基于目标检测的可实时控制喷淋系统及控制方法
1.本发明属于市政技术领域,具体涉及一种基于目标检测的可实时控制喷淋系统及控制方法。
背景技术:
2.如今建筑工地上常用的降尘喷淋系统主要为固定式系统。固定式喷雾降尘系统是将喷淋头按一定间隔设置于工地围挡、道路、楼层、塔吊、封闭垃圾站等位置,同时包含少量雾炮机的喷淋降尘系统。其系统工作方式大都是在固定时间段进行全覆盖喷淋降尘,也有少部分工地采用围挡喷淋全天工作的方式来达到降尘目的。然而,固定式喷淋系统无法做到对扬尘的实时控制,为保证降尘效果,只能加大喷淋水量与喷淋时间,极大地造成了水资源浪费,加大了城市用水压力,增加了施工成本。
3.现有的针对喷淋系统的控制系统主要包括以下两个方面缺陷:
4.第一,在空气中粉尘较高时段人为设置喷淋时长与喷淋量大小,并不能在降尘效果达到后及时关闭喷淋;
5.第二,通过全覆盖式开启围挡喷淋、塔吊喷淋等,无法智能识别工地环境,常常弄湿施工人员与施工机械,进一步恶化了施工环境,加大了人员滑倒、触电,机械故障、漏电的风险。
6.第三,现有喷雾降尘系统存在功能单一,效率低下,浪费水资源,加剧施工风险等问题,已无法满足我国建筑业深度转型升级,建筑业与信息化、智能化深度融合的要求。
技术实现要素:
7.针对上述现有技术的不足,本发明所要解决的技术问题是:如何提供一种基于目标检测的可实时控制喷淋系统及控制方法,实现智能检测,从而实现智能可控制式喷淋。
8.一种基于目标检测的可实时控制喷淋系统,其关键技术在于:包括水泵、水管和连接在水管上的k个离心雾化喷头组件,k个上述离心雾化喷头组件分布安装在粉尘控制区域;
9.还包括上位机和下位机,上述上位机与云端服务器连接,上述上位机和上述下位机连接;
10.上述粉尘控制区域还分布安装有m个粉尘浓度传感器、n个单目摄像头和n个激光雷达测距传感器;
11.上述上位机的粉尘浓度检测端排上连接有m个上述粉尘浓度传感器,上述上位机的摄像端排上连接有n个上述单目摄像头,上述单目摄像头用于进行目标对象检测,上述上位机的测距端排上连接有n个上述激光雷达测距传感器;n个上述单目摄像头与n个上述激光雷达测距传感器一一对应成对安装;
12.上述下位机的水泵启停控制端与水泵连接,k个上述离心雾化喷头组件水流前端均安装有一个电磁阀,k个上述电磁阀与上述下位机的电磁阀控制端排连接;上述下位机的
报警控制端排上连接有n个报警器,n个上述报警器的安装位置与上述单目摄像头安装位置一一对应。
13.通过上述设计,结合分布式安装的粉尘浓度传感器,对粉尘控制区域进行实时粉尘检测;同时结合电磁阀和离心雾化喷头实现对粉尘实时可控制式的喷洒水来降尘。并且结合施工现场,形成智能化可控制式智能喷水控制,当有人或者机械等目标对象经过喷水区域时,结合单目摄像头获取画面图像、激光雷达测距传感器对目标进行测距等操作,实现对目标对象所在位置进行定位后,再根据定位实现对其所在区域的离心雾化喷头的喷水进行智能化控制。
14.再进一步地,上述离心雾化喷头组件包括自开闭阀门和雾化喷头,上述自开闭阀门的出口与上述雾化喷头的入口连通;
15.上述雾化喷头包括喷头外壳,该喷头外壳内设有内芯,该内芯将上述喷头外壳的内腔分隔为进水腔和出水腔,在上述内芯上贯通有若干旋流通道,上述旋流通道的两端分别与上述进水腔和上述出水腔连通,上述进水腔与上述自开闭阀门的出口连通,在上述喷头外壳上还设有雾化喷孔,该雾化喷孔将上述喷头外壳的外部与上述出水腔连通;其特征在于:上述喷头外壳的一部分内壁形成出水外壁,上述内芯的一部分外壁形成出水内壁,上述出水外壁和上述出水内壁之间约束成上述出水腔;上述出水外壁包括中心线相互重合的第一圆筒段、第一弧面段和圆面段,上述第一弧面段连接在上述第一圆筒段和上述圆面段之间,上述第一圆筒段的半径为r1,上述第一弧面段的半径为r2,上述第一弧面段的弧长为πr2/2,上述圆面段的半径为r3,r2+r3=r1,上述第一圆筒段的一端与上述第一弧面段的一端相切并直线过渡连接,上述第一弧面段的另一端与上述圆面段的外边缘相切并直线过渡连接,上述圆面段的中心线垂直于其所在平面,上述雾化喷孔开设