实验室用球磨机的制作方法
本技术涉及实验室用球磨机,该球磨机特别地是振动式磨机、离心式球磨机或行星式球磨机,该球磨机更特别地是具有1:-1的传动比的行星式球磨机,该球磨机具有:用于至少一个研磨用碗状件的至少一个研磨用碗状件保持器,该研磨用碗状件保持器被布置在球磨机的在球磨机的研磨操作期间移动的移动的机器部分上;夹持装置,该夹持装置被布置在移动的机器部分上,以用于将夹持力和/或夹持扭矩传递至研磨用碗状件以及/或者将夹持力和/或夹持扭矩传递至研磨用碗状件保持器;以及具有至少一个联接元件的联接装置,其中,从静止的机器部分传递至移动的机器部分以产生夹持力的能量传递是经由联接装置提供的。
背景技术:
1、de 102012009987 a1公开了一种实验室用球磨机,特别地,该实验室用球磨机是实验室规模的行星式或离心式球磨机,该实验室用球磨机可以特别地用于实验室规模的较大的研磨容器,即,通常为160ml、250ml或甚至500ml的研磨容器,并且该实验室用球磨机允许将研磨容器自动夹持至研磨容器保持器。在已知的实验室用球磨机中,承载装置绕竖向中心轴线旋转。已知的磨机具有围绕平行于中心轴线偏移的行星轴线的一个或更多个研磨站,所述一个或更多个研磨站被安装成相对于承载装置旋转。研磨站具有用于至少一个研磨容器的接纳装置或研磨用碗状件保持器,该研磨容器可以填充有待研磨的材料和研磨介质,特别是研磨球。在研磨操作期间,保持装置由承载装置围绕中心轴线被引导,并且保持装置还相对于承载装置——通常,沿相反的方向——绕偏心安装的行星轴线旋转。还设置有用于承载装置的驱动器和用于研磨站的另外的驱动器。
2、具有作为联接元件的偏心轴的机动化驱动器设置成用于将研磨容器自动——即,不通过手动施加夹持力——轴向夹持在保持装置中。夹持是通过使偏心轴旋转而实现的,由此,偏心轴从下方抵靠研磨用碗状件基部而作用。为此,偏心轴被安装在夹持基部的向下延伸的轴颈部中的横向孔中。该轴颈部接合在实验室研磨机的下部基部部分的轴承轴颈部中的匹配的同轴孔中。偏心轴通过滚针轴承将高度变化传递至夹持基部。夹持基部通过弹簧组件将呈压力盘的形式的压力板向上提升。压力板进而将所插入的研磨用碗状件提升成抵靠研磨用碗状件上方的压力轭,直到夹持系统中的所有轴向间隙都被消除为止,压力轭用作研磨用碗状件盖的止动件。偏心轴移动超出偏心轴的拐点,以在夹持状态下产生自锁。
3、研磨容器是由马达张紧的。为此,已知的球磨机具有固定至承载装置外部的静止的装置壳体的马达。马达对驱动轴进行驱动,该驱动轴在该驱动轴的内端部处开有槽,以便当研磨站搁置在特定的插入和移除位置中且处于正确的旋转取向时联接至横向附接至偏心轴的横向销。在槽联接件被联接的情况下,偏心轴可以经由马达而旋转,以自动地将研磨容器轴向夹持或自动地再次释放夹持。因此,偏心轴仅将能量从静止的机器部分上的机动化驱动器传递至移动的机器部分上的夹持机构,以在联接件被接合时产生夹持力。
4、对研磨用碗状件的自动张紧的优点是:在松开对张紧机构的夹持时产生的力不必由使用者施加,而是由张紧马达自动地施加。此外,对研磨用碗状件的自动张紧使得使用者的舒适度提高,并且使得能够针对每个张紧过程施加相同的且因此可再现的张紧力。此外,可以提高防止不正确操作的安全性。
