一种用于海豚模型逆向设计的3D打印件染色机构的制作方法
一种用于海豚模型逆向设计的3d打印件染色机构
技术领域
1.本实用新型涉及3d打印件的染色技术领域,具体来说,涉及一种用于海豚模型逆向设计的3d打印件染色机构。
背景技术:
2.3d打印即快速成型技术的一种,它是一种以数字模型文件为基础,运用粉末状金属或塑料等可粘合材料,通过逐层打印的方式来构造物体的技术。3d打印通常是采用数字技术材料打印机来实现的。常在模具制造、工业设计等领域被用于制造模型,后逐渐用于一些产品的直接制造,已经有使用这种技术打印而成的零部件。该技术在珠宝、鞋类、工业设计、建筑、工程和施工(aec)、汽车,航空航天、牙科和医疗产业、教育、地理信息系统、土木工程、枪支以及其他领域都有所应用。
3.在海豚模型逆向设计过程中通常还需要对3d打印出的海豚模型进行染色,由于海豚模型外部轮廓的不规则性,在使用3d打印的染色装置对海豚模型进行自动染色时,由于喷头无法根据模型的外部轮廓进行调节,使得模型的有些部位距离喷头较近染色就会比较深,模型的有些部位距离喷头较远染色就会比较浅,这就导致模型染色不均匀。
4.针对相关技术中的问题,目前尚未提出有效的解决方案。
技术实现要素:
5.本实用新型的目的在于提供一种用于海豚模型逆向设计的3d打印件染色机构,以解决上述背景技术中提出的问题。
6.为实现上述目的,本实用新型提供如下技术方案:一种用于海豚模型逆向设计的3d打印件染色机构包括底板,所述底板上端固定有箱体,所述箱体上端固定有顶板,所述箱体正面安装有双开门,所述箱体内设有数量为四个的第一丝杆,第一丝杆的两端分别通过轴承与顶板和底板可转动连接,所述第一丝杆外壁均螺纹传动连接有第一螺纹筒,所述第一螺纹筒之间固定有第一矩形框,所述第一矩形框的外壁固定有若干电动推杆,所述电动推杆的伸缩杆均延伸至第一矩形框内部且固定有雾化喷头,所述第一丝杆上端均连接有第一电机,且第一电机固定在顶板上方,所述箱体内设有用于测量模型外轮廓尺寸的扫描机构,所述箱体上端设有废气处理机构。
7.进一步的,所述扫描机构包括第二矩形框,第一矩形框的四个角均固定有第二螺纹筒,第二螺纹筒内均螺纹传动连接有第二丝杆,第二丝杆的两端分别通过轴承与顶板和底板可转动连接,第二丝杆上端连接有第二电机,第二电机固定在顶板上方,第一矩形框固定嵌设有若干与雾化喷头相适配的红外测距传感器。
8.进一步的,所述底板上端固定有数量为四个的固定板,且固定板外壁均固定有用于贴合红外测距传感器测量端的密封片,当第二矩形框移动到最下端时,第二矩形框的内壁以及红外测距传感器的测量端能够与密封片贴合。
9.进一步的,所述底板上端固定有若干垫板,垫板上端固定有废液收集盒,废液收集
盒上端固定有放置板,利用废液收集盒能够对模型上流淌下来的染液进行收集,放置板用于放置待染色的模型。
10.进一步的,所述废气处理机构包括排气筒,顶板中部固定嵌设有排气筒,排气筒上方设有网筒,网筒上方设有风机,风机、网筒和排气筒之间通过螺栓进行固定,网筒底端设有活性炭吸附颗粒,网筒上端设有hepa滤芯,箱体侧壁固定嵌设有若干进气筒,能够在染色完成后利用风机将箱体内的空气抽出并利用活性炭吸附颗粒和hepa滤芯对排出的空气进行吸附和过滤处理。
11.进一步的,所述进气筒远离箱体的一端均安装有单向阀,通过设置单向阀能够防止在染色的过程中箱体内的空气从进气筒排出。
12.与现有技术相比,本实用新型具有以下有益效果:
13.1、本实用新型能够通过控制第一矩形框和雾化喷头由上往下平移完成模型的染色,并且能够利用扫描机构对模型的外部轮廓进行扫描,从而能够在雾化喷头向下平移的过程中根据扫描结果控制雾化喷头与模型之间的距离,使得雾化喷头始终与模型保持合适的距离,使得模型染色较为均匀,并且染色效果好;
14.2、本实用新型能够通过控制第二矩形框和红外测距传感器由上往下进行平移,从而能够利用红外测距传感器对模型的外部轮廓进行距离扫描,从而能够根据距离信息动态的控制电动推杆进行伸缩对雾化喷头的位置进行调节。
附图说明
15.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
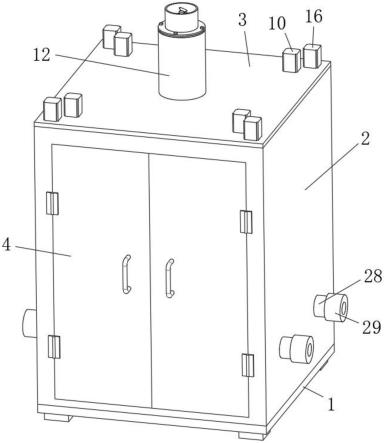
16.图1是根据本实用新型实施例的一种用于海豚模型逆向设计的3d打印件染色机构的结构示意图;
17.图2是根据本实用新型实施例的一种用于海豚模型逆向设计的3d打印件染色机构的剖视图;
18.图3是根据本实用新型实施例的一种用于海豚模型逆向设计的3d打印件染色机构中第一矩形框的结构示意图;
19.图4是根据本实用新型实施例的一种用于海豚模型逆向设计的3d打印件染色机构中第二矩形框的结构示意图;
20.图5是根据本实用新型实施例的一种用于海豚模型逆向设计的3d打印件染色机构中第二矩形框移动到最下端的结构示意图;
21.图6是根据本实用新型实施例的一种用于海豚模型逆向设计的3d打印件染色机构中废气处理机构的剖视图。
22.附图标记:
23.1、底板;2、箱体;3、顶板;4、双开门;5、第一丝杆;6、第一螺纹筒;7、第一矩形框;8、电动推杆;9、雾化喷头;10、第一电机;11、扫描机构;12、废气处理机构;13、第二矩形框;14、第二螺纹筒;15、第二丝杆;16、第二电机;17、红外测距传感器;18、固定板;19、密封片;20、
垫板;21、废液收集盒;22、放置板;23、排气筒;24、网筒;25、风机;26、活性炭吸附颗粒;27、hepa滤芯;28、进气筒;29、单向阀。
具体实施方式
24.下面,结合附图以及具体实施方式,对实用新型做出进一步的描述:
25.实施例:
26.请参阅图1-6,根据本实用新型实施例的一种用于海豚模型逆向设计的3d打印件染色机构,包括底板1,所述底板1上端固定有箱体2,所述箱体2上端固定有顶板3,所述箱体2正面安装有双开门4,所述箱体2内设有数量为四个的第一丝杆5,第一丝杆5的两端分别通过轴承与顶板3和底板1可转动连接,所述第一丝杆5外壁均螺纹传动连接有第一螺纹筒6,所述第一螺纹筒6之间固定有第一矩形框7,所述第一矩形框7的外壁固定有若干电动推杆8,所述电动推杆8的伸缩杆均延伸至第一矩形框7内部且固定有雾化喷头9,所述第一丝杆5上端均连接有第一电机10,且第一电机10固定在顶板3上方,所述箱体2内设有用于测量模型外轮廓尺寸的扫描机构11,所述箱体2上端设有废气处理机构12,能够通过控制第一矩形框7和雾化喷头9由上往下平移完成模型的染色,并且能够利用扫描机构11对模型的外部轮廓进行扫描,从而能够在雾化喷头9向下平移的过程中根据扫描结果控制雾化喷头9与模型之间的距离,使得雾化喷头9始终与模型保持合适的距离,使得模型染色较为均匀,并且染色效果好。
27.在进一步的实施例中,所述扫描机构11包括第二矩形框13,第一矩形框7的四个角均固定有第二螺纹筒14,第二螺纹筒14内均螺纹传动连接有第二丝杆15,第二丝杆15的两端分别通过轴承与顶板3和底板1可转动连接,第二丝杆15上端连接有第二电机16,第二电机16固定在顶板3上方,第一矩形框7固定嵌设有若干与雾化喷头9相适配的红外测距传感器17,能够通过控制第二矩形框13和红外测距传感器17由上往下进行平移,从而能够利用红外测距传感器17对模型的外部轮廓进行距离扫描,从而能够根据距离信息动态的控制电动推杆8进行伸缩对雾化喷头9的位置进行调节。
