过滤系统和用于清洁过滤面的方法与流程
1.本发明涉及一种过滤系统和一种用于清洁过滤系统的过滤面的方法。
背景技术:
2.过滤系统例如使用在导水式家用器具的泵出线路或者循环泵送线路中并且可能非常快速地被要滤出的颗粒堵塞。过滤面的机械式清洁被证明是一种有效的措施(所谓的刮拭过滤面)。在此,借助机械式刮刀(“刮板”)定期地、连续地或者根据需求地从过滤面刮除被滤出的颗粒。这种周期性地工作的系统在技术上是简单的:在这些系统中,刮板在闭合的轨道上运动,例如轴线平行的刮板棱边在柱形过滤器滤芯内部以圆周方向运动,或者在径向上的刮板棱边在平面过滤器上以圆形运动来运动。
3.wo 2019081013 a1说明了一种洗衣机,其具有滚筒、在滚筒下方的槽、水回路和用于使水循环的循环泵和管路,该水回路具有可拉出的抽屉,用于引入洗涤剂或者添加物,其中,该水回路与用于探测在水中的微纤维或者杂质的探测装置处于流体连接。此外,提出一种用于运行的方法,该方法包括将回路中循环的水量进行分流并且输送至探测器件以便分析和评估在探测器件中的水。根据这种分析评估的结果,激活借助过滤器件进行的过滤过程以便将微纤维从水中滤出。被滤出的微纤维可以被收集并且随后简单地从洗衣机中取出。
4.de 11 2006 001 349 t5说明了一种用于在通道式洗衣机中自动地除去绒毛的设备。该设备具有构造在洗涤液供入管中的开口和沿着该开口紧固在供入管上的导向叶片。柱形罩可绕着供入管转动地安放到供入管上并且通过旋转式驱动辊且转动式地被驱动。从开口流出的洗涤液经由柱形筛的侧壁受引导地被过滤以便将绒毛与洗涤液分隔开,并且被收集管送回到通道式洗衣机中。当柱形筛转动时,沉积在其侧壁内部的周面上的绒毛通过被导向叶片引导至该处的液体流而剥离、由于在具体重量上的差异而下沉、被引导至绒毛出口、并且自动地向外排出。
5.借助旋转式刮板将由此而刮削掉的颗粒以相对于运动方向倾斜的刮板棱边(例如在平面过滤器的情况下刮板在柱体或平面螺旋中的螺旋形设计)以与运动方向正交的方向移动到储存部中(在柱形滤芯的情况下例如在柱体的一侧上,在平面过滤器的情况下例如在径向外部)并且收集在该处,这种想法仅仅有条件地起作用,这是因为力矢量的对于这种推进运动必需的正交分量实际上不出现并且因此刮板的颗粒累积仅仅在运动方向上(例如简单地绕一圈)移动,而不会附加地(在可用的范围内)以轴向(或径向)方向运动。由此可能会提高这样的路段:颗粒在所述路段上移动经过过滤面,由此可能导致过滤面的提高的磨损。
技术实现要素:
6.因此,本发明的任务在于,提供一种过滤系统和一种用于清洁过滤面的方法,所述过滤系统和所述方法能够可靠地从过滤面清除颗粒并且同时确保过滤系统的提高的使用
寿命。此外,本发明的任务在于,将颗粒提供到在过滤系统中为此而设置的区域。
7.该任务通过具有权利要求1所述特征的过滤系统和具有权利要求9所述特征的用于清洁过滤面的方法来解决。
8.根据本发明的一个方面,提供一种用于导水式家用器具的过滤系统,其中,该过滤系统包括:
[0009]-具有过滤面的过滤器,用于将颗粒从流体中滤出,
[0010]-刮板,所述刮板构型用于刮拭过滤面,和
[0011]-刮板驱动器,所述刮板驱动器构型用于这样驱动刮板,使得刮板相对于过滤面以平移运动和旋转运动来运动。
[0012]