在上述圆面段的中心位置;述出水内壁包括中心线相互重合的第二圆筒段、第二弧面段和锥形导出面,上述第二弧面段连接在上述第二圆筒段和上述锥形导出面之间,上述第二圆筒段的半径为r1,上述第二弧面段的半径为r2,上述第二弧面段的弧长为πr2/2,上述锥形导出面的底部圆半径为r3,r2+r3=r1,上述第二圆筒段的一端与上述第二弧面段的一端相切并直线过渡连接,上述第二弧面段的另一端与上述锥形导出面的底部圆连接,上述锥形导出面的顶部朝向上述雾化喷孔;上述第一圆筒段的中心线与上述第二圆筒段的中心线重合,上述第一圆筒段和上述第二圆筒段之间形成环状的直线引流腔,上述旋流通道与该直线引流腔连通。
16.采用上述方案,离心雾化喷头组件的喷头通过采用斜向进水方式进行离心,从而兼有切向旋流和纵向旋流的特点,并通过夹层状的出水腔对旋流后的实体进行约束,减少湍流情况发生;能得到更密、更均匀的雾化液滴,并能提高一定射程。
17.再进一步地,每个上述旋流通道分别围绕上述第二圆筒段的中心线螺旋盘设,上述旋流通道的入口端与上述进水腔连通,上述旋流通道的出口端向上述进水腔的方向螺旋盘绕的同时径向向外延伸;上述内芯上设有一圈环状的旋流引出腔,该旋流引出腔的入口端与所有上述旋流通道的出口端连通,上述旋流引出腔的出口端径向向外延伸并与上述直线引流腔对接连通;
18.在上述内芯上对应上述锥形导出面设有顶针孔,该顶针孔内活动镶设有顶针块,上述顶针块的伸出端端面形成上述锥形导出面,在上述顶针孔的底部还设有喷孔封闭弹簧,该喷孔封闭弹簧作用于上述顶针块使其有靠近上述出水外壁的趋势,上述出水腔内部
的水压作用于上述锥形导出面,使上述顶针块具有远离上述出水外壁的趋势;
19.上述雾化喷孔包括依次连通的内侧锥孔段、中间段和外侧锥孔段,上述内侧锥孔段的大孔端与上述出水腔连通,上述内侧锥孔段的小孔端与上述中间段连通,上述外侧锥孔段的小口端上述中间段连通,上述外侧锥孔段的大口端与上述喷头外壳的外部连通,上述内侧锥孔段的锥度小于上述外侧锥孔段的锥度;述顶针块的锥形导出面上还设有与上述雾化喷孔相匹配的密封头。
20.再进一步地,上述进水腔呈圆柱状,上述进水腔的中心线与上述第二圆筒段的中心线重合,在上述进水腔内设有与其共中心线的筒状滤网,上述旋流通道的入口端环向均匀分布在上述筒状滤网的外侧;在上述喷头外壳上设有喷头入口,上述筒状滤网的一端与上述内芯抵靠封闭,上述筒状滤网的另一端与上述喷头入口连通;
21.上述喷头外壳包括相互扣合的前盖和后盖,上述内芯的边缘密封夹设在上述前盖和上述后盖之间,上述前盖的内壁形成上述出水外壁,上述后盖的内部形成上述进水腔;
22.上述筒状滤网的一端固定连接有滤网固定座,在上述内芯上设有与上述滤网固定座相对应的滤网固定孔,上述滤网固定座螺纹连接在上述滤网固定孔内,上述筒状滤网的活动端插设在所喷头入口内,上述筒状滤网的活动端的外壁与上述喷头入口的内壁贴合并密封;
23.在上述内芯上围绕上述滤网固定孔设有一圈楔形导向环,上述楔形导向环的一端端面与上述内芯连接,上述楔形导向环的另一端厚度逐渐减小为零,上述楔形导向环的内壁与上述滤网固定座的外壁贴紧,上述楔形导向环的外壁为形成环形导向斜面。
24.再进一步地,上述自开闭阀门包括阀门外壳,上述阀门外壳上设有阀门入口和阀门出口,在上述阀门外壳内设有两个正对的阀芯座,两个上述阀芯座分居于上述阀门入口和上述阀门出口的连线的两侧,上述阀芯座滑动装配在上述阀门外壳内,两个上述阀芯座在滑动时相互靠近或远离;
25.两个上述阀芯座的正面相互靠近,两个上述阀芯座的背面相互远离,上述阀芯座的正面包括依次连接的受压斜面、封闭平面和泄压斜面,两个上述阀芯座的封闭平面相互靠近并贴合抵紧,上述受压斜面分别靠近并朝向上述阀门入口,上述泄压斜面分别靠近并朝向上述阀门出口,两个上述阀芯座之间形成可调节流道,两个上述阀芯座与上述阀门外壳之间形成芯座调节腔,上述芯座调节腔与上述可调节流道之间通过对应的上述阀芯座隔断;在上述阀芯座的背面分别连接有阀芯弹簧,上述阀芯弹簧与上述阀门外壳的内壁连接抵紧。
26.一种基于目标检测的可实时控制喷淋系统的控制方法,其关键技术在于:
27.预设定:设定人、移动加工设备和大型机械设备作为目标对象;设定粉尘浓度阈值;
28.步骤一:上位机获取单目摄像头检测的粉尘控制区域内的实时画面图像和粉尘浓度传感器检测的粉尘控制区域内的粉尘浓度;并根据实时画面图像,采用目标检测yolo算法捕捉和识别目标对象,并确定目标对象的目标方位;
29.步骤二:若检测到有目标对象,则上位机控制与上述单目摄像头对应的激光雷达测距传感器测量从目标对象到对应单目摄像头的目标距离;
30.步骤三:上位机向下位机发送目标信号,
31.上述目标信号至少包括目标对象类型、粉尘控制区域内的粉尘浓度、目标方位、目标距离;
32.步骤四:下位机比较当前时刻的粉尘浓度与粉尘浓度阈值,若超出;进入步骤五;否则返回步骤一;
33.步骤五:下位机根据目标对象,启动喷淋和报警。
34.采用上述步骤,上位机和下位机配合情况下,对粉尘控制区域内的粉尘进行实时喷淋的情况下,并对目标对象进行实时监测。在粉尘浓度超标时,且粉尘控制区域内有目标对象时,根据目标对象的类型进行智能化控制,或者继续喷淋,或者发出警报或者停止喷淋,等待目标对象消失后,再继续喷淋。
35.再进一步地,步骤一中采用目标检测yolo算法捕捉和识别目标对象的具体步骤为:
36.s11:采用主干网络模块cspdarknet53对单目摄像头拍摄的画面图像进行特征提取,分别得到s1
×
s1、s2
×
s2、s3
×
s3三个不同尺度的有效特征图;其中,s1=2s2=4s3;
37.s12:对s3
×
s3大小的特征图,利用由多尺度卷积核和注意力机制构成的attention-i-f模块对其进行预处理;得到s3
×
s3大小的特征图的预处理图;
38.s13:将s1
×
s1、s2
×
s2有效特征图和s3
×
s3的预处理图输入到spp模块后,再采用attention-i-f模块对输出进行处理,对不同池化窗口得到的特征进一步添加注意力,得到添加注意力的有效特征图;
39.s14:将步骤s13输出的3个添加注意力的有效特征图输入到panet模块,实现3个不同尺度添加注意力的有效特征图融合,得到融合有效特征图;
40.s15:将融合有效特征图输入到res-d-cbam模块,对融合效特征图中的目标检测信息进行增强或者抑制,得到特征突出有效特征图;
41.s16:根据所有目标对象的特征,特征突出有效特征图进行预测,得到画面图像中的目标对象类型。
42.步骤s11中,上述主干网络模块cspdarknet53对画面图像样本进行处理时,交叉熵损失引入平衡样本因子和分类难易因子,得到最终的改进型交叉熵损失函数公式为:
43.fl
loss
=-α
t
(1-p
t
)
γ
log(p
t
)
44.α
t
为平衡样本调节权重因子;(1-p
t
)
γ
为样本难易分类调节权重因子;γ为聚焦参数,γ越大则权重降低的程度就越大;p
t
为置信度损失;p表示画面图像预测类别的概率。
45.画面图像样本中按照是否有目标对象分类则包括有目标对象样本和没有目标对象样本,存在正负样本不平衡问题。画面图像样本中按照分类难易程度包括易分类样本和难分类样本,存在难易样本的区分的问题。
46.则为了解决上述正负样本不平衡问题和难易样本的区分的问题,对yolo算法中的交叉熵损失函数进行改进,得到上述改进型交叉熵损失函数公式。
47.再进一步的算法:s16中,在进行目标对象识别时,引入了适用于人脸识别的改进型focal loss的损失函数:
48.loss=l
loc
+l
conf
;
49.其中,l
loc
为预测结果的回归损失函数:
[0050][0051][0052][0053][0054]
其中,s
×
s表示将输入图像划分成s
×
s的网格,s为s1或者s2或者s3;
[0055]
n表示每个网格上产生的先验框个数;
[0056]
若待检测物体的中心落在第i个网格的第j个先验框中,则若待检测物体的中心落在第i个网格的第j个先验框中,则否则
[0057]ci
和分别表示预测得到的置信度和实际的置信度值;
[0058]
l
ciou
为ciou损失;
[0059]
