一种刚柔耦合驱动狭小空间内表面喷涂机器人的制作方法
1.本实用新型涉及机器人领域,具体涉及一种刚柔耦合驱动狭小空间内表面喷涂机器人。
背景技术:
2.传统的喷涂机器人一般整体采用刚性结构,驱动方式主要分为直角坐标式机器人与关节式机器人。直角坐标系机器人运动相对简单、独立、无耦合,因此占地面积大,动作范围小,且末端执行器多为直线运动机构配合导向机构,执行器运动多为行程单一的线性运动,一般用于完成例如外墙体表面等简单表面的喷涂作业,无法承担复杂表面的工作;关节式机器人依靠肩关节、肘关节进行定位,腕关节进行定向,动作灵活且复杂,工作空间大,适用于各种较复杂的表面喷涂作业,但由于其末端执行器采用的也是刚性机构,如弯折机构、多滑轨组件、多旋转组件的组合机构,往往结构复杂、装配成本高,用于狭小空间复杂内表面的喷涂作业较为笨拙。
技术实现要素:
3.本实用新型的目的在于克服上述弊端提供一种刚柔耦合驱动狭小空间内表面喷涂机器人。
4.为实现上述目的,本实用新型采用了以下技术方案:包括末端执行机构、与末端执行机构相连的驱动机构以及与驱动机构相连的关节模组;
5.所述的末端执行机构包括与驱动机构相连的过渡接头、与过渡接头相连的柔性体以及与柔性体相连的喷头,所述的柔性体由第一柔性体和第二柔性体组成,所述的过渡接头用于连接驱动机构与第一柔性体,所述的喷头通过喷头连接件与第二柔性体相连;
6.所述的驱动机构包括直线电机、连接直线电机与柔性体的柔索,所述的直线电机驱动柔索伸长或缩短以带动柔性体实现弯曲;
7.所述的关节模组包括依次连接的第一转动关节、第二转动关节、第三伸缩关节、第四转动关节、第五伸缩关节、第六转动关节、第七转动关节以及第八转动关节,其中:第一转动关节与底座相连,第三伸缩关节呈纵向设置,第五伸缩关节呈横向布置,第八转动关节与驱动机构相连。
8.所述的第一柔性体由多个连续设置的第一球体关节串联而成,所述的第二柔性体由多个连续设置的第二球体关节串联而成,所述柔性体的内部为中空腔体,所述的中空腔体内贯穿有弹性橡胶管。
9.所述的第一球体关节沿其周向均布有第一柔索孔、第二柔索孔、第三柔索孔、第四柔索孔、第五柔索孔、第六柔索孔、第七柔索孔及第八柔索孔,所述的第二球体关节沿其周向均布有与第一柔索孔同轴的第九柔索孔、与第三柔索孔同轴的第十柔索孔、与第五柔索孔同轴的第十一柔索孔以及与第七柔索孔同轴的第十二柔索孔;所述的柔索设置八根,由第一柔索、第二柔索、第三柔索、第四柔索、第五柔索、第六柔索、第七柔索及第八柔索组成,
其中:第一柔索、第三柔索、第五柔索、第七柔索贯穿连接第一柔性体和第二柔性体,第二柔索、第四柔索、第六柔索、第八柔索贯穿连接第一柔性体;所述的直线电机共设置八组,分别与八根柔索相配合。
10.所述的驱动机构包括壳体,所述壳体的内部沿其轴向依次平行布置有第三面板、第二面板及第一面板,所述的直线电机通过电机卡板固定在第三面板上,且直线电机通过电机接头连接柔索;
11.所述的驱动机构还包括设置在第二面板上的第二滑轮组及设置在第一面板上的第一滑轮组,所述的第一滑轮组及第二滑轮组分别设置四组,四组第一滑轮组分别与第一柔索、第三柔索、第五柔索、第七柔索相配合,四组第二滑轮组分别与第二柔索、第四柔索、第六柔索、第八柔索相配合。
12.所述的第三面板通过圆柱面上的螺纹孔与壳体螺钉连接,所述的第二面板通过第二连接柱与第三面板相连,所述的第一面板通过第一连接柱与第二面板相连,其中:第一面板与第二面板之间的间距为180mm,第二面板与第三面板之间的间距为200mm,第一面板、第二面板、第三面板的直径均为200mm。