5、在已知的球磨机中提供的对研磨用碗状件的自动张紧具有许多缺点:将偏心轴联接至驱动马达需要研磨站在磨机静止时精确的旋转取向。由于磨损和/或污染,可能无法实现用于联接所需的精确的旋转取向,从而使得难以将偏心轴联接至马达的驱动轴。在研磨用碗状件张紧期间产生的偏心轴的自锁意在确保:对研磨用碗状件的张紧在研磨操作期间不会无意地松动。然而,磨损会导致拐点的位置发生变化,从而意味着:可能无法再保证防止对研磨用碗状件的张紧发生无意松动的安全性。对于联接过程而言,马达和偏心轴相对于彼此的布置和对准还意味着:研磨机不是非常紧凑的。另一方面,在已知的磨机中的对研磨用碗状件的自动张紧是复杂的设计解决方案。来自马达的能量或力经由偏心轴以及与偏心轴相互作用的张紧装置的其他部件的传递需要具有高部件重量的力传递元件的相应的牢固设计,使得也在研磨操作期间移动的部件在研磨操作期间会经历较高的离心力,并且轴承和驱动器负载高。
技术实现思路
1、本实用新型的目的是提供一种开头提到的类型的实验室用球磨机,该实验室用球磨机特别地被设计为实验室振动式磨机且具有对研磨用碗状件进行自动张紧的可能性,在实验室用球磨机中,对研磨用碗状件的张紧通过质轻且紧凑设计的实验室用球磨机而以结构上简单的方式实现。
2、此外,还应当保证较高的防错水平,以防止对研磨用碗状件的夹持无意松动。
3、特别地,研磨用碗状件的自动张紧系统的设计应当使得可以对不同几何形状的研磨用碗状件进行张紧,特别是对具有不同的研磨用碗状件高度的研磨用碗状件进行张紧。
4、上述任务是通过本技术所提供的球磨机来解决的。
5、根据从de 102012009987 a1获知的磨机,在根据本实用新型的磨机中还设置有联接元件,驱动能量或驱动力从磨机的静止的机器部分经由该联接元件被传递至在磨机的研磨操作期间移动的机器部分,以产生用于对研磨用碗状件进行自动张紧所需的夹持力。然而,与已知的磨机相比,本实用新型提供了:联接元件在研磨操作期间(也)机械地联接或连接至静止的机器部分并联接或连接至移动的机器部分。优选地,联接元件与能量产生单元——特别是机动化驱动器——的永久、连续、连续、不间断、可非破坏性分离联接和/或永久的连接件设置在球磨机上和/或球磨机的静止的机器部分上并且设置至球磨机的移动的机器部分。根据本实用新型的研磨用碗状件的自动张紧系统的设计可以有利地实现,特别是在振动式磨机的情况下有利地实现。
6、特别地,可以独立于研磨用碗状件保持器的运动状态、此外特别地独立于振动式磨机的与研磨用碗状件保持器连接的摆臂的特定角度位置或者独立于对研磨用碗状件保持器进行引导的承载装置的特定旋转取向,经由联接元件对产生夹持力和/或夹持扭矩所需的力和/或能量进行传递和传输。可以在研磨操作期间和停机时提供经由联接元件进行的优选地机械的联接。特别地,在研磨操作期间的联接允许驱动力或驱动扭矩或驱动能量从磨机的静止的机器部分经由联接元件被传送或传递至移动的机器部分,即使在研磨操作期间也是如此,以便产生夹持力和/或夹持扭矩,即使在研磨操作期间也是如此。然而,原则上,本实用新型还允许仅当磨机静止时才传递驱动力或驱动扭矩或驱动能量。因而,在这种情况下,可以设置机械装置例如安全离合器,以便在研磨操作期间独立于经由联接元件进行力和/或能量的传递而维持研磨用碗状件的张紧状态。
