一种医疗机器人加工用的浸漆装置及浸漆方法与流程
1.本发明涉及医疗机器人加工领域,具体为一种医疗机器人加工用的浸漆装置及浸漆方法。
背景技术:
2.随着人工智能的兴起,医院中出现了许多智能配送机器人,智能配送机器人在院区内主要承担送药、送餐进隔离区以及回收被服和医疗垃圾的工作。它们通过“脑部”控制中心的智能调度,即可实现自主开关门、自主搭乘电梯、自主避障、自主充电等功能,无需人员操作。柜子里安装了紫外消毒灯,可以随时保持箱体及物品的安全。机器人还具备远程实时语音视频通信功能,可以通过调度系统与隔离病房的护士或病人直接交流。运送药品机器人可代替护士送饭、送病例和化验单等。
3.医疗机器人外壳产品在模具冲压成型之后,需要将其包覆油漆,以提升产品的光滑度及质感,此过程中采用浸泡上漆的方式能为产品表面包覆较厚的油漆,且浸泡上漆使孔洞内也能够进行包覆油漆,因此多被采用。但是现有医疗机器人产品浸泡上漆的过程中产品夹持过程中不能活动,这样容易使产品表面的油漆厚度不均匀,由此导致的残次品率较高,因此现在急需一种医疗机器人加工用的浸漆装置及浸漆方法来解决上述出现的问题。
技术实现要素:
4.本发明目的是提供一种医疗机器人加工用的浸漆装置,以解决上述背景技术中提出的问题,本发明通过直线电机、电动夹具及电动伸缩臂对产品有效夹持,并且通过直线电机控制产品下移浸漆以及上移离开,通过转角器控制产品旋转,全方面浸泡油漆。
5.实现本发明目的的技术解决方案为:一种医疗机器人加工用的浸漆装置,包括浸漆箱,所述浸漆箱顶部设置有可视罩,所述浸漆箱内部设置有第一直线电机和第二直线电机,所述第一直线电机和第二直线电机分别位于浸漆箱内部左右两侧,所述第一直线电机的动子上设置有转角器,所述转角器的输出轴上设置有第一电动夹具,所述第二直线电机的动子上设置有电动伸缩臂,所述电动伸缩臂的末端设置有第二电动夹具,所述浸漆箱的底部设置有用以过滤油漆的滤网,所述浸漆箱内还设置有抽提过滤后油漆的抽提泵,所述滤网的下方设置有超声波振动器。
6.所述浸漆箱还包括设置在浸漆箱上的控制器和机械手臂,所述控制器分别与第一电动夹具、第二电动夹具、电动伸缩臂、第一直线电机、第二直线电机、机械手臂和转角器电连接。
7.进一步地,所述可视罩与浸漆箱铰接,所述可视罩为倒置梯形结构,所述可视罩材质为钢化玻璃,所述可视罩上设置有把手。
8.进一步地,所述浸漆箱上还设置有用于驱动可视罩打开或关闭的气缸。
9.进一步地,所述浸漆箱的后侧设置有支撑座,所述气缸与支撑座铰接,所述气缸的
动力轴与可视罩铰接。
10.进一步地,所述浸漆箱底部为倒锥形结构,所述浸漆箱底部开设有排出嘴,所述浸漆箱的底部还设置有支撑脚。
11.进一步地,所述第一直线电机与第二直线电机同步运动。
12.进一步地,所述第一电动夹具和第二电动夹具为电动电动夹具或气动电动夹具。
13.进一步地,所述第二电动夹具与电动伸缩臂的末端转动连接。
14.本发明的另一目的在于提供一种浸漆方法,采用上述的医疗机器人加工用的浸漆装置,包括如下步骤:
15.s1、打开可视罩,向浸漆箱内倾注油漆,将超声波振动器和抽提泵通电;
16.s2、控制器控制机械手臂将夹持的产品放置在第一电动夹具和第二电动夹具之间;
17.s3通过控制器控制电动伸缩臂伸长,直至第一电动夹具和第二电动夹具均夹紧产品,控制器控制电动伸缩臂停止伸缩、机械手臂松开产品并回归原位,然后关闭可视罩;
18.s4、随后通过控制器控制第一直线电机与第二直线电机同步向下移动,直至产品接触油漆面以下,通过控制器控制第一直线电机与第二直线电机同步停止移动;
19.s5、随后通过控制器控制转角器转动带动产品旋转浸漆,浸漆结束后,通过控制器控制第一直线电机与第二直线电机同步向上移动,并打开可视罩;
