基于三维视觉的眼镜框喷涂方法、设备及存储介质与流程
本技术涉及三视觉,特别涉及一种基于三维视觉的眼镜框喷涂方法、设备及存储介质。
背景技术:
1、眼镜是人们常用的一种工具,或调节视力,或增加装饰,一般都包括眼镜片、眼镜框等,目前大部分镜框是采用金属/塑料材质制成的,通常情况下常出于保护或美化眼镜框色彩的目的,会在眼镜框表面进行喷涂,眼镜框喷涂过程中要求油墨颜色均匀,无飞溅现象、指定区域全覆盖等需求,对喷涂工艺有较高要求,因此,如何对眼镜框进行准确的喷涂操作是行业中需要考虑的问题
技术实现思路
1、本技术提供一种基于三维视觉的眼镜框喷涂方法、设备及存储介质,用以准确且高效地对眼镜框进行喷涂操作。
2、第一方面,本技术实施例提供基于三维视觉的眼镜框喷涂方法,包括:
3、对待处理眼镜进行三维图像采集,得到原始三维眼镜图;
4、对上述原始三维眼镜图进行去噪处理,得到上述待处理眼镜中眼镜框体的眼镜框体图;
5、从上述眼镜框体图中提取上述眼镜框体的喷涂轨迹;
6、基于上述原始三维眼镜图中上述待处理眼镜的形变信息,对上述喷涂轨迹进行修正,得到修正轨迹;
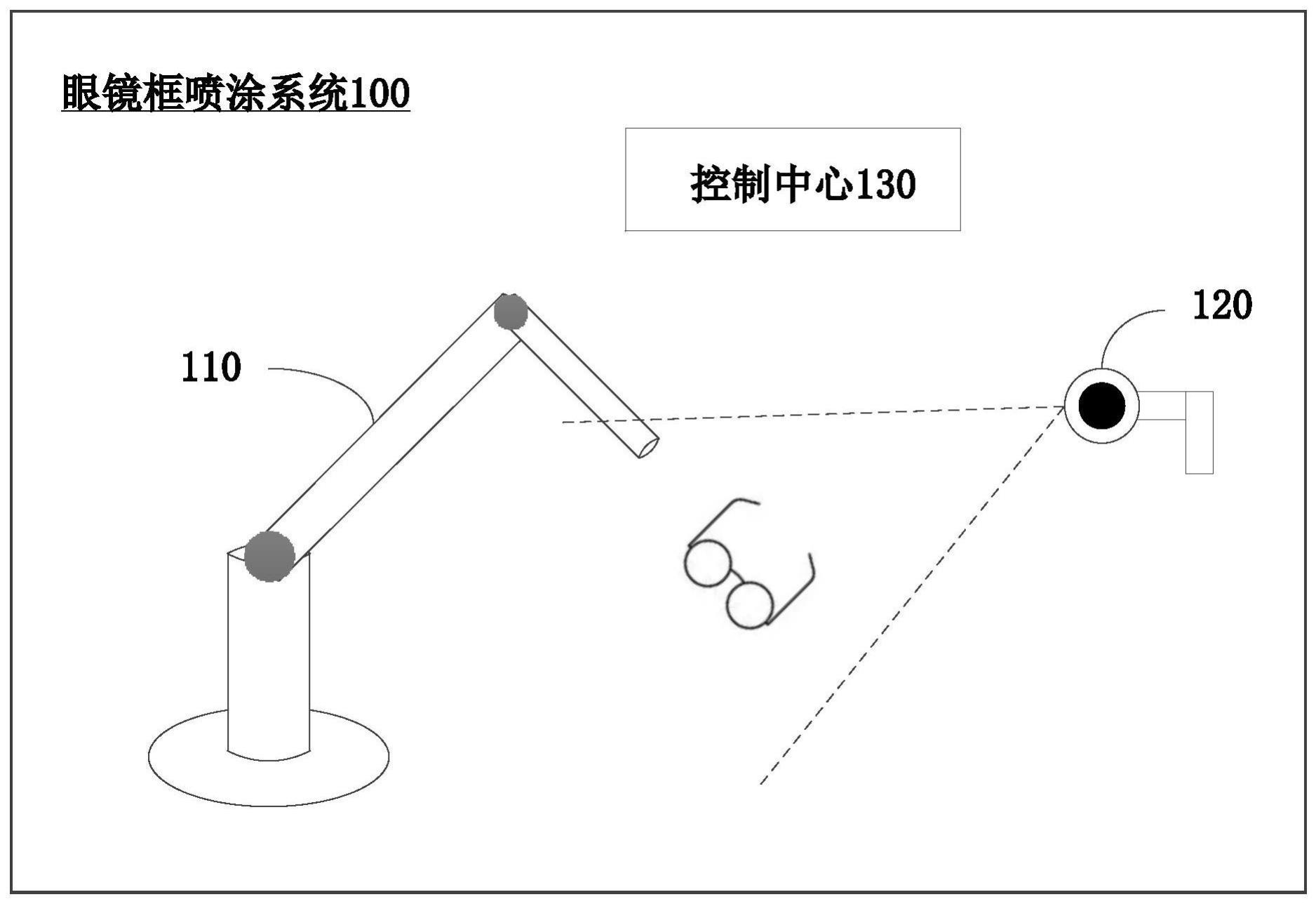
7、根据上述修正轨迹控制涂料机器人对上述眼镜框体进行喷涂操作。
8、一方面,本技术实施例中直接通过三维视觉技术提取眼镜的眼镜框轨迹(喷涂轨迹和修正轨迹),并控制涂料机器人按照提取的眼镜框轨迹自动对眼镜框进行喷涂操作,可以实现高效地对眼镜框进行自动喷涂操作;另一方面,现有技术中多数情况下生产出的眼镜框较标准眼镜框会存在一定形变,且不同的眼镜框的形变情况可能不一致,本技术实施例中进一步基于当前眼镜的形变信息对喷涂轨迹进行修正,并控制喷涂机器人按照调整后的修正轨迹对眼镜框进行喷涂,实现了对发生不同形变的眼镜框进行针对性的喷涂操作,显著提升了针对大量眼镜框进行喷涂操作的准确度,从而获得质量较高的喷涂眼镜框后的眼镜产品。
9、在一种实施方式中,所述根据所述修正轨迹控制涂料机器人对所述眼镜框体进行喷涂操作,包括:
10、确定机器人坐标系和图像坐标系的位置转换关系,所述机器人坐标系是基于所述涂料机器人创建的坐标系,所述图像坐标系为基于采集所述原始三维眼镜图的三维相机创建的坐标系;
11、根据所述位置转换关系和所述修正轨迹,控制所述涂料机器人对所述眼镜框体进行喷涂操作。
12、在一种实施方式中,所述位置转换关系是通过如下方式获得的:
13、通过所述三维相机对标定物进行三维图像采集,得到三维物体图像,并基于所述三维物体图像,获取所述标定物的中m个特征点的图像位置数据;所述标定物放置于所述涂料机器人的执行空间内,所述m为大于2的整数;
14、控制所述涂料机器人执行至所述标定物中的所述m个特征点,获得所述m个特征点的空间位置数据;
15、根据所述m个特征点的图像位置数据和所述m个特征点的空间位置数据,确定所述位置转换关系。
16、在一种实施方式中,所述根据所述位置转换关系和所述修正轨迹,控制所述涂料机器人对所述眼镜框体进行喷涂操作,包括:
17、根据所述位置转换关系,将所述修正轨迹转换为所述机器人坐标系下的空间位置轨迹;
18、控制所述涂料机器人沿所述空间位置轨迹进行喷涂操作。
19、在一种实施方式中,所述对所述原始三维眼镜图进行去噪处理,得到所述待处理眼镜中眼镜框体的眼镜框体图,包括:
20、将空间域中的所述原始三维眼镜图变换到零平面得到零平面图像;
21、通过滤波技术对所述零平面图像中的非喷涂目标进行滤除,所述非喷涂目标为所述眼镜框体之外的眼镜部件;
22、使用快速掩膜工具,将进行滤波后的零平面图像中各像素的位置变换到所述空间域中的所述原始三维眼镜图的对应像素位置,得到所述眼镜框体图。
23、在一种实施方式中,所述通过滤波技术对所述零平面图像中的非喷涂目标进行滤除,包括:
24、确定所述零平面图像中的非喷涂区域,所述非喷涂区域为所述零平面图像中所述非喷涂目标对应的图像区域;
25、通过高度过滤波技术对所述零平面图像中的非喷涂区域进行第一滤除,得到初步滤波图像;
26、通过斑块过滤滤波工具对所述初步滤波图像中的杂散点进行第二滤除,所述杂散点为所述初步滤波图像中所述待处理眼镜的周边区域中的点。
27、在一种实施方式中,所述从所述眼镜框体图中提取所述眼镜框体的喷涂轨迹,包括:
28、通过样条抓取工具对所述眼镜框体图进行样条抓取,获得所述喷涂轨迹;或
29、通过训练后的喷涂轨迹识别模型对所述眼镜框体图进行识别,得到所述喷涂轨迹;或
30、对所述眼镜框体图进行眼镜骨架提取得到眼镜骨架图,并对所述眼镜骨架图上各像素点的色彩信息进行分析得到所述喷涂轨迹。
31、在一种实施方式中,所述基于所述原始三维眼镜图中所述待处理眼镜的形变信息,对所述喷涂轨迹进行修正,得到修正轨迹之前,还包括:
32、确定所述待处理眼镜对应的基准三维眼镜图;
33、根据确定的基准三维眼镜图和所述原始三维眼镜图的匹配程度,确定所述待处理眼镜的形变信息。
34、在一种实施方式中,所述确定所述待处理眼镜对应的基准三维眼镜图,包括:
35、确定所述待处理眼镜的眼镜类型为目标眼镜类型;
36、将所述目标眼镜类型关联的基准三维眼镜图,确定为所述所述待处理眼镜对应的基准三维眼镜图。
37、在一种实施方式中,所述根据确定的基准三维眼镜图和所述原始三维眼镜图的匹配程度,确定所述待处理眼镜的形变信息,包括:
38、确定所述待处理眼镜的至少一个目标部件;
39、将所述原始三维眼镜图中所述目标部件对应的图像区域确定为第一目标区域,以及将所述基准三维眼镜图中所述目标部件对应的图像区域确定为第二目标区域;
40、基于所述第一目标区域和所述第二目标区域的相似程度,确定所述待处理眼镜的形变信息。
41、在一种实施方式中,所述形变信息包括形变程度;所述基于所述原始三维眼镜图中所述待处理眼镜的形变信息,对所述喷涂轨迹进行修正,包括:
42、基于所述形变程度确定轨迹修正幅度,所述轨迹修正幅度和所述形变程度呈正相关;
43、基于所述轨迹修正幅度对所述喷涂轨迹进行调整,得到所述修正轨迹。
44、第二方面,本技术实施例提供的一种电子设备,包括处理器和存储器,所述存储器用于存储所述处理器可执行的程序,所述处理器用于读取所述存储器中的程序并执行如下步骤:
45、对待处理眼镜进行三维图像采集,得到原始三维眼镜图;
46、对所述原始三维眼镜图进行去噪处理,得到所述待处理眼镜中眼镜框体的眼镜框体图;
47、从所述眼镜框体图中提取所述眼镜框体的喷涂轨迹;
48、基于所述原始三维眼镜图中所述待处理眼镜的形变信息,对所述喷涂轨迹进行修正,得到修正轨迹;
49、根据所述修正轨迹控制涂料机器人对所述眼镜框体进行喷涂操作。
50、第三方面,本技术实施例还提供一种基于三维视觉的眼镜框喷涂装置,包括:
51、图像采集单元,被配置为执行对待处理眼镜进行三维图像采集,得到原始三维眼镜图;
52、图像处理单元,被配置为执行对所述原始三维眼镜图进行去噪处理,得到所述待处理眼镜中眼镜框体的眼镜框体图;
53、轨迹提取单元,被配置为执行从所述眼镜框体图中提取所述眼镜框体的喷涂轨迹;
54、轨迹修正单元,被配置为执行基于所述原始三维眼镜图中所述待处理眼镜的形变信息,对所述喷涂轨迹进行修正,得到修正轨迹;
55、喷涂单元,被配置为执行根据所述修正轨迹控制涂料机器人对所述眼镜框体进行喷涂操作。
56、第四方面,本技术实施例还提供计算机存储介质,其上存储有计算机程序,该程序被处理器执行时用于实现所述第一方面所述方法的步骤。
57、本技术的这些方面或其他方面在以下的实施例的描述中会更加简明易懂。
- 还没有人留言评论。精彩留言会获得点赞!