一种篮球外壳线条自动描线方法与流程
一种篮球外壳线条自动描线方法
1.技术领域
2.本发明涉及篮球加工技术领域,尤其涉及一种篮球外壳线条自动描线方法。
3.
背景技术:
4.在篮球外壳热压成型后,先对篮球补气使保持饱满,后将黑色橡胶涂在压花时形成的凹槽上,目前一般采用人工一手转动篮球,另一手握住沾有黑色液态橡胶的画笔在凹槽上描画条纹,这种描画条纹的作业方式效率低,工人劳动强度大,无法满足篮球自动化生产需求。
5.
技术实现要素:
6.本发明的目的是针对现有的技术存在的上述问题,提供一种篮球外壳线条自动描线装置,本发明所要解决的技术问题是如何自动并快速描画出篮球外壳的条纹。
7.本发明的目的可通过下列技术方案来实现:一种篮球外壳线条自动描线方法,包括如下步骤:二次定位:定位机构上的第二夹紧旋转机构的第一气缸和第二气缸分别驱动第一夹爪和第二夹爪夹紧篮球,系统根据相机拍摄篮球位置状态对比分析控制伺服电机驱动第一夹爪和第一气缸带动篮球旋转到合适角度;描曲线:曲线槽描线机构上的第一滚珠丝杆电机驱动第九安装座下降并通过第十安装座和第十一安装座带动第一画笔同步下降,使两支第一画笔笔尖触及在篮球曲线槽上,此时下方旋转机构上的第一夹紧旋转机构的伺服电机开始配合动作,将篮球夹持住并顺时针缓慢旋转,同时第二滚珠丝杆电机开始带动两个连杆向下运动,使得两支第一画笔角度发生变化,与此同时,正反牙双滑块直线模组带动两个第十一安装座向外背向同距同速移动,整个动作过程中,两支第一画笔与篮球表面接近垂直角度,待第一画笔描线至篮球曲线槽最远点处,正反牙双滑块直线模组开始反转,同时第一滚珠丝杆电机和第二滚珠丝杆电机同时向上移动,进行反向描线,如此四次即可完整描出篮球曲线,曲线槽描画完后,第一滚珠丝杆电机驱动第九安装座上升并通过第十安装座和第十一安装座带动第一画笔同步上升,下方第一夹紧旋转机构的伺服电机驱动被夹紧篮球继续旋转,使篮球完成360
°
旋转并恢复到描线前位置;描环形线:环形槽描线机构上的第六气缸活塞杆伸出驱动第二画笔接触到篮球的第一环形槽,下方旋转机构上的第一夹紧旋转机构上的伺服电机驱动篮球旋转360
°
,完成第一环形槽描线,第五气缸活塞杆伸出驱动第三夹紧旋转机构下降,第三夹紧旋转机构上第一气缸和第二气缸的活塞杆部伸出使第一夹爪和第二夹爪夹紧篮球,下方的第一夹紧旋转机构上第一气缸和第二气缸的活塞杆部缩回使第一夹爪和第二夹爪松开篮球,第三夹紧
旋转机构上的伺服电机驱动篮球旋转360
°
,完成第二环形槽描线,第六气缸活塞杆缩回驱动第二画笔上升复位,下方的第一夹紧旋转机构上第一气缸和第二气缸的活塞杆部伸出使第一夹爪和第二夹爪夹紧篮球,第三夹紧旋转机构上第一气缸和第二气缸的活塞杆部缩回使第一夹爪和第二夹爪松开篮球,第五气缸活塞杆缩回驱动第三夹紧旋转机构上升复位;接料:接料机构上的第七气缸活塞杆伸出使移动架伸出并插入附近转盘上的第一夹紧旋转机构内,附近第一夹紧旋转机构上的第一气缸和第二气缸的活塞杆部缩回使第一夹爪和第二夹爪松开篮球,篮球落入移动架上并沿移动架滚到固定架上,第七气缸活塞杆缩回使移动架回缩。
8.进一步的,在篮球旋转定位前,还包括一次定位,一次定位:人工将待描线篮球的气嘴对准定位针正下方后手握篮球上升使定位针插入到气嘴内。
9.进一步的,在篮球二次定位后,还包括物料转移,物料转移:转移机构上的第二直线模组驱动第四气缸下降,第四气缸活塞杆部的第三夹爪夹紧篮球,第二直线模组驱动被夹紧篮球上升,第一直线模组驱动被夹紧篮球向后平移到位,第二直线模组驱动被夹篮球下降到下方固定在转盘上的第一夹紧旋转机构内, 的第一气缸和第二气缸分别驱动第一夹爪和第二夹爪夹紧篮球,第四气缸活塞杆缩回使第三夹爪松开篮球后转移机构复位。
