一种应用于化工企业的无人驾驶安防巡检防爆机器人的制作方法
1.本发明涉及机器人技术领域,特别是一种应用于化工企业的无人驾驶安防巡检防爆机器人。
背景技术:
2.现如今在化工企业中,通常需要巡检人员深入工作区域进行检测,巡检区域范围大,人员巡检的强度及工作量大,人员的劳动负荷已经到达一定的极限,很难做到持续全面准确的巡检,给化工设备生产运行的体系带来隐患,也给巡检人员的安全带来隐患,并且有些巡检设备仅具有检测的功能,不具有处理状况的功能,若气体发生泄漏,维护人员来到现场会吸入浓度较大的泄漏气体,对维护人员的安全带来隐患,鉴于此,针对上述问题深入研究,遂有本案产生。
技术实现要素:
3.本发明的目的是为了解决上述问题,设计了一种应用于化工企业的无人驾驶安防巡检防爆机器人,解决了现如今在化工企业中,通常需要巡检人员深入工作区域进行检测,巡检区域范围大,人员巡检的强度及工作量大,人员的劳动负荷已经到达一定的极限,很难做到持续全面准确的巡检,给化工设备生产运行的体系带来隐患,也给巡检人员的安全带来隐患,并且有些巡检设备仅具有检测的功能,不具有处理状况的功能,若气体发生泄漏,维护人员来到现场会吸入浓度较大的泄漏气体,对维护人员的安全带来隐患的问题。
4.实现上述目的本发明的技术方案为:一种应用于化工企业的无人驾驶安防巡检防爆机器人,包括安装横板、固定套以及吸入管,所述固定套安装于安装横板一端,所述吸入管插装于固定套上,所述吸入管一端设有防爆结构,所述安装横板上设有阻挡结构;
5.所述防爆结构包括:辅吸部、气泵、吸入罩、两个第一挡网、干燥棉、加湿部、处理部以及驱动部;
6.所述辅吸部安装于吸入管一端,所述气泵安装于辅吸部上,所述吸入罩安装于气泵一端,两个所述第一挡网安装于吸入罩内侧壁面上,所述干燥棉安装于吸入罩内侧壁面,且所述干燥棉位于两个所述第一挡网中间部位,所述加湿部安装于吸入罩上,所述处理部安装于吸入管一端,所述驱动部安装于处理部上;
7.所述加湿部包括:两个第二挡网、加湿棉、水箱、水泵以及水管;
8.两个所述第二挡网安装于吸入罩内侧壁面上,所述加湿棉安装于吸入罩内侧壁面,且所述干燥棉位于两个所述第二挡网中间部位,所述水箱安装于吸入罩上壁面上,所述水泵安装于水箱上,所述水管一端安装于水泵上,所述水管另一端插装于吸入罩上、且所述水管另一端对应于加湿棉;
9.所述辅吸部包括:辅吸箱、安装架、第一转轴、第一扇叶、第一锥形齿轮、第二转轴、第二锥形齿轮、第三锥形齿轮、安装箱、单向轴承、第三转轴、第四锥形齿轮以及第二扇叶;
10.所述辅吸箱安装于吸入管一端,所述安装架安装于辅吸箱内侧壁面上,所述第一
转轴活动插装于安装架上,所述第一扇叶套装于第一转轴一端,所述第一锥形齿轮套装于第一转轴另一端,所述第二转轴活动插装于辅吸箱上,所述第二锥形齿轮与第一锥形齿轮相互啮合的套装于第二转轴一端,所述第三锥形齿轮套装于第二转轴另一端,所述安装箱安装于辅吸箱上,所述单向轴承安装于安装箱上,所述第三转轴插装于单向轴承上,所述第四锥形齿轮与第三锥形齿轮相互啮合的套装于第三转轴一端,所述第二扇叶套装于第三转轴另一端。