7、为了产生夹持力和/或夹持扭矩,根据本实用新型的磨机的夹持装置可以例如以本身已知的方式具有主轴传动装置,由此从联接装置传递至夹持装置的扭矩被转换为带螺纹的主轴或推杆的平移的调节运动。
8、根据本实用新型的实验室用磨机的联接装置被设置并设计成将能量以及/或者力或扭矩从磨机的静止的机器部分传递至在研磨操作期间移动的机器部分。除了联接元件之外,联接装置还可以具有另外的部件和装置,例如,在联接装置的驱动侧上且分配给静止的机器部分的至少一个驱动轮和/或在联接装置的输出侧上且分配给移动的机器部分的至少一个输出轮。然后,由输出轮产生的扭矩可以使用主轴装置被转换成带螺纹的主轴或推杆的平移运动。然而,还可以通过对来自联接元件的驱动能量和/或驱动力进行传递来对联接装置的部件——例如可调节的活塞元件——进行横向调节或移动,从而产生可以直接或间接地传递至研磨用碗状件的轴向夹持力。
9、在研磨操作期间,球磨机的移动的机器部分与静止的机器部分之间发生相对运动。例如,在振动式磨机的研磨操作期间,摇杆之间发生相对于静止的磨机结构的相对运动,在摇杆上设置有研磨用碗状件保持器。由于离心式球磨机或行星式球磨机的功能,在离心式球磨机或行星式球磨机中也会发生球磨机的移动的机器部分与静止的机器部分之间的相对运动。根据本实用新型,相对运动可以优选地仅通过联接元件来均衡。特别优选的是,这种均衡无需技术上接合的部件来作为联接元件的刚性部件或与能够以预定方式移动的部分之间的连接件。然而,为了对相对运动进行补偿,联接元件可以被设计成能够至少在特定区域中在多个维度上移动。在本文中,相对于在传递夹持扭矩和/或夹持力时联接元件的运动方向,联接元件可以具有在每种情况下均垂直于主运动方向的至少两个自由度的运动;特别优选地,联接元件具有正交于主运动方向的自由运动。下面使用本实用新型的实施方式的示例对此进行更详细地描述。因此,根据本实用新型的对研磨用碗状件的自动夹持的实施方式可以有利地实现、特别是在振动式磨机中有利地实现,其中,通过联接元件的可动性,在紧固有研磨用碗状件保持器的振动式磨机的研磨操作期间发生的振动可以相对于振动式磨机的静止(壳体)部分而得到补偿。这允许以结构上简单的方式避免与部件故障风险相关联的相关部件应力的出现。
10、本实用新型的第一且优选的实施方式涉及动能从布置在静止的机器部分上的机动化驱动器经由联接元件机械传递或传送至移动的机器部分。夹持力和/或夹持扭矩通过马达驱动器以分散的方式产生,该马达驱动器在球磨机的研磨操作期间布置在固定位置。马达功率能够通过研磨用碗状件保持器上的联接件的适当设计获得。用于对研磨用碗状件进行自动张紧所需的部件可以采用紧凑且轻量化的设计。由于较小的部件质量,球磨机的移动的机器部分上的较高负载是可能的和/或用于在研磨操作期间使移动的机器部分移动的驱动器上的负载较低。较小的部件质量意味着:移动的机器部分上的用于对研磨用碗状件进行自动张紧所需的部件在研磨过程期间经受较低的离心力,并且可以设计得更精密。