10.进一步的,在描曲线、描环形线和接料前,均还包括转料,转料:旋转机构上的中空旋转平台驱动转盘及固定在转盘上第一夹紧旋转机构夹紧篮球旋转逆时针旋转90
°
,使被夹紧篮球从上一工位旋转到当前工位。
11.进一步的,在接料后,还包括空转复位,空转复位:旋转机构上的中空旋转平台逆时针旋转90
°
使无篮球的第一夹紧旋转装置旋转到靠近转移机构一侧。
12.与现有技术相比,本发明的有益效果在于:人工上料进行一次定位后通过篮球旋转二次定位,定位好的篮球被转移到旋转机构上的第一夹紧旋转机构内、旋转机构再将定位好的篮球先后旋转到曲线槽描线机构和环形槽描线机构正下方分别进行描曲线和描两条环形线,旋转机构将描好线篮球旋转到接料机构附近进行接球下料,下料后的第一夹紧旋转机构被旋转机构旋转到下一工位等待定位好的篮球上料,实现篮球外壳自动化描线,极大降低了工人劳动强度;曲线槽描线机构采用两支第一画笔同时描线,提高了曲线槽描线效率。
13.附图说明
14.图1、图2分别是本发明实施例提供用于篮球外壳线条自动描线装置不同视角下的立体结构示意图。
15.图3、图4分别是本发明实施例提供用于篮球外壳线条自动描线装置的旋转机构的不同视角下的立体结构示意图。
16.图5是图4中的第一夹紧旋转机构的初始状态的立体结构示意图。
17.图6是图4中的第一夹紧旋转机构的待夹篮球状态下的立体结构示意图。
18.图7是图4中的第一夹紧旋转机构的篮球夹紧状态下的立体结构示意图。
19.图8是本发明实施例提供用于篮球外壳线条自动描线装置的定位机构的立体结构示意图。
20.图9是本发明实施例提供用于篮球外壳线条自动描线装置的视觉定位组件的立体结构示意图。
21.图10是本发明实施例提供用于篮球外壳线条自动描线装置的转移机构的立体结构示意图。
22.图11是本发明实施例提供用于篮球外壳线条自动描线装置的曲线槽描线机构的初始状态的立体结构示意图。
23.图12是本发明实施例提供用于篮球外壳线条自动描线装置的曲线槽描线机构的第一画笔最大张角状态的立体结构示意图。
24.图13是本发明实施例提供用于篮球外壳线条自动描线装置的曲线槽描线机构的初始描线状态的立体结构示意图。
25.图14是本发明实施例提供用于篮球外壳线条自动描线装置的曲线槽描线机构的篮球曲线槽最远点处描线状态的立体结构示意图。
26.图15、图16分别是本装置的环形槽描线机构的不同视角下的立体结构示意图。
27.图17是本发明实施例提供用于篮球外壳线条自动描线装置的接料机构的初始状态的立体结构示意图。
28.图18是本发明实施例提供用于篮球外壳线条自动描线装置的接料机构的移动架伸出状态的立体结构示意图。
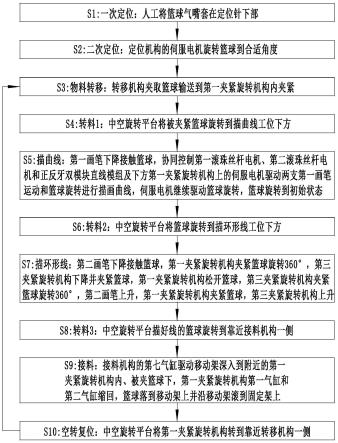
29.图19是本发明实施例步骤流程图。
30.图中,100、机架;101、台面板;1011、矩形缺口;200、旋转机构;201、第一安装座;202、中空旋转平台;203、转盘;2040、第一夹紧旋转机构;2041、第二安装座;2042、第一气缸;2043、第二气缸;2044、第一滑动安装座;2045、第二滑动安装座;2046、伺服电机;2047、联轴器;2048、第一夹爪;2049、第二夹爪;30、定位机构;310、第二夹紧旋转机构;3110、安装组件;3111、第三安装座;3112、第四安装座;3113、第一安装架;32、第五安装座;33、第三气缸;34、定位针;400、