,运行群体智能算法,以控制实验场内的机器人;(2)对实验场中的设备进行控制,包括控制无线充电底盘,以及对蚁群生活区的换气风扇和食物投喂装置进行控制;(3),机器人进行识别和定位,以及确定实验场内蚁群的分布。
44.机器人位置和姿态的识别通过以下方法完成:a1:分别在机器人和与机器人等高的凸台上设置识别标签和基准点标签。
45.(1)在实验场一角设置和机器人高度相同的基准台8,基准台8上粘贴apriltag标签,为基准点标签,作为坐标系的基准点。
46.(2)在各机器人顶部粘贴apriltag标签,为识别标签,其朝向与机器人正方向一致,用于对机器人完成定位和姿态识别。
47.(3)设置在实验场顶部的摄像头采集到基准apriltag和机载apriltag的图像后,对机器人的位置和姿态进行解算。
48.a2:获取检测图像中所有的标签,形成标签集合;获取基准点标签的旋转矩阵和平移向量,解算标签集合中识别标签的位置与姿态。
49.预先对视觉监测单元中的相机进行标定,获得相机的内参矩阵:其中f
x
,fy为焦距,c
x
,cy为光轴在图像坐标系中的偏移量。
50.1)检测当前图像中所有的apriltag,形成集合c
tag
。
51.2)判断基准apriltag是否在集合c
tag
中,若不在,结束当前迭代,若在,继续下一
步。
52.3)获取基准apriltag的旋转矩阵r和平移向量t。
53.4)解算形成集合c
tag
中其他apriltag的位置和姿态,也就是相应机器人的位置和姿态。对于集合c
tag
的任意一个非基准apriltag的标签,获取其中心点的坐标和下边缘两个点的坐标,分别是(xc,yc),(x
l
,y
l
),(xr,yr),然后计算这三个点相对于基准apriltag的世界坐标位置,即:其中r
i,j
为旋转矩阵r的第i行第j列元素,tn为平移向量t的第n个元素。
54.由此计算变换矩阵:k=mi·
me进一步计算:进一步计算:其中k
i,j
为变换矩阵k的第i行第j列个元素,x,y分别代入(xc,yc),(x
l
,y
l
),(xr,yr);求解线性方程组:ax=b代入(xc,yc),(x
l
,y
l
),(xr,yr),得到机器人在世界坐标系中的坐标,得到上述三个点在世界坐标系中的坐标,分别是分别为
55.以机器人上布置的apriltag的中心位置,即作为机器人的位置,进一步计算机器人的航向角,即:a3:得到机器人的位置与姿态,构成身份、位置和位姿的元组。
56.由此得到当前机器人的位置和姿态,构成如下元组:其中,id为机器人身份。
57.视觉监测单元识别动物群体中动物的分布的过程为:b1:使用yolov5识别图片中的动物,并提供各动物的像素坐标。
58.b2:对蚂蚁的像素坐标进行解算,获得其在以基准apriltag定义的坐标系中的位置。
59.b3:进行坐标变换,将蚂蚁的位置投影到基准apriltag所在的平面,得到蚁群的位置分布。
60.本方案的实验台,设置了生命维持装置,为动物群组提供了维持生命所需的物质;设置有充电区域,为机器人供电;提供了长时间运行实验台进行混合群体行为研究的基础。机器人组群的体积与动物组群的体积相似,便于机器人与动物组群交互,为交互提供便利。以连续进行长达数天乃至数周的实验,从而为基于强化学习的机器人-动物混合群体行为研究提供条件。
61.应理解,实施例仅用于说明本发明而不用于限制本发明的范围。此外应理解,在阅读了本发明讲授的内容之后,本领域技术人员可以对本发明作各种改动或修改,这些等价形式同样落于本技术所附权利要求书所限定的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1