配药载具的制作方法
1.本实用新型涉及一种配药载具。
背景技术:
2.mrna疫苗,其通常作为某些病毒预防的主力军之一,也已经证明了它的功效与市场潜力。在相应病毒抗原蛋白确定之后,需要针对氨基酸序列设计相应的mrna序列。因为每种氨基酸对应的密码子有多种选择,这就对密码子的筛选提出了新的挑战,人工筛选存在着速度慢、易出错等缺陷,急需mrna高通量合成设备的替代。
3.对于例如mrna高通量合成设备,其所需原料药往往有十几种,甚至是几十种,人工配药时,即便是按序配药,仍然比较容易出现差错,尤其是给药量,人工较难控制。
4.有鉴于此,采用配药装置完成配药是当前较为常见的选择,配药装置基于程序控制,按照既定的步骤完成配药,再辅助移液器由机器控制给药量,几乎不会出现配药差错,即便是人为介入部分出现差错,也易于被纠正,例如原料药位置放置错误,在配药装置所配机械手夹取相关药瓶后,可以通过例如扫码确认的方式进行查证,从而不容易出现错误。
5.然而,程序化的配药方式需考虑原料药的配给、混药(可能会有多次混药)等步骤,在不同的步骤中,为了避免不同工艺设备的位置干涉、运动干涉,合成药所需各种容器需要处于不同的位置。有鉴于对于例如合成药容器在辅助合成药的过程中需处于不同的工位,其位置停靠应比较精确,否则会影响例如移液枪等其他工艺设备的精确操作。
6.当前适用于合成设备设置的配药载具往往相对简单,例如在固定位置设置配药载具,其他工艺设备围绕配药载具设置,该种方式会影响合成设备的整体布局,尤其是适应于配药工艺的预定操作,合成设备所配机器人(一般是机械臂)动作范围比较大,其它工艺设备在位置上的杂乱性,使得所配机器人的位姿控制变得非常困难。
技术实现要素:
7.本实用新型的目的在于提供一种能够有效减轻药物合成设备负担的配药载具。
8.为实现上述目的,本实用新型所提供一种配药载具,其包括:
9.直线运动机构,具有水平方向的输出运动构件,该输出运动构件具有由第一止点和第二止点确定出的工作行程;
10.载台,安装在所述输出运动构件上,并适应于第一止点而具有第一工位,适应于第二止点而具有第二工位;
11.其中,载台上设有用于合成药瓶定位的第一定位孔、用于原料药瓶定位的第二定位孔,并且第一定位孔的数量为第二定位孔数量的n倍,n为3~10。
12.可选地,载台上还设有用于合成药瓶盖定位的第三定位孔;
13.所述第三定位孔的数量与所述第一定位孔的数量相同,且一一对应。
14.可选地,第一定位孔呈单行均匀排布,而构成第一定位孔行;
15.第三定位孔呈单行均匀排布,所构成第三定位孔行位于第一定位孔行一侧;
16.第二定位孔位于第一定位孔行另一侧。
17.可选地,第二定位孔的数量为1;
18.定义第一定位孔行的一端为始端,所述第二定位孔与第一定位孔行始端的第一个第一定位孔对位。
19.可选地,载台具有位于底部以用于与输出运动构件连接的座板,该座板位于第二定位孔所在侧,与构造出第二定位孔的载台体部分呈一行。
20.可选地,相应于第一止点和第二止点,于直线运动机构的机架上装有或形成有机械限位装置或结构。
21.可选地,第一止点和第二止点设有用于检测载台是否到位的传感器。
22.可选地,所述直线运动机构的动力机为伺服电机;
23.所述伺服电机配有旋转编码器或在直线运动机构的机架上装有光栅尺。
24.可选地,所述直线运动机构为丝母丝杠机构;
25.相应地,所述载台安装在丝母丝杠机构的滑块上。
26.可选地,所述丝母丝杠机构为一无尘模组的主构成。
27.在本实用新型的实施例中,采用运动形式易于控制且精度易于控制的直线运动机构,进一步基于其工作行程的两个止点确定出两个工位,在一个工位可以进行例如配药,而在另一个工位可以进行例如混药,而直线运动机构的工作行程拉长了例如配药载具的空间,利于例如给药、混药设备的布局,相互间的干涉位置相对减少,利于例如配药机器人的位姿控制,整体上能够有效减轻药物合成设备的负担。