不同于现有技术地,本发明的过滤系统的刮板可以实施平移运动和旋转运动。因此,附加地,可以施加轴向(或径向)力,以便借此刮除颗粒并且将它们收集在过滤系统的为此而设置的区域中(例如在储存部中)并且在必要时在该处压缩。在此,至少区段式螺旋状刮板(例如在柱形的情况下为柱形螺旋,而在平面过滤器的情况下为平面螺旋)可以在两个维度上运动:一方面具有转动(与柱体共轴或与平面过滤器正交),另一方面具有推移运动(在柱体的情况下在轴向上,而在平面过滤器的情况下在径向上)。通过这两种基本运动的周期性组合可以得出过滤系统有利运行过程。
[0013]
平移运动(也称为纯平移、线性运动)可以是这样的运动:在所述运动中,刮板(所述刮板例如构造为刚性本体)的所有点经历同一移动(例如在几何中的平行移位)。在给定的时刻,所有点的速度和加速度可以是等同的。所有点可以在平行的轨迹上运动。与之不同的是旋转运动,在所述旋转运动中,刮板的所有点绕着共同轴线(旋转轴线)圆形地运动。
[0014]
过滤系统可以涉及这样的系统:所述系统可以通过注入口接收流体、可以将与流体一同输送的颗粒从流体中滤出,并且流体可以通过出口从过滤系统中排出。流体可以是例如由水、颗粒和洗涤物处理剂组成的混合物。此外,流体也可以是载有颗粒的气体。流体可以通过流体供给部供入到过滤系统,以便由过滤系统清除颗粒并且随后从流体出口又从过滤系统出来。颗粒可以涉及到洗涤物处理剂残留物、微塑料、洗涤物残余、杂质和诸如此类。颗粒可以由过滤器拦住,而流体可以穿过过滤器。更准确地说,过滤器可以具有初级区域,颗粒聚集在该初级区域上。过滤器的对置的次级区域在流体的流动方向上可以布置在下游。刮板可以通过与过滤器的过滤面接触而清除过滤器的初级区域(也就是过滤面)的颗粒。为此,刮板可以运动经过过滤面并且在此能够以刮板棱边与过滤面接触(尤其是面式接触)。因此,刮板可以构型用于机械式地刮拭过滤面。刮板棱边可以具有刀刃式构型。颗粒可以被刮板棱边从过滤面抬起并且在运动方向上堆积在刮板棱边前方并且与之一同移动。在此,刮板棱边可以在过滤面上留下一条已清除颗粒的狭长通道。优选地,刮板构型为具有一个或多个螺距的螺旋刮板。
[0015]
过滤器可以具有柱形的形状,在所述柱形的形状的情况下,周面和/或顶面构型为过滤面。在过滤器内部,刮板可以这样布置,使得该刮板可以相对于过滤器运动,从而将颗粒从过滤面上刮除。此外,过滤器可以由纱布膜或者金属筛或者诸如此类构成。过滤器可以具有在10μm至100μm的范围内的孔径。因此,过滤器可以适配于众多的使用领域。优选地,过滤器具有25μm至50μm的孔径。在这个范围内,能够可靠地将微塑料颗粒从流体中滤出并且甚至可以实行严格的环保规定。但同时可以确保足够的体积流通过过滤系统,以便可以有
效率地运行家用器具。
[0016]
在柱形过滤器的情况下,柱体直径与过滤器高度之间的比例可以处于0.1至0.6的范围内。在该范围内,可以由刮板实现对过滤面的特别良好的清洁,因为甚至是在流体强烈地载有颗粒的情况下也能够可靠地清洁由此产生的过滤面。优选地,该比例处于0.25至0.4的范围内。在该范围内已发现,刮板驱动器可以非常简单地构型以使刮板运动经过过滤面。因此,在这个范围内实现所使用的材料、良好的体积通过量和良好的过滤性能所构成的最佳状态。
[0017]
据此,根据本发明的过滤系统提供这样的可能性:对过滤器进行刮拭、使刮除的颗粒朝向储存部推移并且将这些颗粒在该储存部处压缩。在此,颗粒被主动地移动到储存部中,从而使起过滤作用的区域没有颗粒聚集。此外,该过滤系统主要可以使用于这样的位置:在该处,一方面,在刮拭时高的面速度是必需的(例如对于在具有重度污染的水的大体积通过量的情况下高程度的过滤性能;典型地,对于如洗衣机或者具有用于过滤器的少量安装空间的洗碗机这样的家用器具),并且,另一方面,体积流在过滤和刮拭期间不可以/不应被中断,例如在洗衣机的泵出线路中。此外,有利的是,将被刮除的颗粒从储存部中取出(或借助提取装置将这些颗粒从过滤器壳体中排出)。