11、优选地,联接元件可以是具有用于机械运动或动力传递的特定的形状配合式牵引装置传动件的牵引装置。机动化驱动器的至少一个驱动轮或驱动轴可以设置在联接装置的驱动侧上并且因此设置在静止的机器部分上并且至少一个输出轮或输出轴可以设置在联接装置的输出侧上或者设置在移动的机器部分上,以用于通过联接元件传递运动或力。驱动扭矩从机动化驱动器经由驱动轮、特别是齿轮或齿轮装置而被传递,并且输出的扭矩经由输出轮、特别是齿轮或齿轮装置被直接或间接传递至夹持装置。例如,输出的扭矩可以使用主轴装置被转换成用于对研磨用碗状件进行夹持所需的夹持力。
12、在形状配合锁定式牵引传动件的情况下,链式传动装置的链、或者带齿的带可以被设置为联接元件,以便将扭矩从机动化驱动器的驱动轴传递至牵引装置、或者通过具有相对应的形状配合锁定式轮廓的轮——特别是带齿的轮——将扭矩从牵引装置传递至球磨机的移动的机器部分上的输出轴。原则上,非形状配合式牵引装置传动件的牵引装置也可以设置为联接元件,由此,张紧扭矩通过作用在带和滑轮的接触表面之间的摩擦力而经由传动带被传递。替代性地,具有推动装置的推动链传动件可以设置为用于传递运动或力的联接元件。
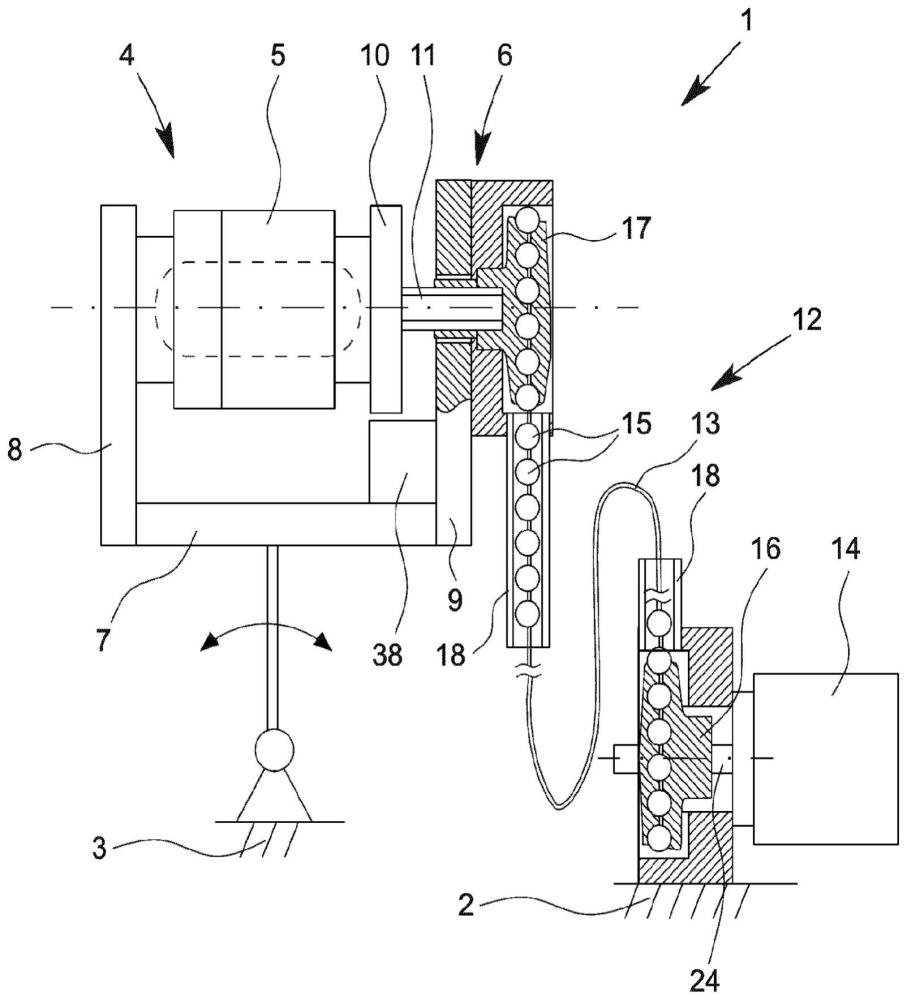
13、特别优选的实施方式是下述实施方式:在该实施方式中,联接元件被设计为球链或珠链,该球链或珠链具有芯部以及多个球状件或珠状件,所述多个球状件或珠状件附接至芯部、优选地以相同的距离附接至芯部。优选地,设置有珠链传动件,其中,珠链在驱动侧上连接至驱动轮以从机动化驱动器的马达轴传递扭矩,并且珠链在输出侧上连接至输出轮以将扭矩传递至张紧装置。驱动轮和输出轮可以具有绕圆周分布并适于珠链的珠体或球体的凹部。输出扭矩可以使用主轴装置而被转换成用于对研磨用碗状件进行夹持的横向夹持力。珠链使得软管能够在所有空间方向上弯曲,以使得珠链传动件的输出侧的位置可以容易地适应于球磨机内部的结构条件,并且球磨机的紧凑设计可以被实现。
14、用于珠链的软管引导件可以设置在一根或更多根软管中以维持缆索力。软管引导件还具有对珠链的保护功能。优选地,珠链传动件的驱动轮与输出轮之间的软管可以在珠链的整个长度上延伸,使得珠链缠绕在轮之间的每个区域中。驱动轮和/或输出轮可以具有由轮的侧向侧部界定的凹槽形状的延伸表面,该延伸表面在延伸基部中包含有凹部。珠链在轮的区域中被引导在侧部之间。这确保了对珠链的支撑和精确引导,甚至在轮和缠绕区域中的软管引导件附近,也是如此。
15、替代性地,万向轴或至少部分挠性的轴可以被设置为联接元件以在各部分彼此相对移动的情况下进行扭矩传递,并且能够对静止的机器部分与移动的机器部分之间的相对运动进行均衡。
16、联接装置可以具有用于对所传递的驱动扭矩进行扭矩转换的齿轮装置,特别地,联接装置可以在输出侧上具有用于对所传递的驱动扭矩进行扭矩转换的齿轮装置。例如,可以使用行星齿轮来在输出侧上产生更大的扭矩。该齿轮装置可以是自锁的,以使得只能在一个方向上进行旋转运动。在齿轮箱装置与主轴一起工作的情况下,主轴和齿轮箱可以具有自锁设计,以使得确保防止研磨用碗状件的张紧的无意释放,即使力或扭矩从联接元件至输出轮的传递被中断、例如在珠链断裂的情况下被中断也是如此。