c为真实框和预测框的最小闭包的对角线距离;
[0060]
ρ2(b,b
gt
)表示预测框和真实框中心点之间的欧氏距离
[0061]wgt
和h
gt
分别为真实框的宽和高;
[0062]
w和h分别为预测框的宽和高.v用于衡量长宽比的一致性;
[0063]
α是用于权衡的参数;
[0064]
l
conf
为预测结果的置信度损失函数,具体公式为:
[0065][0066]
β为改进的置信度损失添加了控制因子;
[0067]
(1-ci)
γ
为调节难分类样本和易分类样本的权重。
[0068]
10、根据权利要求6上述的基于目标检测的可实时控制喷淋系统的控制方法,其特征在于:步骤五中,若目标对象为大型机械设备,上述下位机控制对应的报警器进行报警;
[0069]
若目标对象为人或者移动加工设备,上述下位机控制对应电磁阀关闭,对应离心雾化喷头组件停止喷淋;
[0070]
若没有目标对象,上述下位机控制对应电磁阀开启。
[0071]
结合焦点损失函数和行人检测的特点,对损失函数进行了改进,从而提高网络的检测能力。
[0072]
本发明的效果为:
[0073]
该控制系统能根据单目摄像头所采集到的图像信息,精准捕捉到目标对象,计算
出目标对象的位置和相对距离,并结合实时pm2.5/pm10粉尘浓度,根据目标对象的相关参数来决定是否中断喷淋或者发出警报,准确控制喷淋。当物体出现在单目摄像头监控范围内时,摄像头会准确识别出物体是出于靠近状态还是远离状态,根据该特征自动调节控制参数。如果物体处于靠近状态且相对距离小于一定值,上位机将智能根据提前设置好的算法决策是否中断喷淋或发出警报,并准备迎接下一次识别捕捉,待降到阈值以下后及时停止喷淋。离心雾化喷头组件的喷头通过采用斜向进水方式进行离心,从而兼有切向旋流和纵向旋流的特点,并通过夹层状的出水腔对旋流后的实体进行约束,减少湍流情况发生;能得到更密、更均匀的雾化液滴,并能提高一定射程。
附图说明
[0074]
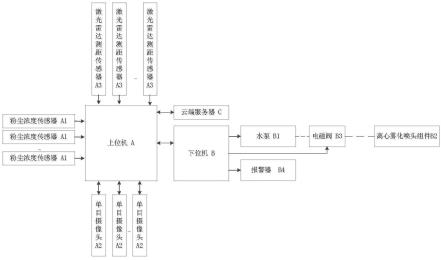
图1为本发明喷淋系统控制框图;
[0075]
图2为喷淋控制流程图;
[0076]
图3为目标检测yolo算法捕捉和识别目标对象流程图;
[0077]
图4为算法改进前后精度曲线对比图;
[0078]
图5为检测效果对比图;
[0079]
图6为本发明离心雾化喷头的结构示意图;
[0080]
图7为图6的i部放大图;
[0081]
图8为旋流通道23a在内芯23内的走向示意图;
[0082]
图9为内芯23的平面结构示意图;
[0083]
图10为第一圆筒段、第一弧面段、圆面段、第二圆筒段、第二弧面段和锥形导出面的尺寸标记图;
[0084]
图11为对比喷头1主要部分的结构示意图;
[0085]
图12为对比喷头2主要部分的结构示意图;
[0086]
图13为雾化液滴的粒径分布曲线图。
具体实施方式
[0087]
下面结合附图对本发明作进一步的详细说明。
[0088]
具体实施时:如图1至图13所示,
[0089]
一种基于目标检测的可实时控制喷淋系统,参见图1,包括水泵1、水管和连接在水管上的k个离心雾化喷头组件b2,k个上述离心雾化喷头组件b2分布安装在粉尘控制区域;
[0090]
还包括上位机a和下位机b,上述上位机a与云端服务器c连接,上述上位机a和上述下位机b连接;
[0091]
上述粉尘控制区域还分布安装有m个粉尘浓度传感器a1、n个单目摄像头a2和n个激光雷达测距传感器a3;
[0092]
上述上位机a的粉尘浓度检测端排上连接有m个上述粉尘浓度传感器a1,上述上位机a的摄像端排上连接有n个上述单目摄像头a2,上述单目摄像头a2用于进行目标对象检测,上述上位机a的测距端排上连接有n个上述激光雷达测距传感器a3;n个上述单目摄像头a2与n个上述激光雷达测距传感器a3一一对应成对安装;
[0093]
上述下位机b的水泵启停控制端与水泵b1连接,k个上述离心雾化喷头组件b2水流
前端均安装有一个电磁阀b3,k个上述电磁阀b3与上述下位机b的电磁阀控制端排连接;上述下位机b的报警控制端排上连接有n个报警器b4,n个上述报警器b4的安装位置与上述单目摄像头a2安装位置一一对应。