[0018]
优选地,所述平移运动包括以第一平移运动方向的运动和以相反的第二平移运动方向的运动。
[0019]
换言之,刮板可以在平移运动期间在两个彼此相对的运动方向上运动。换言之,刮板可以振荡式地在过滤器中来回运动。因而确保了:被夹紧在刮板棱边与过滤面之间的颗粒不会在过滤面上无限地移动,而是在方向改变时停留在方向改变的地点上。因而,提高了过滤面的耐久性。以一个方向的平移运动可以在螺旋刮板的一个螺距上走向。换言之,在平移运动期间,刮板可以相对于过滤面在一个方向上位移一路段,该路段相应于螺旋刮板的高度。随后的旋转运动同样地可以在一个螺距和(附加地)一个回转上走向。因此,螺旋刮板又可以被带到最佳的初始位置中,以便重新执行平移运动,以便将颗粒从过滤面上刮除。
[0020]
优选地,刮板和/或刮板驱动器这样构型,使得仅仅在以第一平移运动方向平移运动期间才将颗粒从过滤面上刮除。
[0021]
换言之,在实施以第二平移运动方向的平移运动时,刮板可以同时这样旋转(也就是绕着旋转轴线转动),使得该刮板尽管以第二平移运动方向运动但不从过滤面刮除颗粒。在螺旋刮板的情况下,这种运动类同于从材料中拧出螺旋件。在此,这种螺旋件也平移式地从材料运动离开并且同时实施旋转运动。在过滤系统中,由此可以确保了颗粒仅仅在第一平移运动方向上从过滤面上移除并且因而不会在过滤面上来回移动。换言之,通过这种运动过程可以确保了颗粒仅仅在一个方向上(也就是在第一平移运动方向上)被刮板导出。接下来描述在具有螺旋刮板的过滤系统中的有利的运行过程:在刮拭开始之前,过滤系统(尤其是刮板)可以处于初始位置中,在该初始位置中,过滤器(或过滤面)被颗粒均匀地占据。然后,可以实施以第一平移运动方向的平移运动,而不使刮板旋转。在此,刮板可以使颗粒在轴向上沿着刮板轴线移动并且使这些颗粒在推进方向上堆积在刮板前方。在此,在刮板后方产生了被刮空的区域。以第一平移运动方向的平移运动可以根据过滤器的尺寸(例如过滤器壳体的尺寸)实施,直至刮板到达过滤器的末端为止。接着,刮板能够以第二平移运
动方向(也就是与先前实施的运动方向相反地)运动并且同时绕着刮板轴线转动。在此,刮板可以在旋转运动期间这样转动,使得刮板的转动与螺旋刮板的螺距成比例。因此,以第二平移运动方向的平移运动对颗粒在过滤面上的位置没有任何影响并且将刮板又定位在初始位置中。通过对所说明的运动过程进行周期性重复,使得颗粒可以聚集在过滤器的一侧上并且甚至可以被刮板压缩。
[0022]
此外,过滤系统可以包括储存部(depot),其中,刮板构型用于:将颗粒供给至储存部和/或在储存部中压缩颗粒。在此,储存部可以至少部分地布置在过滤面上,从而来自被收集在储存部中的颗粒的流体可以经由过滤器逸出。尤其是,刮板可以构型用于:压缩在储存部中的颗粒(例如通过进一步地推入另外的颗粒)。此外,可以邻接于储存部地设置取出装置和/或颗粒闸门,通过所述取出装置和/或颗粒闸门可以将颗粒从储存部中取出。上述运动过程可以周期性地重复,从而在过滤系统运行期间也可靠地清除过滤面的颗粒。
[0023]
优选地,刮板和/或刮板驱动器这样构型,使得在以第二平移运动方向平移运动期间同时地实施旋转运动。
[0024]