17、为了限制力和/或扭矩经由联接元件的传递,可以设置过载保护装置,该过载保护装置可以特别地设计为磁性滑动式离合器和/或特别地布置在联接元件的输出侧上。可以设置具有至少一个传感器的传感器装置,以用于在过载的情况下对离合器分离进行检测、特别是用于对滑动式离合器的滑动进行检测。然后,可以使用控制和/或调节装置来根据检测到的离合器分离对机动化驱动器进行控制和/或调节。
18、为了能够将能量以及/或者力或扭矩为了能够将能量以及/或者力或扭矩从实验室振动式磨机的静止的机器部分传递至不同的移动机器部分、例如两个摇杆,可以设置多个联接装置,所述多个联接装置各自具有至少一个联接元件,其中,从静止的机器部分至两个单独的(在运动方面断开联接的)移动的机器部分的能量传递是经由联接装置提供的,特别地其中,联接装置联接至布置在静止的机器部分上的共用的驱动器以用于将能量从静止的机器部分传递至移动的机器部分,或者联接装置可以经由联接装置联接。使用所述多个联接装置,例如可以使用静止的机器部分上的机动化驱动器来将所需的夹持扭矩传递至振动式磨机的布置在振动式磨机的不同摆臂上的两个夹持装置。每个联接装置可以具有布置在静止的机器部分上的驱动轮,该驱动轮被联接至机动化驱动器的马达轴或者可以经由联接装置联接。扭矩可以经由马达轴被施加至两个驱动轮,由此,扭矩从相应的驱动轮经由分配给驱动轮的联接元件——例如,珠链——而被传递至移动的机器部分上的输出轮。例如,可以实现多个珠链传动件,以将来自静止的机器部分上的马达驱动器的缆索力或夹持扭矩经由两个珠链传递至被安装在不同的移动的机器部分上的输出轮,并且将所传递的扭矩传递至分配给相应的移动的机器部分的夹持装置以用于将研磨用碗状件夹持在相应的机器部分上。特别优选的是,力或扭矩从机动化驱动器经由两个珠链传动件被传递至布置在实验室振动式磨机的不同摇杆上的两个输出轮。这使得能够以简单的方式并且在磨机的紧凑设计——优选地仅具有一个马达驱动器——的情况下在实验室磨机的两个摆臂上实现对研磨用碗状件的自动张紧。
19、这使得可以通过多个联接装置将能量以及/或者力或扭矩从静止的机器部分传递至相同的移动的机器部分。特别地,可以设置两个联接装置,所述两个联接装置各自具有至少一个联接元件,其中,能量从静止的机器部分至相同的移动的机器部分的传递是经由联接装置提供的,特别地,能量从布置在静止的机器部分上的共用的驱动器至相同的移动的机器部分的传递是经由联接装置提供的;此外特别地,能量从静止的机器部分至相同的移动的机器部分的以时间延迟的方式的传递是经由联接装置提供的,特别地,能量从布置在静止的机器部分上的共用的驱动器至相同的移动的机器部分的以时间延迟的方式的传递是经由联接装置提供的;特别地其中,传递至用于对研磨用碗状件进行自动夹持的夹持装置的能量可以经由第一联接装置提供,传递至用于使研磨用碗状件自动旋转的回转传动件的能量可以经由第二联接装置提供。