[0094]
其中,k、m、n均为正整数。本实施例中,k=m=3n。
[0095]
本实施例中,粉尘浓度传感器安装在路灯或者围栏上;
[0096]
本实施例中,单目摄像头为单目深度视觉广角摄像头。
[0097]
本实施例中,上位机a为电脑,下位机b为plc控制器。
[0098]
一种基于目标检测的可实时控制喷淋系统的控制方法,参见图2,具体步骤为:
[0099]
预设定:设定人、移动加工设备和大型机械设备作为目标对象;
[0100]
步骤一:上位机a获取单目摄像头a2检测的粉尘控制区域内的实时画面图像和粉尘浓度传感器a1检测的粉尘控制区域内的粉尘浓度;并根据实时画面图像,采用目标检测yolo算法捕捉和识别目标对象,并确定目标对象的目标方位;
[0101]
步骤二:若检测到有目标对象,则上位机a控制与上述单目摄像头a2对应的激光雷达测距传感器a3测量从目标对象到对应单目摄像头a2的目标距离;
[0102]
步骤三:上位机a向下位机b发送目标信号,
[0103]
上述目标信号至少包括目标对象类型、粉尘控制区域内的粉尘浓度、目标方位、目标距离;
[0104]
步骤四:下位机b比较当前时刻的粉尘浓度与粉尘浓度阈值,若超出;进入步骤五;否则返回步骤一;
[0105]
步骤五:下位机b根据目标对象,启动喷淋和报警。
[0106]
步骤五中,若目标对象为大型机械设备,上述下位机b控制对应的报警器b4进行报警;
[0107]
若目标对象为人或者移动加工设备,上述下位机b控制对应电磁阀关闭,对应离心雾化喷头组件b2停止喷淋;
[0108]
若没有目标对象,上述下位机b控制对应电磁阀开启。
[0109]
在本实施例中,参见图3,步骤一中采用目标检测yolo算法捕捉和识别目标对象的具体步骤为:
[0110]
s11:采用主干网络模块cspdarknet53对单目摄像头a2拍摄的画面图像进行特征提取,分别得到52
×
52、26
×
26、13
×
13三个不同尺度的有效特征图;
[0111]
s12:对13
×
13大小的特征图,利用由多尺度卷积核和注意力机制构成的attention-i-f模块对其进行预处理;得到13
×
13大小的特征图的预处理图;
[0112]
s13:将52
×
52、26
×
26有效特征图和13
×
13的预处理图输入到spp模块后,再采用attention-i-f模块对输出进行处理,对不同池化窗口得到的特征进一步添加注意力,得到添加注意力的有效特征图;
[0113]
s14:将步骤s13输出的3个添加注意力的有效特征图输入到panet模块,实现3个不同尺度添加注意力的有效特征图融合,得到融合有效特征图;
[0114]
s15:将融合有效特征图输入到res-d-cbam模块,对融合效特征图中的目标检测信息进行增强或者抑制,得到特征突出有效特征图;
[0115]
s16:根据所有目标对象的特征,特征突出有效特征图进行预测,得到画面图像中
的目标对象类型。
[0116]
步骤s11中,上述主干网络模块cspdarknet53对画面图像样本进行处理时,交叉熵损失引入平衡样本因子和分类难易因子,得到最终的改进型交叉熵损失公式为:
[0117]
fl
loss
=-α
t
(1-p
t
)
γ
log(p
t
)
[0118]
α
t
为平衡样本调节权重因子;(1-p
t
)
γ
为样本难易分类调节权重因子;γ为聚焦参数,γ越大则权重降低的程度就越大;p
t
为置信度损失;p表示画面图像预测类别的概率。
[0119]
yolo算法中在定位物体时,会首先生成大量的先验框anchor box,但在实际的行人检测中,多数情况下一幅图像中仅存在少量的目标,因此会有大量的anchor box产生在背景区域.yolo算法会直接对这些正负样本不均匀的anchor box进行分类,且后续使用交叉熵计算分类损失以及置信度损失,如式(1)、式(2),其中p表示预测类别的概率.这一过程对所有类别无区别的对待,忽略了正负样本不平衡问题.