11.优选的,所述第二扇叶位于吸入罩开口处,所述水箱上设有支架,所述第三转轴活动插装于支架上,所述第四锥形齿轮的尺寸大于第三锥形齿轮的尺寸。
12.优选的,所述处理部包括:处理箱、隔板、通气管、排气管、两个加液口、两个排液口以及混合组件;
13.所述处理箱安装于吸入管一端,所述隔板安装于处理箱内侧壁面上,所述通气管插装于隔板上,所述排气管插装于处理箱上,两个所述加液口设置于处理箱侧壁面上,两个所述排液口设置于处理箱下壁面上,所述混合组件安装于处理箱上。
14.优选的,所述混合组件包括:两个第一电机以及两个叶轮;
15.两个所述第一电机安装于处理箱侧壁面上,两个所述第一电机的驱动端活动插装于处理箱侧壁面上,两个所述叶轮分别安装于两个所述第一电机驱动端上。
16.优选的,所述处理箱与安装横板之间设有支撑杆。
17.优选的,所述阻挡结构包括:固定板、两个固定架、两个第一双向伸缩电动推杆、两个移动板以及检测部;
18.所述固定板安装于安装横板上,两个所述固定架安装于固定板侧壁面上,两个所述第一双向伸缩电动推杆分别安装于两个所述固定架上,两个所述移动板安装于两个所述第一双向伸缩电动推杆伸缩端,所述检测部安装于安装横板上。
19.优选的,所述固定板上设有两个密封条,两个所述密封条分别活动贴合两个所述移动板。
20.优选的,所述检测部包括:第一气缸、第二双向伸缩电动推杆以及两个气体传感器;
21.所述第一气缸安装于安装横板上壁面上,所述第二双向伸缩电动推杆安装于第一气缸伸缩端上,两个所述气体传感器分别安装于第二双向伸缩电动推杆伸缩端上。
22.优选的,所述驱动部包括:电动转盘、蓄电池、机器人底盘以及移动组件;
23.所述电动转盘安装于处理箱下壁面上,所述蓄电池安装于电动转盘下壁面上,所述机器人底盘安装于蓄电池下壁面上,所述移动部安装于机器人底盘下壁面上。
24.优选的,所述移动组件包括:四个第二电机以及四个麦克纳母轮;
25.四个所述第二电机安装于机器人底盘上,四个所述麦克纳母轮分别安装于四个所述第二电机驱动端上。
26.利用本发明的技术方案制作的应用于化工企业的无人驾驶安防巡检防爆机器人,驱动部自动带动装置移动,无需巡检人员人工检测,提高巡检人员的安全系数,在装置移动中,检测部检测到化工设备气体泄漏,阻挡结构工作,固定板与两个移动板的外观面积增大,减小了泄漏位置的敞开空间,对泄漏位置进行遮挡,与此同时阻挡结构另一侧的防爆结构将泄漏出的气体进行一定程度的吸收处理,减小空间中泄漏的气体浓度值,避免前来维
护的工作人员吸入浓度较高的气体,提高安全系数,避免前来维护的工作人员吸入浓度较高的气体,同时进行防爆,提高安全系数。
附图说明
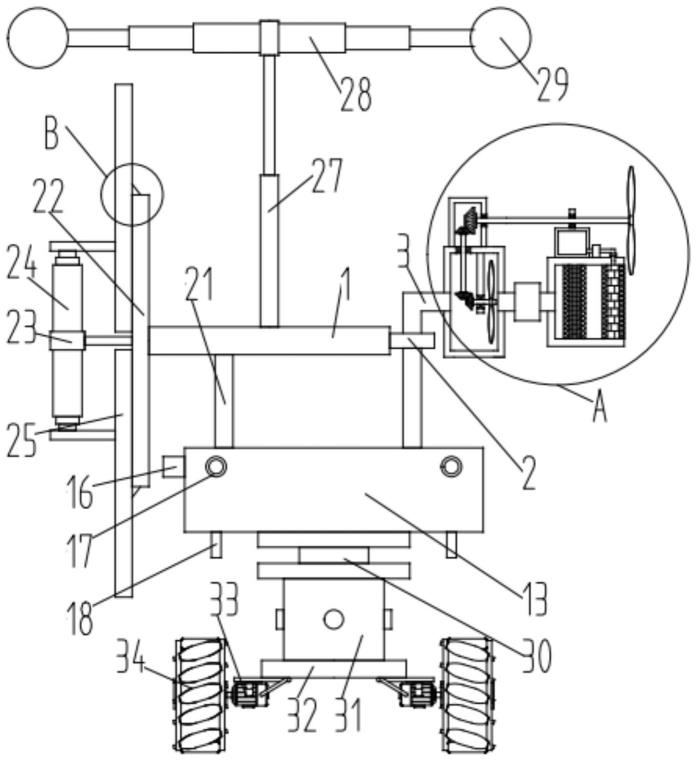
27.图1为本发明所述一种应用于化工企业的无人驾驶安防巡检防爆机器人的主视结构示意图。
28.图2为本发明所述一种应用于化工企业的无人驾驶安防巡检防爆机器人的侧视剖视结构示意图。
29.图3为本发明所述一种应用于化工企业的无人驾驶安防巡检防爆机器人的处理部的俯视剖视结构示意图。
30.图4为本发明所述一种应用于化工企业的无人驾驶安防巡检防爆机器人的处理部的后视结构示意图。