视觉定位组件;401、第六安装座;402、第一微调平台;403、第七安装座;404、第二微调平台;405、光源;406、第八安装座;407、相机;408、镜头;500、转移机构;501、第二安装架;5020、两轴移动单元;5021、第一直线模组;5022、第三安装架;5023、第二直线模组;5024、第四安装架;503、第四气缸;504、第三夹爪;600、曲线槽描线机构;601、第五安装架;602、第一滚珠丝杆电机;603、第九安装座;604、第二滚珠丝杆电机;605、第三滑动安装座;606、正反牙双滑块直线模组;607、连接板;608、连杆;609、第十安装座;610、第十一安装座;6101、弧形槽;611、第一转轴;612、第二转轴;6121、滚轮;613、第一画笔;700、环形槽描线机构;701、第六安装架;702、第五气缸;703、第四滑动安装座;704、第六气缸;705、第十二安装座;706、第二画笔;7070、第二夹紧旋转机构;7071、第十三安装座;800、接料机构;801、固定架;802、移动架;803、第七气缸;
900、篮球;901、气嘴;902、第一环形槽;903、第二环形槽;904、曲线槽。
31.具体实施方式
32.以下是本发明的具体实施例并结合附图,对本发明的技术方案作进一步的描述,但本发明并不限于这些实施例。
33.如图1~2所示,包括机架100、固定在机架100中部的旋转机构200、固定在机架100右上前方的定位机构30和视觉定位组件400、按右后左前顺序依次固定在机架100四周上的转移机构500和曲线槽描线机构600和环形槽描线机构700及接料机构800,机架100包括一固定的台面板101,用于安装各功能机构或组件,台面板101一侧设有一矩形缺口1011,便于人工坐着上料。
34.如图3~4所示,旋转机构200包括固定在机架100中部上方的第一安装座201、固定在第一安装座201上的中空旋转平台202、固定在中空旋转平台202上的转盘203、固定在转盘203四周上的四个第一夹紧旋转机构2040,中空旋转平台202用于驱动转盘203上的四个第一夹紧旋转机构2040进行90
°
旋转。如图8所示,定位机构30包括固定在机架100上的第二夹紧旋转机构310、固定紧旋转机构310上的第五安装座32、固定在第五安装座32上的第三气缸33、固定在第三气缸33活塞杆部的定位针34,定位针34随第三气缸33活塞杆部伸出便于人工将篮球气嘴插入;第三气缸33活塞杆部缩回便于篮球定位后抽出定位针34,另外第一夹紧旋转机构2040可夹紧篮球900并旋转至任一角度。
35.如图9所示,视觉定位组件400包括固定在面板101上的第六安装座401、固定在第六安装座401侧面上的第一微调平台402、固定在第一微调平台402活动板上的第七安装座403、固定在第七安装座403上的第二微调平台404和光源405、固定在第二微调平台404活动板上的第八安装座406、固定在第八安装座406上的相机407、与相机407螺纹连接的镜头408,镜头408前端固定在第七安装座403上,第一微调平台402用于微调相机407的上下位移,第二微调平台404用于微调相机407及镜头408的前后位移,视觉定位组件400用于拍摄定位机构30上篮球900状态并反馈到计算机系统进行分析运算,然后控制定位机构30上伺服电机2046驱动第一夹爪2048带动篮球900旋转到合适角度从而摆正篮球900的曲线位置。