28.在进一步的实施例中,所述底板1上端固定有数量为四个的固定板18,且固定板18外壁均固定有用于贴合红外测距传感器17测量端的密封片19,当第二矩形框13移动到最下端时,第二矩形框13的内壁以及红外测距传感器17的测量端能够与密封片19贴合,从而能够有效的防止在染色过程中红外测距传感器17的测量端被染色而影响测距功能。
29.在进一步的实施例中,所述底板1上端固定有若干垫板20,垫板20上端固定有废液收集盒21,废液收集盒21上端固定有放置板22,利用废液收集盒21能够对模型上流淌下来的染液进行收集,并定期对废液收集盒21内的废液进行清理,放置板22用于放置待染色的模型,以防止模型的底端被废液浸泡。
30.在进一步的实施例中,所述废气处理机构12包括排气筒23,顶板3中部固定嵌设有排气筒23,排气筒23上方设有网筒24,网筒24上方设有风机25,风机25、网筒24和排气筒23之间通过螺栓进行固定,网筒24底端设有活性炭吸附颗粒26,网筒24上端设有hepa滤芯27,箱体2侧壁固定嵌设有若干进气筒28,能够在染色完成后利用风机25将箱体2内的空气抽出并利用活性炭吸附颗粒26和hepa滤芯27对排出的空气进行吸附和过滤处理,从而能够防止打开双开门4取出模型时箱体2内的有害气体直接被排放到工作环境中,从而能够对工作环
境进行有效的保护。
31.在进一步的实施例中,所述进气筒28远离箱体2的一端均安装有单向阀29,通过设置单向阀29能够防止在染色的过程中箱体2内的空气从进气筒28排出。
32.为了方便理解本实用新型的上述技术方案,以下就本实用新型在实际过程中的工作原理或者操作方式进行详细说明。
33.在实际应用时,将第一电机10、第二电机16、电动推杆8、红外测距传感器17和风机25连接至工控机上,并将雾化喷头9通过软管连接至连接有染料箱的喷涂泵的输出端,并将该喷涂泵与上述工控机连接,使得喷涂泵工作时能够从雾化喷头9喷出染料,将待染色的模型放置到放置板22上并关闭双开门4,然后控制第二电机16工作驱动第二丝杆15同步转动,从而通过第二螺纹筒14驱动第二矩形框13以恒定的速度向下移动,在第二矩形框13向下移动的过程中红外测距传感器17能够实时测量其与模型外轮廓之间的距离并将检测到的信息传输给工控机,第二矩形框13移动到最底端后,第二矩形框13的内壁以及红外测距传感器17的测量端能够与密封片19贴合,从而能够有效的防止在染色过程中红外测距传感器17的测量端被染色而影响测距功能,然后控制第一电机10工作驱动第一丝杆5同步转动,从而通过第二螺纹筒14驱动第一矩形框7以恒定的速度向下移动,并且第一矩形框7的移动速度与第二矩形框13的移动速度相同,并且工控机能够根据红外测距传感器17检测到的信息实时且独立的控制电动推杆8进行伸缩,使得电动推杆8能够带动雾化喷头9进行伸缩,以使得雾化喷头9与模型之间始终保持合适的距离,同时喷涂泵工作将染料雾化后从雾化喷头9喷出,从而能够使得模型染色较为均匀,并且染色效果好,在染色完成后,利用风机25将箱体2内的空气抽出并利用活性炭吸附颗粒26和hepa滤芯27对排出的空气进行吸附和过滤处理,以除去有害物质,从而能够防止打开双开门4取出模型时箱体2内的有害气体直接被排放到工作环境中,从而能够对工作环境进行有效的保护。
34.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1