一种实木椅子机器人静电喷涂用的喷涂工位的制作方法
1.本实用新型涉及机器人喷涂技术领域,具体为一种实木椅子机器人静电喷涂用的喷涂工位。
背景技术:
2.传统的实木椅子喷涂行业内普遍采用人工作业,人工作业的方式存在诸多问题:喷涂质量一致性较差、效率偏低、操作者存在健康隐患、造成一定的环境污染等等。与其对比,机器人喷涂具有可重复性好、喷涂质量稳定、工作效率高、可集中处理相关污染源等优点。因此,目前的实木椅子喷涂行业开始逐步使用机器人喷涂,但在实际机器人喷涂作业的过程中,由于放置实木椅子的喷涂工位无法旋转,通常的做法是在工位的两侧设置两个喷涂机器人进行同时喷涂,以解决工位无法旋转的问题,虽然提高了工作效率,但增加了投入成本,以及由于增添了一台喷涂机器人,带来了空间布局以及后续污染源收集等难题;其次,传统的喷涂工位不能手动旋转补喷,存在一定的局限性。
技术实现要素:
3.为了解决上述技术问题,本实用新型提出了一种实木椅子机器人静电喷涂用的喷涂工位。
4.本实用新型所要解决的技术问题采用以下技术方案来实现:
5.一种实木椅子机器人静电喷涂用的喷涂工位,包括喷涂工作台,还包括:
6.支撑横梁架,转动安装在喷涂工作台上,旋转中心位于支撑横梁架中部;
7.支撑板,用于放置实木椅子,对应转动安装在支撑横梁架的两侧端部上,包括自动旋转和手动旋转两种方式。
8.优选地,所述支撑横梁架的中部梁架上设有隔离挡板。
9.优选地,所述喷涂工作台的台底内部设有与支撑横梁架中部连接的行星齿轮减速机、蜗轮蜗杆减速机。
10.优选地,所述支撑板上对应设有四个用于固定实木椅子支脚的支撑尖柱块。
11.优选地,所述支撑横梁架的两侧端部上设有转轴台,所述支撑板对应连接在转轴台上。
12.优选地,所述支撑横梁架的两侧端部内对应设有与转轴台连接的驱动电机。
13.优选地,所述转轴台上铰接有可在竖直状态和水平状态间切换的传动轴杆。
14.优选地,所述传动轴杆的外端下侧部上设有卡合凸柱,传动轴杆的外端部正侧面上连接有旋转把手。
15.优选地,所述支撑板上设有与卡合凸柱配合使得支撑板与传动轴杆卡合连接的卡合槽。
16.本实用新型的有益效果是:
17.与现有技术相比,本实用新型通过设置可转动的支撑横梁架,使得工位能够旋转,
解决了现有工位无法旋转的问题;通过驱动电机、转轴台、传动轴杆、旋转把手,使得喷涂工位具有能够自动旋转和手动旋转两种功能,解决了传统的喷涂工位不能手动旋转补喷的难题。
附图说明
18.下面结合附图和实施例对本实用新型进一步说明:
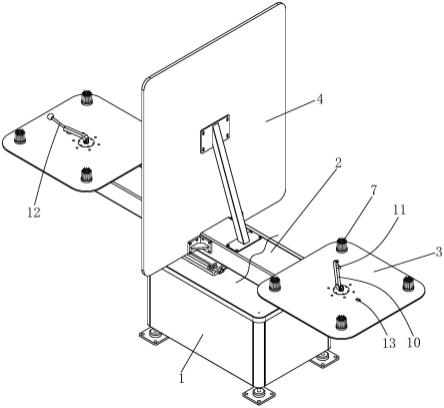
19.图1为本实用新型的结构示意图;
20.图2为本实用新型中喷涂工作台的内部结构示意图;
21.图3为本实用新型支撑横梁架的右端部结构示意图;
22.图4为本实用新型支撑横梁架的左端部结构示意图;
23.图5为本实用新型支撑横梁架的左部的底部结构示意图;
24.图6为本实用新型支撑横梁架的左端部的底部内部结构示意图;
25.图7为本实用新型使用示意图。
26.图中:1、喷涂工作台;2、支撑横梁架;3、支撑板;4、隔离挡板;5、行星齿轮减速机;6、蜗轮蜗杆减速机;7、支撑尖柱块;8、转轴台;9、驱动电机;10、传动轴杆;11、卡合凸柱;12、旋转把手;13、卡合槽。
具体实施方式
27.为了使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合附图以及实施例对本实用新型进一步阐述。