在此,旋转运动可以绕着刮板轴线旋转式地实施。如以上所说明地,由此可以实现,颗粒不在第二平移运动方向上移动。因此,刮板可以被带到初始位置中,而颗粒不会在过滤面上移动长的路段。因此,可以降低过滤器的磨损。
[0025]
优选地,刮板至少区段式地构造为螺旋状刮板,尤其是构造为螺旋刮板,并且刮板在旋转运动期间绕着旋转轴线转动,该旋转轴线优选地平行于过滤面。
[0026]
在这种实施方式中,刮板具有与蜗杆泵类似的构型(例如螺旋传送器,尤其是阿基米德蜗杆泵),而不是指具有蜗杆的容积泵(例如偏心蜗杆泵或者多转子蜗杆泵)。蜗杆泵的一个基本要素在于:在蜗杆旋转时,给要向前移动的物品提供一个轴向的力分量。在过滤器是柱形过滤器的情况下,旋转轴线(也就是说,在这种情况下为刮板的轴线)可以沿着过滤器的中心轴线延伸。由此可以实现:在旋转运动期间,刮板沿着过滤面相对于该过滤器运动。
[0027]
优选地,刮板至少区段式地构成为平面刮板,尤其是构成为平面螺旋(planspirale),并且刮板在旋转运动期间绕着旋转轴线转动,该旋转轴线优选与过滤面正交。
[0028]
在这种实施方式中,过滤器可以是具有平坦过滤面的过滤器,优选地,这种平面螺旋可以作为刮板在该平坦过滤面上运动。在此,优选地,刮板可以具有板式形状,该板式形状至少区段式地具有刮板棱边,该刮板棱边从刮板突出、具有螺旋形状、并且与过滤面接触。通过平面螺旋绕着旋转轴线(也就是刮板轴线)的转动,使得刮板相对于过滤面转动。在此,在这种情况下,旋转轴线与过滤面正交。正如在上述实施方式中,在这种情况下,刮板可以平移式运动,以便将颗粒以第一平移运动方向从过滤面上刮除。如果刮板随后以相反的第二平移运动方向运动并且同时通过使刮板绕着旋转轴线旋转的方式实施旋转运动,则刮板可以又被引导回到初始位置。在这种实施方式中,可以提供一种特别扁平且节省安装空间的过滤系统。在当前的实施方式中,基本原理也保持相同,也即刮板在两个维度上运动。
[0029]
优选地,刮板在旋转运动期间在完整的旋转中转动的路段与刮板在平移运动期间相对于过滤面运动的路段之间的比例小于1或者大于1。
[0030]
换言之,所述旋转运动和所述平移运动可以如此不同,以使得刮板在这两种运动
中使刮板棱边不同远地运动经过过滤面。由此可以确保了刮板不总是在过滤面上的同一部位处改变其运动方向和/或运动类型。由此可以避免高的局部的磨损。尤其是,当磨蚀性颗粒(例如石灰残留物)位于待过滤的流体中时,这可以是有利的。因此,可以避免过滤面在一个部位处的磨穿,这将必然导致过滤系统的完全停止运转。因此,由刮板在旋转运动中的位移和刮板在平移运动中的位移所构成的优选的比例接近1,例如接近0.99或者1.01。优选地,该比例接近1,例如0.99,也就是说,刮板每步只能作出这种运动的99%或者101%,而不是一个完整的螺距(或一整圈),从而在同一部位处每大约100步才重复相同的运动过程。因此,过滤系统的磨损可以尽可能广泛地分布在整个过滤面上,由此,可以在总体上提高过滤系统的使用寿命。这种比例可以例如通过齿轮传动机构(例如齿轮变速器)来获得。例如,刮板驱动器可以这样构型,以使得避免小整数部分1(或以小整数部分1增大的步进)。
[0031]
优选地,刮板驱动器可以包括滑槽和至少一个非圆齿轮,从而可以提供刮板的平移运动和旋转运动。
[0032]