20.s6、通过控制器控制机械手臂夹持住第一电动夹具和第二电动夹具之间的产品,通过控制器控制电动伸缩臂缩短,第一电动夹具和第二电动夹具松开产品,机械手臂将产品转移出浸漆装置。
21.本发明与现有技术相比,其显著优点是:
22.1、本发明的第一直线电机与第二直线电机连接电源后,第一直线电机控制第一电动夹具上下移动,第二直线电机控制第二电动夹具上下移动,电动伸缩臂通电后控制电动伸缩臂伸缩,进而夹紧第一电动夹具与第二电动夹具之间的产品,转角器通电后通过带动第一电动夹具转动进而带动产品转动,实现产品全面浸漆;
23.2、本发明通过直线电机、电动夹具及电动伸缩臂对产品有效夹持,并且通过直线电机控制产品下移浸漆以及上移离开,通过转角器控制产品旋转,全方面浸泡油漆;
24.3、本发明采用超声波振动器对油漆进行超声震动处理,使油漆全面浸润到产品,且超声波震动起到对产品表面残留清除的效果,通过抽提泵和滤网的结合使油漆始终处于流动过滤的状态,油漆更为均一稳定,也更加纯净。
附图说明
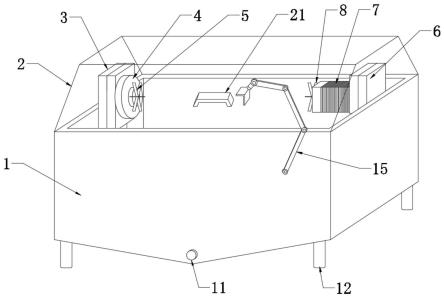
25.图1为本发明一种医疗机器人加工用的浸漆装置的结构示意图。
26.图2为本发明一种医疗机器人加工用的浸漆装置的右视剖面图。
27.图3为本发明一种医疗机器人加工用的浸漆装置中控制器的连接原理图。
28.图中:1浸漆箱、11排出嘴、12支撑脚、2可视罩、21把手、3第一直线电机、4转角器、5第一电动夹具、6第二直线电机、7电动伸缩臂、8第二电动夹具、9气缸、91支撑座、10超声波振动器、13抽提泵、131抽提管、132喷嘴、14滤网、15机械手臂。
具体实施方式
29.以下结合附图,详细说明本发明的实施方式。
30.本发明提供一种技术方案:参照图1和图2,一种医疗机器人加工用的浸漆装置,包括浸漆箱1,浸漆箱1顶部设置有可视罩2,可视罩2与浸漆箱1铰接,可视罩2为倒置梯形结构,可视罩2材质为钢化玻璃,可供操作人员实时监察机器人产品浸漆情况,可视罩2上设置有把手21,用于手动情况下打开可视罩2。
31.参照图2,浸漆箱1的底部设置有用以过滤油漆的滤网14,所述浸漆箱1内还设置有抽提过滤后油漆的抽提泵13,滤网14的下方设置有超声波振动器10;抽提泵13的出液端设置有喷嘴132,抽提泵13的进液端设置有抽提管131,抽提泵13的底端贯穿滤网14;
32.通过超声波振动器10对油漆进行超声震动处理,使油漆全面浸润到产品,且超声波震动起到对产品表面残留清除的效果;通过抽提管131抽吸滤网14下方过滤的油漆,经过抽提泵13重新排入至浸漆箱1内,滤网14对油漆内的残留进行过滤,另外通过使抽提泵13使油漆始终处于流动过滤的状态,油漆更为均一稳定,通过滤网14对油漆内的残留过滤,油漆也更加纯净。
33.参照图3,还包括设置在浸漆箱1内的控制器,控制器分别与第一电动夹具5、第二电动夹具8、电动伸缩臂7、第一直线电机3、第二直线电机6和转角器4电连接,通过控制器控制第一电动夹具5、第二电动夹具8、电动伸缩臂7、第一直线电机3、第二直线电机6和转角器4的动作。
34.参照图2,浸漆箱1上还设置有用于驱动可视罩2打开或关闭的气缸9,浸漆箱1的后侧设置有支撑座91,气缸9与支撑座91铰接,气缸9的动力轴与可视罩2铰接,气缸9连接气源后,通过气缸9伸缩来驱动可视罩2打开和关闭。
35.参照图1和图2,浸漆箱1内部设置有第一直线电机3和第二直线电机6,第一直线电机3与第二直线电机6同步运动,第一直线电机3和第二直线电机6分别位于浸漆箱1内部左右两侧,第一直线电机3的动子上设置有转角器4,转角器4的输出轴上设置有第一电动夹具5,第二直线电机6的动子上设置有电动伸缩臂7,电动伸缩臂7的末端设置有第二电动夹具8,第二电动夹具8与电动伸缩臂7的末端转动连接;