28.如图1至图6所示,一种实木椅子机器人静电喷涂用的喷涂工位,主要由喷涂工作台1、支撑横梁架2、两个支撑板3、隔离挡板4、行星齿轮减速机5、蜗轮蜗杆减速机6、八个支撑尖柱块7、两个转轴台8、两个驱动电机9等组成。
29.具体的,所述喷涂工作台1的台面上设有转台,所述支撑横梁架2的中部固定安装在转台上,两个转轴台8对应设置在支撑横梁架2的两个端部上,两个支撑板3对应固定安装在两个转轴台8上,两个驱动电机9对应设置在支撑横梁架2的两个端部内部,并与两个转轴台8对应连接,通过驱动电机9带动转轴台8,使得安装在转轴台8上的支撑板3进行旋转,通过驱动电机9的设置,使得支撑板3具有了自动旋转功能。
30.每个转轴台8上还各自铰接有一个传动轴杆10,所述传动轴杆10能够绕其铰接点进行转动,实现在竖直状态和水平状态间切换,每个传动轴杆10的外端下侧部均设有一个与传动轴杆10呈垂直分布的卡合凸柱11,对应的支撑板3上设有与卡合凸柱11位置对应的卡合槽13。当传动轴杆10转动至水平状态时,所述传动轴杆10上的卡合凸柱11恰好卡在支撑板3上的卡合槽13内,使得支撑板3与转轴台8连为一体,进一步地,每个传动轴杆10的外端部正侧面上均设有一个连接轴孔,所述连接轴孔内能够安装一个可拆卸的旋转把手12(本实施例中只在支撑横梁架2左端部的传动轴杆10上安装有旋转把手12,但不排除支撑横梁架2左端部的传动轴杆10上也能安装旋转把手12),通过拨动旋转把手12,使得支撑板3能够随转轴台8同步转动,使得支撑板3具有了手动旋转功能。
31.所述隔离挡板4竖直固定安装在支撑横梁架2的中部,起到将两个支撑板3隔开的作用,避免了喷涂机器人对其中一个支撑板3上的实木椅子喷涂时油漆飞溅到另一端的支
撑板3上。
32.所述行星齿轮减速机5、蜗轮蜗杆减速机6相互连接,且对应固定安装在喷涂工作台1内部的固定架板上,所述行星齿轮减速机5与转台连接,通过转台带动支撑横梁架2转动,使得支撑横梁架2两个端部上的支撑板3上的实木椅子能够旋转换位。
33.八个支撑尖柱块7分为两组,一组四个,对应设置在两个支撑板3上,每个支撑板3上的四个支撑尖柱块7的分布位置与实木椅子的四个支脚对应,以保证实木椅子放置后,四个支脚刚好对应固定放置在四个支撑尖柱块7上。
34.使用时,如图7所示,每个支撑板3上放置一个实木椅子,对应放置在支撑尖柱块7上固定放好。喷涂机器人对支撑横梁架2右端部的实木椅子进行喷涂时,工人对支撑横梁架2左端部的实木椅子进行人工补喷,人工补喷过程中,可对当前的支撑板3进行自动旋转或手动旋转。
35.自动旋转过程为:启动当前端部处的驱动电机9,使其通过转轴台8带动支撑板3进行旋转;手动旋转过程为:将旋转把手12插入到当前的传动轴杆10上的连接轴孔内,然后将当前的传动轴杆10转动至水平状态,使卡合凸柱11卡合在当前支撑板3上的卡合槽13内,然后转动旋转把手12,使当前支撑板3转动。
36.人工补喷完成后,将旋转把手12取下,然后支撑横梁架2旋转,将喷涂机器人喷涂后的实木椅子旋转至人工补喷处,将人工补喷的实木椅子旋转至喷涂机器人喷涂处。
37.以上显示和描述了本实用新型的基本原理、主要特征和本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是本实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1