附图说明
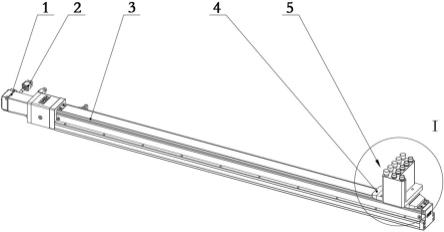
28.图1为一实施例中配药载具结构示意图。
29.图2为图1的i部放大图。
30.图中:1.伺服电机,2.航空插头,3.无尘模组,4.滑块,5.载台,6.台体,7.合成药瓶盖,8.合成药瓶,9.原料药瓶,10.装配孔,11.座板。
具体实施方式
31.作为机械领域的常识,工作行程专指加工工具或工件以加工进给速度完成一次进给运动工步的行程。不过,工作行程也泛指部件从初始位置到工作位置的运动行程,其中初始位置为例如该部件的原始停靠位置,因此,该部件自工作位置回到初始位置的过程又称复位。在本实用新型的实施例中,工作位置为运动行程的末端,工作行程与初始位置的停靠位置称为部件的止点,两止点间的距离即工作行程。
32.需要说明的是,在本实用新型的实施例中,两个止点都可以是工作位置。
33.在本实用新型的实施例中,工作行程确定出例如配药位和混药位,拉长配药混药位置的间距,从而减少运动干涉点,而利于例如机器人位姿的设置。
34.采用直线运动机构的一个重要原因是,在直线运动机构的运动精度相对容易控制的同时,每个配药周期往往需要完成多次的配药混药步骤,在于对于一个需要十几、几十种原料的合成药而言,其原料药往往需要分时投入,分时混合,因此,在例如三种原料药先行投入,先行混合均匀后,方可进行下一次的例如两种原料药的投入,然后混合均匀后再依次
投入其他原料药,依次类推。在若干次投药混匀的过程中,直线运动机构需要运动若干次,在一些实现中可以采用动力机与直线运动机构直连的方式,也可以采用中间传动链装有离合器的方式,后者通过减少例如电动机的启停次数以减少对电动机的损伤。
35.随着技术的发展,例如伺服电机1,其容许的频繁启动的频率高于传统的电动机,同时,伺服电机1基于伺服控制可以精准的控制直线运动机构中的输出运动构件的停靠位置。因此,在本实用新型的实施例中,直线运动机构的动力机优选伺服电机1,备选动力机为普通电动机,在配置了普通电动机的条件下,需要为其辅助例如旋转编码器,以利于通过例如闭环的方式控制其停靠精度。
36.伺服电机一般都会配有标准插头,利用接线,例如航空插头2。
37.直线运动机构作为配药载具的基本配置,其可以采用丝母丝杠机构、流体缸配合导引副的结构、直线动力机(如直线电机)配合导引副的结构,以及曲柄滑块机构等。其中,以丝母丝杠机构为优选,丝母丝杠机构驱动精度高,即便不依赖于闭环控制,仍可获得比较高的精度。
38.如前所述,对于直线运动机构,适用于本实用新型的实施例,其具有水平方向的输出运动构件,如丝母丝杠机构的滑块4、流体缸推杆上装配的滑块4、直线动力机电机轴上装配的滑块4,曲柄滑块机构的滑块4等,滑块4构成用于载置载台5的部件,载台5可以定位在例如滑块4上。
39.另关于丝母丝杠机构,当前出现了一种被称为无尘模组3的丝母丝杠机构成品件,又称为无尘型模组,目前可直接市购,对此不再赘述。
40.载台5在例如滑块4上的定位,可以采用例如隼接的方式直接卡在滑块4上,也可以在例如滑块4的上表面开恰好能卡住载台下端的矩形槽,如图2中所示的台体6的下端为圆角矩形结构,可以直接卡入矩形槽。
41.而在一些实施例中,载台5可以采用紧固件紧固在例如滑块4上,在图2例示的结构中,载台5的台体6下端具有座板11,座板11上开有装配孔10,可以使用例如螺钉装配在滑块4上。
42.由于例如载台5属于轻载物,可以使用例如单颗或者两颗螺钉进行装配。
43.采用一颗螺钉进行装配时还可以匹配定位结构,例如前述的隼接或者矩形槽,在载台5卡入例如矩形槽后,再使用螺钉辅助紧固。