[0120]
为解决上述正负样本不平衡问题,平衡交叉熵损失在每个类别前增加了一个权重因子α
t
来协调类别不平衡,如式(3).
[0121]
ce=-log(pt)#(1)
[0122][0123]
balance
ce
=-α
t log(p
t
)#(3)
[0124]
而样本中除了正负样本之外,还存在易分类样本和难分类样本。为了提高网络的检测能力,在训练中应该对难分类的样本着重考虑,而平衡交叉熵损失中仅增加一个权重因子平衡正负样本,并没有考虑难易样本的区分。
[0125]
为解决上述难易样本的区分,焦点损失函数(focal loss,fl)在平衡交叉熵损失的基础上增加了一个调节因子(1-pt)
γ
,用来降低易分类样本权重,聚焦于难分类样本的训练.fl的表示如式(4),其中γ为聚焦参数,可以调节权重(1-pt)
γ
的降低程度,γ越大则权重降低的程度就越大。当pt很小即表示难分类的样本,此时调节因子(1-pt)
γ
趋近1,损失函数中样本的权重不受影响;当pt很大时即表示样本较容易分类,这时调节因子趋近0,该样本在损失函数中的权重下降很多,以此达到增强对难分类样本的训练。
[0126]
fl
loss
=-α
t
(1-p
t
)
γ
log(p
t
)#(4)
[0127]
在本实施例中,步骤s16中,在进行目标对象识别时,引入了适用于人脸识别的改进型focal loss的损失函数:
[0128]
loss=l
loc
+l
conf
;
[0129]
结合焦点损失函数和行人检测的特点,对损失函数进行了改进,从而提高网络的检测能力。
[0130]
其中,l
loc
为预测结果的回归损失函数:
[0131][0132]
[0133][0134][0135]
其中,s
×
s表示将输入图像划分成s
×
s的网格,s为s1或者s2或者s3;
[0136]
n表示每个网格上产生的先验框个数;
[0137]
若待检测物体的中心落在第i个网格的第j个先验框中,则待检测物体的中心落在第i个网格的第j个先验框中,则否则
[0138]ci
和分别表示预测得到的置信度和实际的置信度值;
[0139]
l
ciou
为ciou损失;
[0140]
c为真实框和预测框的最小闭包的对角线距离;
[0141]
ρ2(b,b
gt
)表示预测框和真实框中心点之间的欧氏距离
[0142]wgt
和h
gt
分别为真实框的宽和高;
[0143]
w和h分别为预测框的宽和高.v用于衡量长宽比的一致性;
[0144]
α是用于权衡的参数;
[0145]
l
conf
为预测结果的置信度损失函数,具体公式为:
[0146][0147]
β为改进的置信度损失添加了控制因子;
[0148]
(1-ci)
γ
为调节难分类样本和易分类样本的权重。
[0149]
在本实施例中,参考文献并结合实验对比,得出在实验中设置β=0.25,γ=1.8可以较好的平衡检测精度和误检率。
[0150]
验证改进的yolo算法性能,在inria行人数据集上进行了训练和测试.inria是目前使用最多的静态行人检测数据集,图像中的行人姿态和光照条件等丰富多变,存在单个行人以及拥挤遮挡人群的情况,适合用于行人检测。训练前在inria数据集上采用k均值聚类选择合适的先验框个数和尺寸大小。根据聚类个数和平均iou的曲线,实验中选择对数据集进行聚类大小为9的先验框聚类。使用python语言在pytorch框架下实现算法.将训练集中80%的图像用于训练,20%用于验证。采用adam优化器,权重衰减设置为0.000 5.学习率采用余弦退火衰减,周期t=5.初始学习率设为0.001,最小学习率0.00001,batch size=8,进行6000次迭代后,改用初始学习率0.0001,最小学习率0.000 01的余弦退火衰减继续训练。最后,训练结束,改进后的目标检测模型网络参数从6500万减少到了4000万。
[0151]
将训练后的网络在inria测试集上进行测试,获得了如图4所示的召回率-精确度曲线,其中曲线下围成的面积即为平均检测精度(ap).结合图5可以看出,为yolo算法改进