20、特别地,第一联接装置的第一联接元件可以用于将夹持力或夹持扭矩从球磨机的静止的机器部分传递至研磨用碗状件保持器的夹持装置,以便实现对研磨用碗状件的自动夹持。然后,另一联接装置的另一联接元件可以用于将驱动力和/或驱动扭矩传递至旋转装置以用于使研磨用碗状件旋转,其中,该旋转装置特别地被设置成在研磨操作受控中断并且对研磨用碗状件的夹持至少部分地释放之后旋转。
21、利用多个联接元件,可以将不同大小的力或扭矩从静止的机器部分传递至相同的移动的机器部分、或者甚至传递至不同的移动的机器部分,以便对不同的装置——比如,研磨用碗状件保持器的夹持装置和旋转装置——进行驱动。
22、本实用新型的另外的方面涉及将液压能、气动能或电能从实验室研磨机的静止的机器部分经由相对应的联接元件传递至实验室研磨机的移动的机器部分。
23、例如,用于提供压缩流体——特别是压缩空气——的压缩机或者用于提供液压流体的液压单元可以设置在移动的机器部分上。然后,联接装置在驱动侧上被连接至压缩机或液压单元。压缩流体、特别是压缩空气也可以从储存罐或管网——例如,安装在实验室磨机附近并经由压力管线连接至实验室磨机的加压容器——获取。压缩流体或液压流体优选地在球磨机外部产生,球磨机可以具有与用于压缩流体或液压流体的管网或者与压缩机或液压单元或相对应的压力容器连接的相对应的流体连接件。压缩空气软管或压力管线甚至刚性管道都可以用作用于能量传递的联接元件。为了对移动的机器部分与静止的机器部分之间的相对运动进行补偿,可以提供联接元件的弹性变形和/或可以提供用于密封过渡的至少一个旋转馈通件。
24、在输出侧上,可以设置气动马达或液压马达作为联接装置的一部分,以将液压能或气动能转换成机械功。通过向转子或齿轮施加压力,气动能或液压能可以被转换成旋转能,以使得可以在输出侧上产生用于对研磨用碗状件进行夹持所需的夹持力和/或夹持扭矩。在输出侧上,联接装置可以包括呈旋转叶片或叶片泵的形式的力或能量转换器,由此旋转运动是通过用压缩气体或压缩空气对转子或齿轮加压来产生的。替代性地,可以提供活塞作为移位元件,该移位元件通过压缩气体或压缩空气的加压而以平移的方式移位。这可以用于产生用于对研磨用碗状件进行夹持所需的夹持力和夹持扭矩。然后,转子、齿轮或齿轮装置或调节活塞可以与移动的机器部分上的夹持装置共同协作或者也可以形成夹持装置的一部分,以产生用于对研磨用碗状件进行自动夹持所需的夹持力和/或夹持扭矩。
25、原则上,还可以经由作为联接元件的电力线将电能从静止的机器部分传递至移动的机器部分。例如,致动器可以被承载在研磨用碗状件保持器上,该致动器将电信号转换成机械运动以产生驱动扭矩和/或驱动力,该致动器例如作为对带螺纹的主轴进行驱动和/或使夹持装置的推杆移动并且因此产生轴向夹持力的机电驱动器。致动器可以由实验室磨机的工作电力供应装置而被供以电力。
26、作为动能经由联接元件的机械传递的替代性方案,或者除了动能经由联接元件的机械传递,可以提供将液压能、气动能或电能从静止的机器部分经由联接元件传递至移动的机器部分、特别是研磨用碗状件保持器。当研磨用碗状件被保持在研磨用碗状件保持器中和/或研磨用碗状件保持器上并且研磨用碗状件夹持被释放时,通过相对应的联接元件传递的能量可以被提供为用于对研磨用碗状件进行夹持和/或用于使研磨用碗状件旋转的力和/或扭矩。
- 还没有人留言评论。精彩留言会获得点赞!