36.如图10所示,转移机构500包括第二安装架501、固定在第二安装架501上的两轴移动单元5020、固定在两轴移动单元5020上的两个第四气缸503、固定在第四气缸503活塞杆部的第三夹爪504,两个第三夹爪(504)同轴,两轴移动单元5020包括第一直线模组5021、固定在第一直线模组5021移动板上且与第二安装架501滑动连接的第三安装架5022、垂直固定在第三安装架5022的第二直线模组5023、固定在第二直线模组5023移动板上的第四安装架5024,两轴移动单元5020具有水平移动和垂直移动功能,转移机构500用于将定位后的篮球900夹紧并移动到靠近转移机构500一侧的第一夹紧旋转机构2040上。
37.如图11~12所示,曲线槽描线机构600包括固定在台面板101上的第五安装架601、垂直固定在第五安装架601上前方的第一滚珠丝杆电机602、固定在第一滚珠丝杆电机602的丝母安装座上的第九安装板603、垂直固定在第九安装板603上前方的第二滚珠丝杆电机604、垂直滑动连接在第九安装板603上的第三滑动安装座605、水平固定在第九安装板603下前方的正反牙双滑块直线模组606、固定连接第二滚珠丝杆电机604的丝母座和第三滑动
安装座605的连接板607、转动连接在第三滑动安装座605前下方的两个连杆608、固定在正反牙双滑块直线模组606的滑块上的两个第十安装座609、固定在第十安装座609上的第十一安装座610,转动连接在第十一安装座610的第一转轴611、转动连接在连杆608另一端的第二转轴612、固定在第二转轴612另一端的第一画笔613,第一画笔613中部固定在第二转轴612上,第十一安装座610设有一贯穿的弧形槽6101,第二转轴612中部设有一滚轮6121,第二转轴612贯穿第十一安装座610,滚轮6121设置在弧形槽6101内,第一滚珠丝杆电机602用于驱动两支第一画笔6013上下移动,第二滚珠丝杆电机604用于控制两支第一画笔6013的倾角,使第一画笔6013尽量垂直篮球900上的曲线槽904,使所描曲线线条尽量均匀。
38.如图15~16所示,环形槽描线机构700包括固定在台面板101上的第六安装架701,固定在第六安装架701上方内腔一侧的第五气缸702、滑动连接在第六安装架701上方内腔的两个第四滑动安装座703、固定在第六安装架701上方内腔另一侧的第六气缸704、固定在第六气缸704活塞杆部上的第十二安装座705、中部固定在第十二安装座705上的第二画笔706、固定在两个第四滑动安装座703下部的第三夹紧旋转机构7070,第五气缸702活塞杆部固定在第三夹紧旋转机构7070上,第五气缸702用于驱动第三夹紧旋转机构7070上升或下降,第六气缸704用于驱动第二画笔706上升或下降。
39.第三夹紧旋转机构7070与第一夹紧旋转机构2040及第二夹紧旋转机构310功能相同,用于夹紧和旋转篮球900,如图5~7所示,均包括安装座、固定在安装座上方两侧的第一气缸2042和第二气缸2043、滑动连接在安装座上的第一滑动安装座2044和第二滑动安装座2045、固定在第一滑动安装座2044上的伺服电机2046、固定在伺服电机2046输出轴上的联轴器2047、转动连接在第一滑动安装座2044上的第一夹爪2048、转动连接在第二滑动安装座2045上的第二夹爪2049,第一夹爪2048的轴端固定在联轴器2047内,第一夹爪2048与第二夹爪2049同轴。结构区别在于,如图8所示,第二夹紧旋转机构310上的第四夹爪2049轴心被定位针34贯穿;如图15~16所示,第三夹紧旋转机构7070的安装座即第十三安装座7071被第二画笔706贯穿;如图8所示,第二夹紧旋转机构310的安装座为安装组件3110,安装组件3110包括固定在台面板101下第三安装座3111和两个第四安装座3112以及固定在台面板101上的第一安装架3113,第一气缸2042固定在第三安装座3111上,第二气缸2043固定在第一安装架3113,第一滑动安装座2044滑动连接在第四安装座3112上,第二滑动安装座2045滑动连接在第一安装架3113上。