44.例如滑块4的输出运动构件基于直线运动机构的驱动,理论上可以在其工作行程内的任何一个位置停靠,在本实用新型的实施例中,采用两个止点确定两个基本的停靠位置,在适用于药物合成设备时,例如滑块4的停靠位置包括但不限于前述的两个止点。
45.相应地,停靠位置即工位,基于以上的描述,可由直线运动机构的特性可知,基于本实用新型实施例的配药载具可具有两个或两个以上的工位。
46.为方便描述,将适应于两个止点中的第一止点的工位称为第一工位,适应于第二止点的工位称为第二工位。
47.进而,载台5上设有用于合成药瓶8定位的第一定位孔、用于原料药瓶9定位的第二定位孔,并且第一定位孔的数量为第二定位孔数量的n倍,n为3~10。
48.对于合成药,其原料药数量一般都相对较多,如前所述的十几种,甚至是几十种,如果采用一对一的原料药瓶9与合成药瓶8的配置模式,势必会造成原料药瓶9与合成药瓶8
容量规格严重失衡的问题,影响载台5尺寸的设计,即需满足容量相对较大的合成药瓶8的设计,对容量小的原料药瓶9而言尺寸冗余量过大。
49.合成药瓶8数量相对较多时,一个原料药瓶9可以存放相对较大量的原料药,使得合成药瓶8和原料药瓶9的容量规格相对较为接近,所构建第一定位孔和第二定位孔的尺寸相对合理,从而使载台5的整体尺寸相对紧凑。
50.需要说明的是,如前所述,由于原料药比较多,在载台5上用于原料药瓶9定位的第二定位孔的数量尽可能少,例如1个,在此条件下,例如机械手每次拾取一个原料药瓶9,然后对其进行例如扫码识别,不容易出错。
51.当第三定位孔的数量为1个时,定义第一定位孔行的一端为始端,所述第二定位孔与第一定位孔行始端的第一个第一定位孔对位,而表现为图2所示的情形,图2中原料药瓶9只有一个,位于图中台体6的右下角。
52.在原料药瓶9的药液取用完毕后,例如机械手将空的原料药瓶9取走,在拾取其他原料药瓶9,以此类推,完成全部原料药的配给,不容易出错。
53.在图1和图2例示的结构中,载台5上还设有用于合成药瓶盖7定位的第三定位孔;
54.所述第三定位孔的数量与所述第一定位孔的数量相同,且一一对应。应知,该种对应无论是何种形式的对应,都不影响本领域技术人员的正确理解,在于其必然的含义是一支合成药瓶8配一个合成药瓶盖7,两者距离越近越好,负影响因素只有一个,即是否会影响移液,如果不影响,合成药瓶8与配属给其的合成药瓶盖7的距离越小越好,取10~20mm为宜。
55.在一些实施例中,如图2例示的结构,第一定位孔呈单行均匀排布,而构成第一定位孔行;注:第一定位孔与图2中显示的合成药瓶8位置重叠。
56.第三定位孔呈单行均匀排布,所构成第三定位孔行位于第一定位孔行一侧;注:第三定位孔与图2中显示的合成药瓶盖7的位置重叠。
57.进一步地,第二定位孔位于第一定位孔行另一侧,注:图2中第二定位孔的位置与原料药瓶9的位置重叠。由此确定的布局会呈现出图2中所示的三行布局,合成药瓶8居中,不容易产生移液的运动干涉。
58.从图2的结构中可以看出,载台5具有位于底部以用于与滑块4连接的座板11,该座板11位于第二定位孔所在侧,与构造出第二定位孔的载台体部分呈一行。注:此处的行与前述的第一定位孔行平行。
59.为了确保例如滑块4停靠的精度,相应于第一止点和第二止点,于直线运动机构的机架上装有或形成有机械限位装置或结构。
60.机械限位可以由例如直线运动机构的限位装置或结构提供,也可以附加机械限位装置或结构,对于刚性限位而言,限位结构或限位装置可以是例如挡板、挡销,还可以是挡块。
61.作为到位检测,以利于与药物合成设备整合,第一止点和第二止点设有用于检测载台是否到位的传感器。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1