13.所述的第三伸缩关节包括通过丝杠螺母机构形成滑动配合的伸缩外臂与伸缩内臂,所述的丝杠螺母机构包括丝杠、驱动丝杠转动的伺服电机以及与丝杠相配合的丝杠螺母,所述的伺服电机位于电机套内,伺服电机的输出轴贯穿电机法兰盘设置并通过联轴器与丝杠的一端连接,电机套、电机法兰盘及伸缩外臂通过螺栓连接固定;所述的丝杠通过一对带座轴承固定在支架上,所述支架的一端与电机法兰盘固定,所述的丝杠螺母与套设在丝杠上的螺母座相固定,所述的螺母座与伸缩内臂的内壁固连。
14.所述支架的两侧还分别设有沿第三伸缩关节轴向设置的支承导轨,所述的支撑导轨上设有与其相配合的滑块,所述的滑块与伸缩内臂的内壁相固定。
15.由上述技术方案可知,本实用新型采用关节式机器人大臂结构,整体能够实现大空间8关节的折展、伸缩运动,并且末端执行机构可实现4自由度运动,与刚性机构相比,连续柔性体结构简单、体积轻便,并且运动依靠柔索伸缩使柔性体弯曲,运动方式多样、作业精度高,能够实现复杂曲面的喷涂作业,特别是狭小空间内表面的喷涂作业。
附图说明
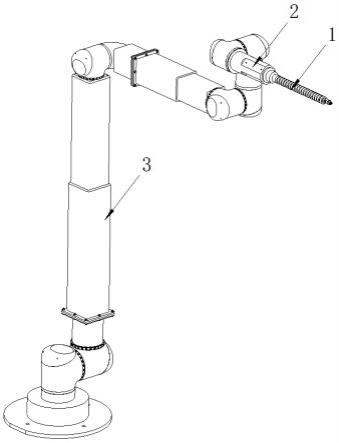
16.图1是本实用新型的结构示意图。
17.图2是本实用新型末端执行机构的结构示意图。
18.图3是本实用新型第二柔性体与柔索的配合示意图。
19.图4是本实用新型柔索与柔性体的配合示意图。
20.图5是本实用新型末端执行机构与驱动机构的结构示意图。
21.图6是本实用新型驱动机构去除一半壳体后的内部结构示意图。
22.图7是本实用新型驱动机构的结构示意图。
23.图8是本实用新型第三伸缩关节的结构示意图。
24.图9是图8的内部结构示意图。
25.图10是图8中丝杠螺母机构的分解结构示意图。
26.图11是本实用新型关节模组的结构示意图。
27.上述附图中的标记为:末端执行机构1、过渡接头11、喷头12、第一柔性体13、第一球体关节131、第二柔性体14、第二球体关节141、喷头连接件15、弹性橡胶管16、驱动机构2、直线电机21、壳体22、第三面板23、第二面板24、第二连接柱241、第一面板25、第一连接柱251、电机卡板26、电机接头27、第二滑轮组28、第一滑轮组29、关节模组3、底座30、第一转动关节31、第二转动关节32、第三伸缩关节33、伸缩外臂331、伸缩内臂332、丝杠333、带座轴承3331、伺服电机334、丝杠螺母335、螺母座3351、电机套336内、电机法兰盘337、联轴器338、支架339、支承导轨3391、滑块3392、第四转动关节34、第五伸缩关节35、第六转动关节36、第七转动关节37、第八转动关节38、第一柔索391、第二柔索392、第三柔索393、第四柔索394、第五柔索395、第六柔索396、第七柔索397、第八柔索398。
具体实施方式
28.下面结合附图对本实用新型做进一步说明:
29.如图1所示的一种刚柔耦合驱动狭小空间内表面喷涂机器人,包括末端执行机构1、与末端执行机构1相连的驱动机构2以及与驱动机构2相连的关节模组3。
30.具体的,如图2、图3、图4所示,末端执行机构1包括与驱动机构2相连的过渡接头11、与过渡接头11相连的柔性体以及与柔性体相连的喷头12。柔性体由第一柔性体13和第二柔性体14组成,第一柔性体13和第二柔性体14通过柔索串联成一体,第一柔性体13由多个连续设置的第一球体关节131串联而成,第二柔性体14由多个连续设置的第二球体关节141串联而成,第一球体关节131与第二球体关节141的结构相同,球体关节的一端是球面,一端是梯形内腔,相邻的两个球体关节的球面与梯形内腔相配合。本实施例中,各球体关节的厚度以及相邻球体关节的间距都为10mm。
31.优选的,柔性体的内部为中空腔体,中空腔体内贯穿有弹性橡胶管16,即弹性橡胶管16从柔性体的中央空腔通过以保证相邻球体关节的紧密接触。