40.如图17~18所示,接料机构800包括固定在台面板101上的固定架801、与固定架801滑动连接的移动架802、摆动连接在固定在台面板101上的的第七气缸803,第七气缸803活塞杆部连接移动架802下部,第七气缸803活塞杆部伸出驱动移动架802插入到附近的第一夹紧旋转机构2040内,用于接描好线的篮球900下料。
41.如图19所示,步骤流程图包括一次定位、二次定位、物料转移、转料1、描曲线、转料2、描环形线、转料3、接料和空转复位,具体如下:使用前,除第三气缸33活塞杆部处于伸出状态,其余气缸活塞杆均处于缩回状态,使用时具体如下:s1:一次定位:人工将待描线篮球900的气嘴901对准定位针34正下方后手握篮球900上升使定位针34插入到气嘴901内。
42.s2:二次定位:第二夹紧旋转机构310上的第一气缸2042和第二气缸2043的活塞杆
部伸出使第一夹爪2048和第二夹爪夹2049紧篮球900,第三气缸33活塞杆部缩回,定位针34被抽出篮球900气嘴901,视觉定位组件400通过相机407拍摄此时篮球900位置状态并反馈到计算机系统,计算机系统经过运算并控制第二夹紧旋转机构310上的伺服电机2046使篮球900旋转到合适角度。
43.s3:物料转移:转移机构500上的第二直线模组5023驱动第三夹爪504下降到篮球900定位处,第四气缸503驱动第三夹爪504夹紧篮球900,第二夹紧旋转机构310上的第一气缸2042和第二气缸2043的活塞杆部缩回,转移机构500上的第二直线模组5023驱动被夹篮球900上升到位、第一直线模组5021驱动被夹篮球900向后平移到位、第二直线模组5023驱动被夹篮球900下降到正下方的第一夹紧旋转机构2040内,第一夹紧旋转机构2040的第一气缸2042和第二气缸2043的活塞杆部伸出使第一夹爪2048和第二夹爪2049夹紧篮球900,第四气缸活塞杆缩回使第三夹爪504松开篮球900后转移机构500复位到如图10所示状态。
44.s4:转料1:中空旋转平台202如图1所示逆时针旋转90
°
使待描线篮球900旋转到曲线槽描线机构600正下方。
45.s5:描曲线:第一滚珠丝杆电机602驱动第九安装板603下降,使两支第一画笔613笔尖触及在篮球900曲线槽904上,状态如图13所示,此时下方第一夹紧旋转机构2040的伺服电机2046开始配合动作,将篮球900夹持住并如图2所示顺时针缓慢旋转,同时第二滚珠丝杆电机604开始带动两个连杆608向下运动,使得两支第一画笔613角度发生变化,与此同时,正反牙双滑块直线模组606带动两个第十一安装座610向外背向同距同速移动,整个动作过程中,两支第一画笔613与篮球900表面接近垂直角度,待第一画笔613描线至篮球900曲线槽904最远点处,状态如图14所示,正反牙双滑块直线模组606开始反转,同时第一滚珠丝杆电机602和第二滚珠丝杆电机604同时向上移动,进行反向描线,如此四次即可完整描出篮球900曲线,曲线描完后第一滚珠丝杆电机602和第二滚珠丝杆电机604及正反牙双滑块直线模组606复位,下方第一夹紧旋转机构2040的伺服电机2046继续驱动篮球900旋转使篮球900旋转完360度后恢复到描线前位置。