前后检测效果对比图。
[0152]
因此通过以上方法,能够更加精确和快速地进行对目标对象的检测与捕捉,进而使得喷淋控制系统出现误判的几率更低。
[0153]
目标对象状态是根据摄像头所采集到的图像中阴影部分所占比例来判断的,若相同间隔时间内,若相同间隔时间内,检测到的阴影部分面积逐渐变小,则说明对象处于远离状态,上位机对喷淋系统的中断则转变为待命模式;同理,检测到的阴影部分面积逐渐变大,则说明物体处于靠近状态,上位机中断喷淋并做出调整准备迎接下一次识别捕捉。
[0154]
如图6到图10所示,离心雾化喷头组件括自开闭阀门1和雾化喷头2,上述自开闭阀门1的出口与上述雾化喷头2的入口连通;
[0155]
上述雾化喷头2包括喷头外壳,该喷头外壳内设有内芯23,该内芯23将上述喷头外壳的内腔分隔为进水腔2a和出水腔2b,在上述内芯23上贯通有若干旋流通道23a,上述旋流通道23a的两端分别与上述进水腔2a和上述出水腔2b连通,上述进水腔2a与上述自开闭阀门1的出口连通,在上述喷头外壳上还设有雾化喷孔,该雾化喷孔将上述喷头外壳的外部与上述出水腔2b连通;
[0156]
上述喷头外壳的一部分内壁形成出水外壁,上述内芯23的一部分外壁形成出水内壁,上述出水外壁和上述出水内壁之间约束成上述出水腔2b;
[0157]
上述出水外壁包括中心线相互重合的第一圆筒段、第一弧面段和圆面段,上述第一弧面段连接在上述第一圆筒段和上述圆面段之间,上述第一圆筒段的半径为r1,上述第一弧面段的半径为r2,上述第一弧面段的弧长为πr2/2,上述圆面段的半径为r3,r2+r3=r1,上述第一圆筒段的一端与上述第一弧面段的一端相切并直线过渡连接,上述第一弧面段的另一端与上述圆面段的外边缘相切并直线过渡连接,上述圆面段的中心线垂直于其所在平面,上述雾化喷孔开设在上述圆面段的中心位置;
[0158]
上述出水内壁包括中心线相互重合的第二圆筒段、第二弧面段和锥形导出面,上述第二弧面段连接在上述第二圆筒段和上述锥形导出面之间,上述第二圆筒段的半径为r1,上述第二弧面段的半径为r2,上述第二弧面段的弧长为πr2/2,上述锥形导出面的底部圆半径为r3,r2+r3=r1,上述第二圆筒段的一端与上述第二弧面段的一端相切并直线过渡连接,上述第二弧面段的另一端与上述锥形导出面的底部圆连接,上述锥形导出面的顶部朝向上述雾化喷孔;
[0159]
上述第一圆筒段的中心线与上述第二圆筒段的中心线重合,上述第一圆筒段和上述第二圆筒段之间形成环状的直线引流腔,上述旋流通道23a与该直线引流腔连通。
[0160]
每个上述旋流通道23a分别围绕上述第二圆筒段的中心线螺旋盘设,上述旋流通道23a的入口端与上述进水腔2a连通,上述旋流通道23a的出口端向上述进水腔2a的方向螺旋盘绕的同时径向向外延伸;
[0161]
在上述内芯23上设有一圈环状的旋流引出腔23b,该旋流引出腔23b的入口端与所有上述旋流通道23a的出口端连通,上述旋流引出腔23b的出口端径向向外延伸并与上述直线引流腔对接连通。
[0162]
在上述内芯23上对应上述锥形导出面设有顶针孔23c,该顶针孔23c内活动镶设有顶针块24,上述顶针块24的伸出端端面形成上述锥形导出面,在上述顶针孔23c的底部还设有喷孔封闭弹簧25,该喷孔封闭弹簧25作用于上述顶针块24使其有靠近上述出水外壁的趋
势,上述出水腔2b内部的水压作用于上述锥形导出面,使上述顶针块24具有远离上述出水外壁的趋势。
[0163]
上述雾化喷孔包括依次连通的内侧锥孔段、中间段和外侧锥孔段,上述内侧锥孔段的大孔端与上述出水腔2b连通,上述内侧锥孔段的小孔端与上述中间段连通,上述外侧锥孔段的小口端上述中间段连通,上述外侧锥孔段的大口端与上述喷头外壳的外部连通,上述内侧锥孔段的锥度小于上述外侧锥孔段的锥度;
[0164]
上述顶针块24的锥形导出面上还设有与上述雾化喷孔相匹配的密封头29。
[0165]