31.图5为本发明所述一种应用于化工企业的无人驾驶安防巡检防爆机器人的阻挡结构的工作状态下的结构示意图。
32.图6为本发明图1所述一种应用于化工企业的无人驾驶安防巡检防爆机器人的a处局部放大图。
33.图7为本发明图1所述一种应用于化工企业的无人驾驶安防巡检防爆机器人的b处局部放大图。
34.图8为本发明图2所述一种应用于化工企业的无人驾驶安防巡检防爆机器人的c处局部放大图。
35.图中:1、安装横板,2、固定套,3、吸入管,4、吸入罩,5、第一挡网,6、干燥棉,7、第二挡网,8、加湿棉,9、水箱,10、水泵,11、水管,12、气泵,13、处理箱,14、隔板,15、通气管,16、排气管,17、加液口,18、排液口,19、第一电机,20、叶轮,21、支撑杆,22、固定板,23、固定架,24、第一双向伸缩电动推杆,25、移动板,26、密封条,27、第一气缸,28、第二双向伸缩电动推杆,29、气体传感器,30、电动转盘,31、控制盒,32、机器人底盘,33、第二电机,34、麦克纳母轮,35、辅吸箱,36、安装架,37、第一转轴,38、第一扇叶,39、第一锥形齿轮,40、第二转轴,41、第二锥形齿轮,42、第三锥形齿轮,43、安装箱,44、单向轴承,45、第三转轴,46、第四锥形齿轮,47、第二扇叶,48、支架。
具体实施方式
36.下面结合附图对本发明进行具体描述,如图1-8所示,一种应用于化工企业的无人驾驶安防巡检防爆机器人。
37.通过本领域人员,将本案中所有电气件与其适配的电源通过导线进行连接,并且应该根据实际情况,选择合适的控制器,以满足控制需求,具体连接以及控制顺序,应参考下述工作原理中,各电气件之间先后工作顺序完成电性连接,其详细连接手段,为本领域公知技术,下述主要介绍工作原理以及过程,不在对电气控制做说明。
38.实施例:
39.一种应用于化工企业的无人驾驶安防巡检防爆机器人,包括安装横板1、固定套2以及吸入管3,固定套2安装于安装横板1一端,吸入管3插装于固定套2上,吸入管3一端设有
防爆结构,安装横板1上设有阻挡结构;
40.在具体实施过程中,防爆结构可优选采用以下结构,其包括:辅吸部、气泵12、吸入罩4、两个第一挡网5、干燥棉6、加湿部、处理部以及驱动部;辅吸部安装于吸入管3一端,气泵12安装于辅吸部上,吸入罩4安装于气泵12一端,两个第一挡网5安装于吸入罩4内侧壁面上,干燥棉6安装于吸入罩4内侧壁面,且干燥棉6位于两个第一挡网5中间部位,加湿部安装于吸入罩4上,处理部安装于吸入管3一端,驱动部安装于处理部上;
41.其中需要说明的是:安装横板1用于安装固定套2以及吸入管3,,防爆结构中的驱动部用于使装置自动,检测部检测到化工设备气体泄漏,阻挡结构工作,减小泄漏位置的敞开空间,与此同时防爆结构中的处理部将阻挡结构另一侧的泄漏出的气体进行吸收处理,减小空间的泄漏气体浓度,提高安全系数,防爆结构中的辅吸部提高了气体吸入的效率,无需巡检人员人工检测,提高巡检人员的安全系数;