46.s6:转料2:中空旋转平台200如图1逆时针旋转90
°
使待描环形线篮球900旋转到环形槽描线机构700正下方。
47.s7:描环形线:第六气缸704活塞杆伸出驱动第二画笔706接触到篮球900的第一环形槽902,下方的第一夹紧旋转机构2040上的伺服电机2046驱动篮球900如图1和图2所示顺时针旋转360
°
,完成第一环形槽902描线,第五气缸702活塞杆伸出驱动第三夹紧旋转机构7070下降,第三夹紧旋转机构7070上第一气缸2042和第二气缸2043的活塞杆部伸出使第一夹爪2048和第二夹爪2049夹紧篮球900,下方的第一夹紧旋转机构2040上第一气缸2042和第二气缸2043的活塞杆部缩回使第一夹爪2048和第二夹爪2049松开篮球900,第三夹紧旋转机构7070上的伺服电机2046驱动篮球900如图16所示顺时针旋转360
°
,完成第二环形槽903描线,第六气缸704活塞杆缩回驱动第二画笔706上升复位,下方的第一夹紧旋转机构2040上第一气缸2042和第二气缸2043的活塞杆部伸出使第一夹爪2048和第二夹爪2049夹紧篮球900,第三夹紧旋转机构7070上第一气缸2042和第二气缸2043的活塞杆部缩回使第一夹爪2048和第二夹爪2049松开篮球,第五气缸702活塞杆缩回驱动第三夹紧旋转机构7070上升复位。
48.s8:转料3:中空旋转平台202如图1所示逆时针旋转90
°
使描完线篮球900旋转到接
料机构800一侧。
49.s9:接料:接料机构800上第七气缸803活塞杆伸出使移动架802伸出并插入附近转盘203上的第一夹紧旋转机构2040内,附近第一夹紧旋转机构2040上的第一气缸2042和第二气缸2043的活塞杆部缩回使第一夹爪2048和第二夹爪2049松开篮球900,篮球900落入移动架802上并沿移动架802滚到固定架801上,第七气缸803活塞杆缩回使移动架802回缩。
50.s10:空转复位:中空旋转平台202如图1所示逆时针旋转90
°
使无篮球900的第一夹紧旋转装置900旋转到靠近转移机构500一侧。
51.至此完成一个篮球900外壳条纹描线及上下料动作,如此往复便可实现连续作业。
52.好处在于:人工将篮球900气嘴901对准定位针34,并使定位针34插入气嘴901后,定位机构30夹紧并根据视觉定位组件400反馈使篮球900旋转到合适角度,转移机构500将定位好的篮球900移动到旋转机构200上第一夹紧旋转机构2040上,旋转机构200将夹紧篮球900旋转到曲线槽描线机构600下方,曲线槽描线机构600配合下方的第一夹紧旋转机构2040描画篮球900曲线,旋转机构200将描好曲线的篮球900旋转到环形槽描线机构700下方,环形槽描线机构700配合下方的第一夹紧旋转机构2040描画篮球900的两条环形线,旋转机构200将描画好线的篮球900旋转到接料机构800附近,接料机构800配合附近的第一夹紧旋转机构2040,将描好线的篮球900接到固定架801上,实现篮球900外壳线条描画自动化生产,从而降低工人劳动强度;另外在描画曲线槽904上的曲线时,采用两支第一画笔613同时描画,提高曲线描画速度。
53.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
54.最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1