上述进水腔2a呈圆柱状,上述进水腔2a的中心线与上述第二圆筒段的中心线重合,在上述进水腔2a内设有与其共中心线的筒状滤网26,上述旋流通道23a的入口端环向均匀分布在上述筒状滤网26的外侧;
[0166]
在上述喷头外壳上设有喷头入口,上述筒状滤网26的一端与上述内芯23抵靠封闭,上述筒状滤网26的另一端与上述喷头入口连通。
[0167]
上述喷头外壳包括相互扣合的前盖21和后盖22,上述内芯23的边缘密封夹设在上述前盖21和上述后盖22之间,上述前盖21的内壁形成上述出水外壁,上述后盖22的内部形成上述进水腔2a。
[0168]
上述筒状滤网26的一端固定连接有滤网固定座27,在上述内芯23上设有与上述滤网固定座27相对应的滤网固定孔,上述滤网固定座27螺纹连接在上述滤网固定孔内,上述筒状滤网26的活动端插设在所喷头入口内,上述筒状滤网26的活动端的外壁与上述喷头入口的内壁贴合并密封。
[0169]
在上述内芯23上围绕上述滤网固定孔设有一圈楔形导向环28,上述楔形导向环28的一端端面与上述内芯23连接,上述楔形导向环28的另一端厚度逐渐减小为零,上述楔形导向环28的内壁与上述滤网固定座27的外壁贴紧,上述楔形导向环28的外壁为形成环形导向斜面。
[0170]
上述自开闭阀门1包括阀门外壳,上述阀门外壳上设有阀门入口和阀门出口,在上述阀门外壳内设有两个正对的阀芯座13,两个上述阀芯座13分居于上述阀门入口和上述阀门出口的连线的两侧,上述阀芯座13滑动装配在上述阀门外壳内,两个上述阀芯座13在滑动时相互靠近或远离,上述阀门出口与上述喷头入口连通;
[0171]
两个上述阀芯座13的正面相互靠近,两个上述阀芯座13的背面相互远离,上述阀芯座13的正面包括依次连接的受压斜面、封闭平面和泄压斜面,两个上述阀芯座13的封闭平面相互靠近并贴合抵紧,上述受压斜面分别靠近并朝向上述阀门入口,上述泄压斜面分别靠近并朝向上述阀门出口,两个上述阀芯座13之间形成可调节流道,两个上述阀芯座13与上述阀门外壳之间形成芯座调节腔,上述芯座调节腔与上述可调节流道之间通过对应的上述阀芯座13隔断;在上述阀芯座13的背面分别连接有阀芯弹簧14,上述阀芯弹簧14与上述阀门外壳的内壁连接抵紧;
[0172]
两个上述阀芯座13的受压斜面之间形成喇叭状的受压腔,两个上述阀芯座13的封闭平面之间形成节流腔,两个上述阀芯座13的泄压斜面之间形成喇叭状的泄压腔,上述受压腔的大口端与上述阀门入口保持连通,上述泄压腔的大口端与上述阀门出口保持连通。当进水水压对阀芯座13的作用力小于阀芯弹簧14对阀芯座13的作用力时,两个阀芯座13相互靠近并使得其封闭平面接触贴紧,此时上述节流腔消失、体积为零;而当进水水压对阀芯
座13的作用力大于阀芯弹簧14对阀芯座13的作用力时,两个阀芯座13相互远离,节流腔重新出现,上述受压腔的小口端、以及上述泄压腔的小口端分别与上述节流腔连通。
[0173]
上述旋流通道23a为圆形通道,上述旋流通道23a的半径为r
t
;
[0174]r1-r1≤r
t
≤1.5*r
1-r1。
[0175]
测定实施例1的旋流喷头在不同工作压力0.1-0.5mpa下雾化后液滴的粒径、射程,取算数平均值进行比较。作为对比,设置有两款对比喷头,在相同工作压力下进行相同测试;对比喷头1与实施例1中的旋流喷头的主要区别是:旋流通道出口侧的出水腔呈半球状,如图11所示。对比喷头2与对比喷头1的主要区别是:对比喷头2中的旋流通道在轴向螺旋盘绕时,距其中心线的径向距离相等,如图12所示。
[0176]
测得三款喷头的粒径分布结果如图13所示,从图13可以看出:采用实施例1提供的旋流喷头雾化后液滴的粒径更小且分布更为集中。
[0177]
测得旋流喷头的射程均值相较于对比喷头1提高了约11%,相较于对比喷头2提高了约17%。
[0178]
上仅是本发明优选的实施方式,需指出的是,对于本领域技术人员在不脱离本技术方案的前提下,作出的若干变形和改进的技术方案应同样视为落入本权利要求书要求保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1