一种砻谷机的控制与保护装置的制作方法
1.本发明属于砻谷机领域,更具体的说涉及一种砻谷机的控制与保护装置。
背景技术:
2.大米砻谷机是将稻谷去壳,制成糙米的机械加工设备,常用的胶辊砻谷机使用一对胶辊对稻谷挤压去壳,通过调节胶辊之间的挤压力来实现对稻谷的有效去壳。现有技术中,两胶辊之间间距的调节多才用人工手动调节,调节时,需要停机,在调节后,需要再次开机,进行校验,若是两胶辊之间间距不合格或者没有达到需要,则需要再次停机调整,调整次数多,调节慢,影响砻米效率。
3.另外,现有的砻谷机,在两辊轴间距过小或被砻谷稻谷量大时,不能及时的调整间距,极易出现电机卡堵至烧坏的问题。
技术实现要素:
4.本发明的目的在于提供一种砻谷机的控制与保护装置,解决现有技术中,砻谷机内两辊轴间距调整操作困难效率的问题,同时还解决砻谷机电机易出现因卡堵造成烧坏的问题。
5.本发明技术方案一种砻谷机的控制与保护装置,包括砻谷机本体,所述砻谷机本体内设置有水平且平行安装的主动辊和从动辊,所述主动辊上连接驱动电机,所述从动辊上连接有间隙调整装置,在所述驱动电机出现卡堵时,所述间隙调整装置自动调整所述从动辊和所述主动辊之间间距;
6.所述驱动电机的电机轴上安装有电机编码器,所述电机编码器与控制器连接,所述控制器控制所述间隙调整装置工作;
7.所述间隙调整装置包括设置在所述砻谷机本体两端的调整槽,所述从动辊的辊轴两端分别由两所述调整槽内穿出并分别连接有调整板,所述从动辊的辊轴的两端分别通过轴承与两所述调整板连接,所述调整板与所述砻谷机本体的端面平行并固接有调整丝杠组件,所述调整丝杠组件被所述控制器控制。
8.优选地,所述调整槽为腰形槽,且中线呈水平状设置。
9.优选地,所述砻谷机本体两端面上分别设置有与所述调整槽平行的燕尾导轨,所述调整板朝向所述砻谷机本体端面的侧面上设置有与所述燕尾导轨相适应的燕尾槽,所述调整板通过所述燕尾槽和所述燕尾导轨与所述砻谷机本体端面连接。
10.优选地,所述调整丝杠组件包括与所述调整槽平行设置的滚珠丝杠,所述滚珠丝杠一端连接有第一伺服电机,所述第一伺服电机由所述控制器控制。
11.优选地,所述砻谷机本体内还设置有出料导料装置,所述出料导料装置包括呈倾斜状设置于所述主动辊和所述从动辊底部的导料板,所述导料板的底端连接有糙米出口,所述糙米出口的侧面连接有糠壳导料管,所述糠壳导料管倾斜向上设置且另一端连接有负压风机。
12.优选地,所述导料板的高端与所述砻谷机本体铰接,导料板背面下方设置有退料出口,所述导料板背面连接有被所述控制器控制的伺服气缸。
13.本发明技术方案的一种砻谷机的控制与保护装置的有益效果是:
14.通过设置间隙调整装置,实现主动辊和从动辊之间间隙自动调整,能够在不停机状态下调整,操作简单,调整快速,能够快速获得主动辊和从动辊之间的间距。同时,通过间隙调整装置是实现主动辊和从动辊之间间距的自动调整,能够及时的纠正主动辊和从动辊卡堵的问题,避免电机出现卡堵至烧坏的问题。
附图说明
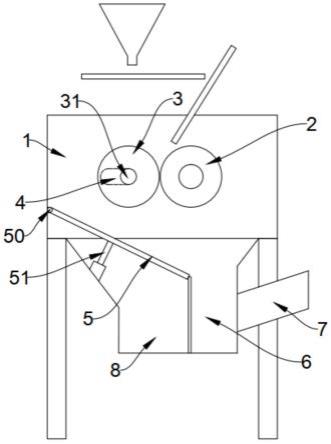
15.图1为本发明技术方案的砻谷机本体结构示意图。
16.图2为本发明技术方案的间隙调整装置立体图。
17.图3为图2的主视图。
具体实施方式
18.为便于本领域技术人员理解本发明技术方案,现结合说明书附图对本发明技术方案做进一步的说明。
19.如图1和图2所示,本发明技术方案一种砻谷机的控制与保护装置,包括砻谷机本体1,砻谷机本体1内设置有水平且平行安装的主动辊2和从动辊3,主动辊2上连接驱动电机21,从动辊3上连接有间隙调整装置9。在驱动电机21出现卡堵时,间隙调整装置9自动调整从动辊3和主动辊2之间间距。
20.驱动电机21的电机轴上安装有电机编码器,电机编码器与控制器连接,控制器控制间隙调整装置9工作。
21.间隙调整装置9包括设置在砻谷机本体1两端的调整槽4,从动辊3的辊轴31两端分别由两调整槽4内穿出并分别连接有调整板91,从动辊3的辊轴31的两端分别通过轴承与两调整板91连接。调整板91与砻谷机本体的端面平行并固接有调整丝杠组件,调整丝杠组件被控制器控制。
22.基于上述技术方案,电机编码器实时获得驱动电机21输出的转速,然后将驱动电机21转速信号传递至控制器,控制器将本驱动电机实时转速与电机正常工作的设定的转速相比较,若驱动电机的实时转速与驱动电机正常工作转速设定值相当,在误差范围内,在控制器判断驱动电机在正常工作范围内。若驱动电机的实时转速小于驱动电机正常工作转速,且超出了误差范围内,则控制器判定驱动电机卡堵。此时,控制器将控制间隙调整装置9工作,使得间隙调整装置9带动从动辊3的辊轴31沿着调整槽4移动,并做远离主动辊的运动,实现主动辊2和从动辊3之间间距的调节。