42.在具体实施过程中,加湿部可优选采用以下结构,其包括:两个第二挡网7、加湿棉8、水箱9、水泵10以及水管11;两个第二挡网7安装于吸入罩4内侧壁面上,加湿棉8安装于吸入罩4内侧壁面,且干燥棉6位于两个第二挡网7中间部位,水箱9安装于吸入罩4上壁面上,水泵10安装于水箱9上,水管11一端安装于水泵10上,水管11另一端插装于吸入罩4上、且水管11另一端对应于加湿棉8;
43.其中需要说明的是:气泵12工作,将气体通过吸入管3吸入到吸入罩4中,水泵10工作,水箱9中的水通过水管11进入加湿棉8,使加湿棉8湿润,对吸入的气体进行除尘,避免灰尘堆积在部件中,干燥棉6对潮湿的气体进行干燥,避免气泵12受损;
44.在具体实施过程中,辅吸部可优选采用以下结构,其包括:辅吸部包括:辅吸箱35、安装架36、第一转轴37、第一扇叶38、第一锥形齿轮39、第二转轴40、第二锥形齿轮41、第三锥形齿轮42、安装箱43、单向轴承44、第三转轴45、第四锥形齿轮46以及第二扇叶47;辅吸箱35安装于吸入管3一端,安装架36安装于辅吸箱35内侧壁面上,第一转轴37活动插装于安装架36上,第一扇叶38套装于第一转轴37一端,第一锥形齿轮39套装于第一转轴37另一端,第二转轴40活动插装于辅吸箱35上,第二锥形齿轮41与第一锥形齿轮39相互啮合的套装于第二转轴40一端,第三锥形齿轮42套装于第二转轴40另一端,安装箱43安装于辅吸箱35上,单向轴承44安装于安装箱43上,第三转轴45插装于单向轴承44上,第四锥形齿轮46与第三锥形齿轮42相互啮合的套装于第三转轴45一端,第二扇叶47套装于第三转轴45另一端;
45.其中需要说明的是:气泵12工作时,吸入罩4开口处气体流动,带动第二扇叶47转动,第三转轴45转动,第四锥形齿轮46因此带动第三锥形齿轮42转动,第二锥形齿轮41因此带动第一锥形齿轮39转动,第一扇叶38因此转动,第一扇叶38将吸入罩4中过滤的气体吸入辅吸箱35中,在单向轴承44的作用下,第一扇叶38的转动方向只能是吸入气体的方向,加快气体流速,提高效率;
46.作为优选的,更进一步的,第二扇叶47位于吸入罩4开口处,水箱9上设有支架48,第三转轴45活动插装于支架48上,第四锥形齿轮46的尺寸大于第三锥形齿轮42的尺寸;
47.在具体实施过程中,处理部可优选采用以下结构,其包括:处理箱13、隔板14、通气管15、排气管16、两个加液口17、两个排液口18以及混合组件;处理箱13安装于吸入管3一端,隔板14安装于处理箱13内侧壁面上,通气管15插装于隔板14上,排气管16插装于处理箱13上,两个加液口17设置于处理箱13侧壁面上,两个排液口18设置于处理箱13下壁面上,混
合组件安装于处理箱13上。
48.其中需要说明的是:处理箱13中、隔板14的两侧装有用于与泄漏气体反应的药液,泄漏的气体进入处理箱13中,经过一种药液,再通过通气管15进入另一种药液,得到安全气体,两种药液的选择根据泄露气体的成分进行添加,安全气体通过排气管16排出处理箱13,两个加液口17用于对药液进行添加,两个排液口18用于排出药液;