因此,可以提供这样的刮板驱动器,该刮板驱动器可以实现刮板的二维运动(也就是旋转运动和平移运动)。在此,刮板的推移状态(也就是幅度、频率和变化曲线)基本上可以由起驱动作用的齿轮预先给定,而旋转主要可以由这两个齿轮的齿数比来预先给定。因此,刮板的复杂的二维运动可以借助机械上简单的系统来简单地实现,这促成了在制造过滤系统时节省成本。
[0033]
刮板可以涉及到至少区段式的多螺距的螺杆。应优选具有三个螺距的刮板。螺旋刮板可以螺纹式地构型并且包括在其柱形表面上的经轮廓化的切口,该切口在柱形内壁或外壁中连续盘旋地(也就是沿着螺旋线)延伸。这种连续凹陷可以被称作螺距/导程。
[0034]
根据本发明的另一方面,提供一种用于借助刮板给过滤面清除所滤出的颗粒的方法,其中,该方法包括以下步骤:
[0035]-通过刮板以相对于过滤面的第一平移运动方向刮拭过滤面,
[0036]-使刮板以与第一平移运动方向相反的第二平移运动方向运动,和
[0037]-在刮板以第二平移运动方向运动期间使刮板旋转。
[0038]
由此,在柱形过滤器的情况下,可以产生具有两个基本运动矢量的基本运动过程。一方面,刮板能够以旋转运动转动式地(也就是没有推进或者平移)运动。原则上,这种运动可以无限地继续,因为在转动时存在着过滤系统的周期对称性。此外,刮板能够以平移运动或者推进运动而没有转动地运动。这种运动机械式地受限并且因此必须振荡式地实施。这种运动的限制由过滤器的尺寸产生。以上所说明的基本矢量能够促成合适的运动过程,以便刮拭过滤系统的过滤面。因此,可以例如通过平移运动(推进运动)首先刮除在过滤面上的颗粒,也就是说,这些颗粒在第一平移运动方向上堆积在刮板棱边前方并且随着刮板棱边在刮板的轴向方向上的运动而移动,优选朝向储存部移动。在进一步的运动步骤中,可以实施与第一平移运动方向相反的第二平移运动方向(也就是说,向后移动并且同时与螺杆的螺距成比例地向前转动),以使螺旋刮板又运动到初始的地点,而该螺旋刮板不会将力施加到颗粒上。通过将该步骤序列在原则上无限重复,一方面可以刮拭整个过滤面,另一方面可以使颗粒破坏性地朝向储存部移动和/或在该处被压缩。
[0039]
优选地,刮板在刮拭步骤期间旋转。因此,在以第一平移运动方向平移运动时(也就是在刮拭期间)也可以实现混合运动,在该混合运动中,在该平移运动期间也叠加转动分
量。相应地,在刮板以第二平移方向运动时,可以减小转动分量。在这种情况下,可以特别简单地控制过滤系统。
[0040]
本发明能够实现:刮除过滤面、使被刮除的颗粒朝向储存部移动和/或将颗粒在该储存部处压缩。在此,颗粒可以被主动地推入到储存部中,从而起过滤作用的区域可以没有颗粒聚集。本发明特别有利的是,在此,一方面,在刮拭时高的表面速度是必需的,例如对于大体积通过量同时具有重度污染的流体和小的过滤面的情况下所需的高程度的过滤功效(例如这对于如洗衣机或者具有用于过滤系统的少量安装空间的洗碗机而言是典型的)。另一方面,体积流在过滤和刮拭期间可以得以保持,从而在将例如洗衣机的流体泵出或者循环泵送时不必考虑过滤器状态,这简化了家用器具的控制。此外,可以更轻易地将在储存部中的夹杂的颗粒取出或借助排出取装置将其从过滤系统中排出,这促成了对于使用者而言简化的手工操纵。
[0041]
如果在曲线图中描绘平移运动和旋转运动,则平移运动和旋转运动不必共同地产生任何锯齿曲线。基本上,有利的是,存在这两种运动类型的振荡,这种振荡可以在宽的界限内改变,例如以便能够在技术上简单地实施运动。可以使用例如三角函数或者具有圆角的曲线。
[0042]
根据本发明的一方面,由此产生具有两个基本运动矢量的基本运动过程(该示例是针对柱形过滤器说明的,但对于其他几何结构、例如扁平圆柱也类似地起作用):