23.在主动辊2和从动辊3之间距离调整后,驱动电机转速恢复,与驱动电机正常工作转速设定值相当,者电机卡堵现象消除,此时,需要观察和检验获得的糙米状态,若是糙米状态复合要求,则主动辊2和从动辊3可以按照本间距继续工作,实现砻米。若是糙米中稻谷量高,获得的糙米不符合要求,需要继续通过间隙调整装置9缩小主动辊2和从动辊3之间距离,直至获得符合要求的糙米。
24.本技术方案中,调整槽为腰形槽,且中线呈水平状设置。腰形槽内径与从动辊3的
辊轴31外径相适应。
25.本技术方案中,砻谷机本体1两端面上分别设置有与调整槽4平行的燕尾导轨92,调整板91朝向砻谷机本体1端面的侧面上设置有与燕尾导轨92相适应的燕尾槽,调整板91通过燕尾槽和燕尾导轨92与砻谷机本体1端面连接。通过燕尾导轨92和燕尾槽的设置,一方面实现调整板91移动导向,另一方面实现调整板91的安装,结构简单方便,成本低。
26.本技术方案中,调整丝杠组件包括与调整槽4平行设置的滚珠丝杠93,滚珠丝杠93一端连接有第一伺服电机94,第一伺服电机94由控制器控制。电机编码器实时获得驱动电机21输出的转速,然后将驱动电机21转速信号传递至控制器,控制器将本驱动电机实时转速与电机正常工作的设定的转速相比较,若驱动电机的实时转速小于驱动电机正常工作转速,且超出了误差范围内,则控制器判定驱动电机卡堵。此时,控制器将控制第一伺服电机94工作。第一伺服电机94工作,带动滚珠丝杠93旋转,滚珠丝杠93将旋转运动转化为调整板91的移动,调整板91带动从动辊3做远离主动辊2的移动,实现主动辊与从动辊之间距离的调整。
27.本技术方案中,通过控制第一伺服电机94,带动从动辊2自动移动,在调整过程中不需要停机,且通过控制第一伺服电机94的输出轴的输出角度,可以实现从动辊3移动的精准控制,精度高。
28.本技术方案中,砻谷机本体1内还设置有出料导料装置,出料导料装置包括呈倾斜状设置于主动辊2和从动辊3底部的导料板5,导料板5的底端连接有糙米出口6,糙米出口6的侧面连接有糠壳导料管7,糠壳导料管7倾斜向上设置且另一端连接有负压风机。
29.基于上述技术方案,工作时,首先启动负压风机,然后启动砻米机的驱动电机,主动辊2和从动辊3实现砻米,获得糙米和糠壳的混合料,落在导料板5上,沿导料板5向下运动,进入糙米出口6,混合料中的糠壳因重量轻,在负压风机的作用下由糠壳导料管7中吸走,糙米由于重量较大,继续向下运动,由糙米出口6排出。少量的糙米因负压风机的作用运动在糠壳导料管7的口部或糠壳导料管7的内部,然后在重量的作用被停止,最后在重量作用下向下滑动,落回糙米出口6内,实现了糙米与糠壳的分离。
30.上述技术方案中,通过负压风机产生的负压吸走糠壳,有效的避免了糠壳的飞扬,保护工作环境。
31.本技术方案中,导料板5的高端50与砻谷机本体1铰接,导料板5背面下方设置有退料出口8,导料板5背面连接有被控制器控制的伺服气缸5。控制器控制伺服气缸工作,伺服气缸51回缩,导料板5向下旋转,导料板5将退料出口8的上口部位置让出,经过主动辊和从动辊的稻谷和糙米会在重力作用下直接进入退料出口8内,与前面排出的糙米分离。
32.一般的,在砻谷机启动初始时,需要对主动辊和从动辊之间距离进行调整时,伺服气缸51回缩,导料板5向下旋转,导料板5将退料出口8的上口部位置让出,经过主动辊和从动辊的稻谷和糙米会在重力作用下直接进入退料出口8内,避免其与后面加工出的糙米混合,然后退料出口8位置获得的稻米再次进行加工。
33.或者,在驱动电机21出现卡堵时,控制器控制间隙调整装置9工作,带动从动辊做远离主动辊的移动,此时主动辊与从动辊之间间隙增大,可能会导致经过从动辊和主动辊之间的稻谷不符合糙米要求,此时,控制器同步的控制伺服气缸51回缩,导料板5向下旋转,导料板5将退料出口8的上口部位置让出,经过主动辊和从动辊的稻谷和糙米会在重力作用
下直接进入退料出口8内,与前面排出的糙米分离。
34.本发明技术方案在上面结合附图对发明进行了示例性描述,显然本发明具体实现并不受上述方式的限制,只要采用了本发明的方法构思和技术方案进行的各种非实质性改进,或未经改进将发明的构思和技术方案直接应用于其它场合的,均在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1