32.过渡接头11用于连接驱动机构2与第一柔性体13,过渡接头11上设有8个内孔分别用于8根柔索的穿线,过渡接头11的末端设有4个外伸平台与驱动机构2的壳体22通过螺钉连接,喷头12通过喷头连接件15与第二柔性体14相连。
33.第一球体关节131沿其周向均布有第一柔索孔、第二柔索孔、第三柔索孔、第四柔索孔、第五柔索孔、第六柔索孔、第七柔索孔及第八柔索孔,第二球体关节141沿其周向均布有与第一柔索孔同轴的第九柔索孔、与第三柔索孔同轴的第十柔索孔、与第五柔索孔同轴的第十一柔索孔以及与第七柔索孔同轴的第十二柔索孔;上述各柔索孔的直径均为5mm。柔索设置八根,由第一柔索391、第二柔索392、第三柔索393、第四柔索394、第五柔索395、第六柔索396、第七柔索397及第八柔索398组成,其中:第一柔索391、第三柔索393、第五柔索395、第七柔索397贯穿连接第一柔性体13和第二柔性体14,第二柔索392、第四柔索394、第六柔索396、第八柔索398贯穿连接第一柔性体13。
34.具体的,如图5、图6、图7所示,驱动机构2包括直线电机21、连接直线电机21与柔性体的柔索,直线电机21驱动柔索伸长或缩短以带动柔性体实现弯曲;直线电机21共设置八组,分别与八根柔索相配合。
35.驱动机构2包括壳体22,壳体22的内部沿其轴向依次平行布置有第三面板23、第二面板24及第一面板25,第三面板23通过圆柱面上的螺纹孔与壳体22螺钉连接,第二面板24
通过第二连接柱241与第三面板23相连,第一面板25通过第一连接柱251与第二面板24相连。本实施例中:第一面板25与第二面板24之间的间距为180mm,第二面板24与第三面板23之间的间距为200mm,第一面板25、第二面板24、第三面板23的直径均为200mm。
36.直线电机21沿第三面板23的圆周方向布置,并且直线电机21通过电机卡板26固定在第三面板23上,直线电机21的输了端通过电机接头27连接柔索。驱动机构2还包括设置在第二面板24上的第二滑轮组28及设置在第一面板25上的第一滑轮组29,第一滑轮组29及第二滑轮组28分别设置四组,四组第一滑轮组29分别与第一柔索391、第三柔索393、第五柔索395、第七柔索397相配合,四组第二滑轮组28分别与第二柔索392、第四柔索394、第六柔索396、第八柔索398相配合。本实施例中,第一滑轮组29及第二滑轮组28中的滑轮支座与面板为一体式结构,省去了传统滑轮支座的安装环节,避免了装配误差,结构与以往相比更为简便,且提高了柔索的导向精度。
37.具体的,如图11所示,关节模组3包括依次连接的第一转动关节31、第二转动关节32、第三伸缩关节33、第四转动关节34、第五伸缩关节35、第六转动关节36、第七转动关节37以及第八转动关节38,其中:第一转动关节31与底座30相连,第三伸缩关节33呈纵向设置,第五伸缩关节35呈横向布置,第八转动关节38与驱动机构2相连。关节模组3可以实现大空间8关节的折展、伸缩运动。
38.上述各转动关节均为一体化的关节模组,谐波减速器、伺服电机、编码器等都包含在关节模组中。本实施例中,第一转动关节31及第二转动关节32为直径430mm型模组,第四转动关节34、第六转动关节、第七转动关节使用的是直径340mm型模组,第三伸缩关节33的伸缩外臂长1750mm,伸缩内臂长达1500mm,完全伸展可达3120mm长,伸缩关节35的伸缩外臂长1100mm,伸缩内臂长达910mm,完全伸展可达1890mm长,整体最大的臂展为8米。