[0043]-在没有平移的情况下转动(旋转运动)。原则上,这种运动可以无限地继续,因为在转动时存在过滤器的周期对称性。
[0044]-在没有转动的情况下推进(平移运动)。这种运动机械式地受限并且因此必须振荡式地实施。
[0045]
这两个基本矢量的序列和组合促成了合适的且优选的运动过程,例如:
[0046]-通过推进运动首先刮除在过滤面上的颗粒,也就是说,这些颗粒在刮板运动方向上聚集在刮板棱边前方,并且随着刮板棱边在轴向方向上的运动而移动,优选朝向储存部移动,
[0047]-在第二运动步骤中,实施与推进运动相反的螺旋运动(向后移动并且同时与螺旋的螺距成比例地向前转动),以使螺旋刮板又运动到初始位置,而不将力施加到颗粒上,和
[0048]-通过将该步骤序列在原则上无限重复,一方面刮拭整个过滤面,另一方面,颗粒连续地朝向储存部移动(或在该处被压缩)。
[0049]
根据本发明的另一方面,有利的是,在导水式家用器具中使用上述的过滤系统。因此,甚至是在小的安装空间上也可以实现对流体的充分且有效率的过滤。
[0050]
上文与设备相关联地解释的优点和特征类似地也适用于所述方法并且反之亦然。本发明的单个的特征或者方面可以相互组合并且具有在本上下文中所解释的优点。
附图说明
[0051]
以下,参照附图根据有利的实施例详细地解释本发明。在此示出:
[0052]
图1示出根据本发明的实施方式的刮板的示意性的示图,
[0053]
图2示出根据本发明的实施方式的过滤系统的示意性的截面视图,
[0054]
图3a、3b和3c分别示出在根据本发明的实施方式的过滤系统中的刮板的不同的运
行位置,
[0055]
图4示出根据本发明的实施方式的过滤系统的示意性的视图,
[0056]
图5示出在根据本发明的实施方式的过滤系统中的运动过程在曲线图中的表示,
[0057]
图6示出在根据本发明的实施方式的过滤系统中的运动过程在曲线图中的表示,
[0058]
图7示出在根据本发明的实施方式的过滤系统中的运动过程在曲线图中的表示,和
[0059]
图8示出在根据本发明的实施方式的过滤系统中的运动过程在曲线图中的表示。
具体实施方式
[0060]
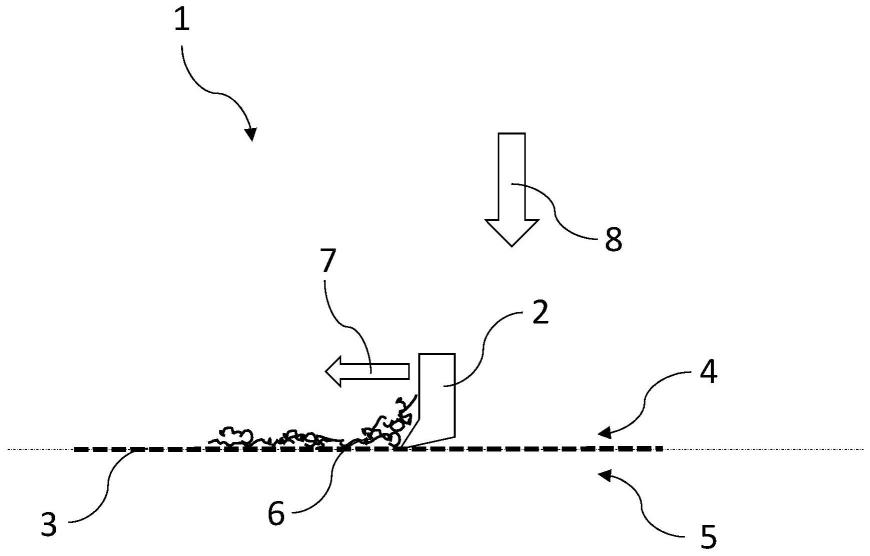
图1示出了在根据本发明的实施方式的过滤系统1中的刮板2和过滤面3的示意性的侧视图。在此,在图1中尤其示出刮板的基本原理。在此,刮板2构型为刀刃式地成形的刮板棱边并且压向被颗粒6占据的过滤面3并且运动经过该过滤面3。由于刮板棱边的形状,颗粒6被从过滤面3移开并且以运动方向(第一平移运动方向7)堆积在刮板棱边前方并且与该刮板棱边一起被进一步推动。因此,刮板2可以机械式刮拭该过滤面。此外,在图1中示意性地示出流体注入部8,该流体注入部8表明:流体从过滤面3的哪一侧被提供给过滤系统1。来自流体的颗粒6被过滤面3阻拦在初级区域4上。接着,流体流经该过滤面3(也就是流经过滤器)并且在过滤面3的次级区域5上从过滤器出来并且在进一步的走向上又离开过滤系统1。因此,颗粒6在过滤系统1中被挡住。
[0061]
过滤器(或过滤面3)由纱布膜或者金属筛构成并且因此不会将任何定向的力施加到颗粒6上。因此,在过滤面3上的颗粒6在颗粒的平移式移动中可以克服与平移式移动方向相反的力分量。这主要由于在刮板2运动时颗粒6在刮板2(或过滤面3)上的静摩擦和滑动摩擦的相互作用而发生。由此,这些颗粒6将基本上跟随刮板2的在前推进的棱边的运动。因此,当刮板2绕着柱体轴线转动时,颗粒6主要是在圆上移动,而当刮板在轴线方向上运动时,颗粒主要在轴线方向上移动。