36.第一直线电机3与第二直线电机6连接电源后,第一直线电机3控制第一电动夹具5上下移动,第二直线电机6控制第二电动夹具8上下移动,电动伸缩臂7通电后控制电动伸缩臂7伸缩,进而夹紧第一电动夹具5与第二电动夹具8之间的产品,转角器4通电后通过带动第一电动夹具5转动进而带动产品转动,实现产品全面浸漆。
37.参照图1和图2,浸漆箱1底部为倒锥形结构,浸漆箱1底部开设有排出嘴11,有利于油漆集中从排出嘴11排出,浸漆箱1的底部还设置有支撑脚12。
38.另外,本发明还提供一种浸漆方法,采用上述的医疗机器人加工用的浸漆装置,包括如下步骤:
39.s1、打开可视罩2,向浸漆箱1内倾注油漆,将超声波振动器10和抽提泵13通电,然后关闭可视罩2;
40.s2、随后打开可视罩2,将产品放置在第一电动夹具5和第二电动夹具8之间,然后关闭可视罩2;
41.s3通过控制器控制电动伸缩臂7伸长,直至第一电动夹具5和第二电动夹具8均夹
紧产品,控制器控制电动伸缩臂7停止伸缩;
42.s4、随后通过控制器控制第一直线电机3与第二直线电机6同步向下移动,直至产品触及油漆面以下5~30cm,通过控制器控制第一直线电机3与第二直线电机6同步停止移动;
43.s5、随后通过控制器控制转角器4转动带动产品旋转浸漆,浸漆结束后,通过控制器控制第一直线电机3与第二直线电机6同步向上移动,并打开可视罩2;其中转角器4转速控制在5~12r/min;
44.s6通过机械手臂15夹持住第一电动夹具5和第二电动夹具8之间的产品,通过控制器控制电动伸缩臂7缩短,第一电动夹具5和第二电动夹具8松开产品,机械手臂15将产品转移出去,然后放入下一个产品。
45.作为本发明的一个实施例:首先气缸9通气收缩打开可视罩2,封堵排出嘴11,向浸漆箱1内倾注油漆,将超声波振动器10和抽提泵13通电,然后气缸9断气伸长关闭可视罩2;随后气缸9通气收缩打开可视罩2,将产品放置在第一电动夹具5和第二电动夹具8之间,然后气缸9断气伸长关闭可视罩2;
46.通过超声波振动器10对油漆进行超声震动处理,使油漆全面浸润到产品,且超声波震动起到对产品表面残留清除的效果;通过抽提管131抽吸滤网14下方过滤的油漆,经过抽提泵13重新排入至浸漆箱1内,滤网14对油漆内的残留进行过滤,另外通过使抽提泵13使油漆始终处于流动过滤的状态,油漆更为均一稳定,通过滤网14对油漆内的残留过滤,油漆也更加纯净;
47.随后通过控制器控制电动伸缩臂7伸长,直至第一电动夹具5和第二电动夹具8均夹紧产品,控制器控制电动伸缩臂7停止伸缩;
48.随后通过控制器控制第一直线电机3与第二直线电机6同步向下移动,直至产品触及油漆面以下5~30cm,通过控制器控制第一直线电机3与第二直线电机6同步停止移动;
49.随后通过控制器控制转角器4转动,直至肉眼观察不到产品表面存在气泡后,通过控制器控制第一直线电机3与第二直线电机6同步向上移动,在此期间转角器4转速控制在5~12r/min;
50.随后第一直线电机3与第二直线电机6同步向上移动,通过控制器控制电动伸缩臂7缩短,通过机械手臂15取出第一电动夹具5和第二电动夹具8之间的产品,重复上述步骤;
51.在浸漆3~5个产品之后,取出并清洗滤网,在浸漆10~20个产品之后,打开排出嘴11,排空浸漆箱1内的油漆,随后关闭排出嘴11,并重新向浸漆箱1内倾注油漆。
52.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1