49.在具体实施过程中,混合组件可优选采用以下结构,其包括:两个第一电机19以及两个叶轮20;两个第一电机19安装于处理箱13侧壁面上,两个第一电机19的驱动端活动插装于处理箱13侧壁面上,两个叶轮20分别安装于两个第一电机19驱动端上;
50.其中需要说明的是:两个第一电机19工作,带动两个叶轮20转动,使气体与药液充分混合;
51.作为优选的,更进一步的,处理箱13与安装横板1之间设有支撑杆21。
52.在具体实施过程中,阻挡结构可优选采用以下结构,其包括:固定板22、两个固定架23、两个第一双向伸缩电动推杆24、两个移动板25以及检测部;固定板22安装于安装横板1上,两个固定架23安装于固定板22侧壁面上,两个第一双向伸缩电动推杆24分别安装于两个固定架23上,两个移动板25安装于两个第一双向伸缩电动推杆24伸缩端,检测部安装于安装横板1上;
53.其中需要说明的是:两个第一双向伸缩电动推杆24工作,带动两个移动板25相互远离,固定板22与两个移动板25的外观面积增大,减小了泄漏位置的敞开空间,对泄漏位置进行遮挡;
54.作为优选的,更进一步的,固定板22上设有两个密封条26,两个密封条26分别活动贴合两个移动板25;
55.其中需要说明的是:两个密封条26用于对固定板22与两个移动板25之间的缝隙进行遮挡;
56.在具体实施过程中,检测部可优选采用以下结构,其包括:第一气缸27、第二双向伸缩电动推杆28以及两个气体传感器29;第一气缸27安装于安装横板1上壁面上,第二双向伸缩电动推杆28安装于第一气缸27伸缩端上,两个气体传感器29分别安装于第二双向伸缩电动推杆28伸缩端上;
57.其中需要说明的是:第一气缸27伸缩,对两个气体传感器29的高度进行调节,第二双向伸缩电动推杆28伸长,对两处位置进行气体检测,当检测到有气体泄漏时,第二双向伸缩电动推杆28收缩,通过控制器控制两个第一双向伸缩电动推杆24工作,以及控制水泵10与气泵12工作;
58.在具体实施过程中,驱动部可优选采用以下结构,其包括:电动转盘30、控制盒、机器人底盘32以及移动组件;电动转盘30安装于处理箱13下壁面上,控制盒安装于电动转盘30下壁面上,机器人底盘32安装于控制盒下壁面上,移动组件安装于机器人底盘32下壁面上,控制盒上设有若干个避障传感器;
59.其中需要说明的是:控制盒中存储有运行路线,机器人底盘32用于安装移动部,当两个气体传感器29检测到有气体发生泄漏,两个气体传感器29检测值之间有差值,电动转盘30工作,使固定板22与两个移动板25转动至两个气体传感器29中检测值较大的一侧;
60.在具体实施过程中,移动组件可优选采用以下结构,其包括:四个第二电机33以及
四个麦克纳母轮;四个第二电机33安装于机器人底盘32上,四个麦克纳母轮分别安装于四个第二电机33驱动端上;
61.其中需要说明的是:四个第二电机33工作,带动四个麦克纳母轮工作,使装置移动。
62.上述技术方案仅体现了本发明技术方案的优选技术方案,本技术领域的技术人员对其中某些部分所可能做出的一些变动均体现了本发明的原理,属于本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1