[0062]
从这种认识可推断出:例如在转动式运动并且与过滤面接触的螺旋状的刮板的情况下,颗粒在圆形轨道上移动经过该过滤面。颗粒在一路段上移动经过该过滤面,由此,该路段被延长,这可能导致过滤面(或过滤器)的提高的磨损。
[0063]
此外,本发明通过提供刮板2的具有两个基本向量的基本运动过程来设法解决这个问题。为此,在图2中示意性地示出在柱形过滤器中的螺旋刮板2。在图2的左侧上示出穿过该过滤器的示意性的纵截面,并且,在其右侧上示出过滤器的俯视图。柱形过滤器的周面构成过滤面3。此外,在图2所示出的示例中,刮板2具有相对于平移运动方向倾斜地设置的刮板棱边。在刮板2轴向(也就是在图2的图平面内向左或者向右)移动时,颗粒6在运动方向上堆积在刮板前方。换言之,颗粒6在运动方向上与刮板2一同移动。对于颗粒6的侧向偏转(在图2中在朝上的方向上),缺少侧向的力分量。
[0064]
在图2中的实施方式是多种可能的实施方式中的仅仅一种,因为还可以设想,过滤
面3构型为平坦过滤面(也就是作为在图2中的柱形过滤面的展开)并且将刮板2作为螺旋装入。无论如何,产生一种基本运动过程,其具有两个基本运动矢量:
[0065]
·
在不具有平移式运动情况下的旋转运动,该旋转运动原则上可以无限地继续,因为在旋转运动中存在过滤器的柱形对称性。
[0066]
·
还得出在不具有旋转运动的情况下的平移运动,该平移运动机械式地受限并且因此必须振荡式地实施。
[0067]
平移运动的机械式限制由在过滤系统1内部的有限的空间关系产生,因此,刮板2不可能在一个方向上无限地移动。这些基本矢量的组合促成根据本发明的运动过程。通过平移运动(也就是推进运动)首先将过滤面3上的颗粒6刮除,从而使得这些颗粒6以第一平移运动方向7聚集在刮板棱边前方并且随着刮板2的运动而以第一平移运动方向7(也就是以螺旋刮板的轴向方向)移动。在此,可以将颗粒6例如移动到布置在过滤系统1中的储存部中。接着,刮板2可以平移式地以与第一平移运动方向7相反的第二平移运动方向9运动并且同时可以旋转。换言之,刮板2向后移动并且同时向前转动。在此,第二平移运动方向9的平移运动与螺旋刮板2的螺距成比例。因此,刮板2又可以运动到最初的位置(也就是初始位置),而无需将任何力施加到颗粒6上。换言之,在刮板2以第二平移运动方向9的运动中,没有颗粒6被从过滤面3取走。原则上,这个运动过程可以无限地重复,以便刮拭整个过滤面3。此外,通过对这个步骤序列的重复,颗粒6可以朝向过滤器中的储存部连续地移动和/或在该处被压缩。
[0068]
为了直观地说明,以下根据图3a至3c说明步骤序列。在图3a至3c中示出与在图2中相同的过滤系统1。
[0069]
在图3a中,刮板2处于其初始位置中。在这种情况下,过滤面3被颗粒6均匀地占据。
[0070]
在图3b中,刮板2开始以第一平移运动方向7的平移运动,从而刮板2使颗粒6以第一平移运动方向7(刮板2的轴向方向)移动并且颗粒6在第一平移运动方向7上堆积在刮板2前方。由于这种运动,在刮板2后方产生被刮空的区域,这个被刮空的区域可用于流体的进一步过滤。在图3b中的箭头阐明了刮板2以第一平移运动方向7的运动。
[0071]