39.第三伸缩关节33与第五伸缩关节35的结构相同,以第三伸缩关节为例:如图8、图9、图10所示,第三伸缩关节33包括通过丝杠螺母机构形成滑动配合的伸缩外臂331与伸缩内臂332,本实施例中,伸缩外臂331与伸缩内臂332均为方形伸缩臂,丝杠螺母机构包括丝杠333、驱动丝杠333转动的伺服电机334以及与丝杠333相配合的丝杠螺母335,伺服电机334位于电机套336内,伺服电机334的输出轴贯穿电机法兰盘337设置并通过联轴器338与丝杠333的一端连接,电机套336、电机法兰盘337及伸缩外臂331通过螺栓连接固定;丝杠333通过一对带座轴承3331固定在支架339上,支架339的一端与电机法兰盘337固定,丝杠螺母335与套设在丝杠333上的螺母座3351相固定,螺母座3351与伸缩内臂332的内壁固连。
40.支架339的两侧还分别设有沿第三伸缩关节33轴向设置的支承导轨3391,支撑导轨3391上设有与其相配合的滑块3392,滑块3392与伸缩内臂332的内壁相固定,支撑导轨3391起导向作用。
41.伺服电机334驱动丝杠333转动,同时带动丝杠螺母335及螺母座3351运动,进而实现与螺母座3351相连的伸缩内臂332实现直线移动,移动过程中由支撑导轨3391与滑块3392实现导向定位。本实用新型采用丝杠螺母机构与方形伸缩臂的结构不仅便于安装,且运动精度更加可靠。
42.本实施例中,各柔索的连接及走向如下:
43.第一柔索391、第三柔索393、第五柔索395、第七柔索397的连接方式相同。以第一柔索为例:第一柔索391的一端与直线电机21相连,第一柔索391的另一端绕经第一滑轮组
29后依次经过过渡接头11上相对应的内孔、第一柔性体13上的第一柔索孔、第二柔性体14上的第九柔索孔,并通过不锈钢卡节与第二柔性体14的末端球体关节固定。
44.第二柔索392、第四柔索394、第六柔索396、第八柔索398的连接方式相同。以第二柔索392为例:第二柔索392的一端与直线电机21相同,第二柔索392的另一端绕经第二滑轮组28后依次经过过渡接头11上相对应的内孔、第一柔性体13上的第二柔索孔,并通过不锈钢卡节与第一柔性体13的末端球体关节固定。
45.第一柔索与第五柔索的收放配合可以使整个柔性体实现俯仰方向的弯曲自由度,第三柔索与第七柔索的收放配合可以使整个柔性体实现左右方向的弯曲自由度。第二柔索与第六柔索的配合可以使第一柔性体实现右上45度及左下45度的弯曲自由度,第四柔索与第八柔索的收放配合可以使第一柔性体实现左上45度及右下45度的弯曲自由度,即本实用新型中的机器人可实现四个方向的弯曲自由度。
46.本实用新型的有益效果如下:
47.1、本实用新型的末端执行机构具有4个运动自由度,关节模组中的八个关节构成8个冗余自由度,高冗余自由度所能提供的位姿方式更多,对于喷涂作业的复杂的工作环境,运动方案更多。
48.2、本实用新型中用于牵引柔索的直线电机与滑轮组的布置形式为分层布置方式,有利于使柔索牵引、导向方向一致,并使驱动机构的结构更为紧凑,相比于以往的索轮布置形式,避免需要额外的导向装置与产生额外的摩擦损耗,同时避免了柔索之间的干涉。
49.3、本实用新型驱动机构中的柔索导向滑轮支座与导向面板为一体式结构,省去了传统滑轮支座的安装环节,避免了装配误差,结构与以往相比更为简便,且提高了柔索的导向精度。
50.4、本实用新型采用方形伸缩臂以及滚珠丝杠模组实现水平移动自由度,传动精度高、便于加工与安装。
51.5、本实用新型选择一体化机器人关节模组构成大臂的折展、伸缩运动,与传统液压驱动方式相比,集成度高、运动自由度高、体积轻便,且兼容性强。
52.以上所述的实施例仅仅是对本实用新型的优选实施方式进行描述,并非对本实用新型的范围进行限定,在不脱离本实用新型设计精神的前提下,本领域普通技术人员对本实用新型的技术方案作出的各种变形和改进,均应落入本实用新型权利要求书确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1