在图3c中示出,刮板2如何以第二平移运动方向9并且同时以与刮板2的螺距成比例的旋转运动向后移动,以便将刮板又带到在图3a中所示出的初始位置中。在此,刮板2的旋转运动与螺旋刮板2的螺距成比例,从而在图3c中所示出的运动(平移运动和旋转运动)对颗粒6不具有作用。
[0072]
图4示出来自图2和3的过滤系统1在图3a至3c中所示出的运动过程的周期性重复之后的示意性的视图。由此,这些颗粒6可以被提供给过滤系统1中的一个区域(例如储存部)并且被后续送入的颗粒6压缩。颗粒6在过滤系统1中聚集在一个区域中,在该区域中,可以设置取出装置和/或颗粒闸门(未示出),以便将颗粒6从过滤系统1取出。
[0073]
图5是表示在过滤系统1中的刮板2的基本运动过程的曲线图。在此,在x轴上示出以第一和第二平移运动方向9的运动。在轴上示出刮板2绕着其旋转轴线的转动。在图3b中所示出的平移运动相应于在图5中这样的运动箭头:该运动箭头从曲线图的原点延伸至x轴上的点h。随后的运动箭头(该运动箭头与轴上的点2π对角地延伸)相应于在图3c中所示出的、与旋转运动一起的第二平移运动9。换言之,刮板2以绕着刮板轴线的螺旋运动(也就是转动)这样与沿着刮板轴线的移动相组合,使得产生组合运动。在此,在刮板2和正
交于刮板棱边的过滤面3之间不产生相对运动。由于系统在方向上具有周期对称性,因此单个步骤可以任意多次地相继地实施,也就是说,转动运动可以无限地继续。在x方向上,运动以机械方式受限,因此运动在该处必须是振荡式的。
[0074]
在图6中示出与在图5中相同的曲线图,其中,在这种实施方式中,以第一平移运动方向7的平移运动小于先前的实施方式中的平移运动。换言之,刮板2在第一平移运动方向7上的运动可以相应于小于螺旋刮板2的全螺距。同样地,在随后的在第二平移运动方向9上的组合平移运动和旋转运动中,刮板转动少于一整个回转。因此,对于上述两个基本矢量,不利用刮板2的整个回转或完整的螺距,而是利用例如较小的份额(例如99%)。由此,相同的运动仅在大约100个周期之后才在同一部位处重复,由此,过滤面3的磨损广泛地分布(也就是在整个过滤面3上)并且因而降低了点状过滤面损坏的风险。
[0075]
在图7中示出本发明的一种另外的实施方式。为此,在图7中示出如先前所说明的附图中的曲线图。在当前的实施方式中,刮板2可以实施混合运动,从而在以第一平移运动方向7的平移运动中已经实施了旋转运动。与之相应地,在以第二平移运动方向9的平移运动中,旋转运动相应地减小。换言之,在刮板2移动时(也就是在将颗粒6从过滤面3上刮除时),也可以叠加转动分量,其中,在刮板2旋转回来时,转动分量相应地减小。
[0076]
在图8中示出本发明的一种另外的实施方式。在此,图8的曲线图相应于先前所说明的曲线图。在当前的实施方式中,通过平移运动和旋转运动的组合,实现了弯曲的运动轨道,由此,尤其是在刮板2起动时和减速时可以保护过滤面3。但同时能够将颗粒6从过滤面3上可靠地清除。
[0077]
实际上,任意周期函数都可设想用于完成本发明的任务,从而刮板2的平移运动和旋转运动的共同作用可以适于任意的过滤系统。
[0078]
附图标记列表
[0079]1ꢀꢀ
过滤系统
[0080]2ꢀꢀ
刮板
[0081]3ꢀꢀ
过滤面
[0082]4ꢀꢀ
初级区域
[0083]5ꢀꢀ
次级区域
[0084]6ꢀꢀ
颗粒
[0085]7ꢀꢀ
第一平移运动方向
[0086]8ꢀꢀ
流体注入部
[0087]9ꢀꢀ
第二平移运动方向
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1