一种用于自动固晶机的点胶运动控制系统的制作方法
本发明涉及点胶运动控制,具体涉及一种用于自动固晶机的点胶运动控制系统。
背景技术:
1、固晶一般是通过固晶摆臂将晶圆上的晶片从供晶位吸取,再移动至基板上的固晶位,将晶片精准放置在基板上,并利用点胶机进行点胶,以实现固晶。
2、传统点胶运动控制系统缺乏视觉技术的应用和传感器技术的改进,意味着无法实时获得工件及点胶位置的准确信息,无法对点胶过程进行自动判定和实时质量检测,也无法及时发现漏胶、过胶等问题,导致点胶位置存在偏差,严重影响点胶质量,同时增加了产品不合格的风险。
3、传统点胶运动控制系统多轴联动的缺失限制了系统对复杂、曲面及非规则形状工件的精准点胶,同时也无法根据工艺要求灵活调整点胶路径、速度和压力等点胶参数,影响点胶的适应性和灵活性。由于系统受到较多限制,可能需要频繁地进行人工干预和调整,导致生产效率低下且容易出现操作误差。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术所存在的上述缺点,本发明提供了一种用于自动固晶机的点胶运动控制系统,能够有效克服现有技术所存在的点胶的适应性、灵活性和精准性较差的缺陷。
3、(二)技术方案
4、为实现以上目的,本发明通过以下技术方案予以实现:
5、一种用于自动固晶机的点胶运动控制系统,包括人机交互单元和运动控制单元;
6、人机交互单元,通过点胶软件与硬件电路的结合实现视觉系统的运行、创建并编辑点胶程序、实时监控各系统模块运行状态及数据反馈与分析,将视觉系统处理后的图像与模板进行特征匹配,根据匹配结果自动设置点胶参数并发送至运动控制单元,同时采集点胶过程图像并进行分析,以对点胶参数的设置及点胶过程进行改进;
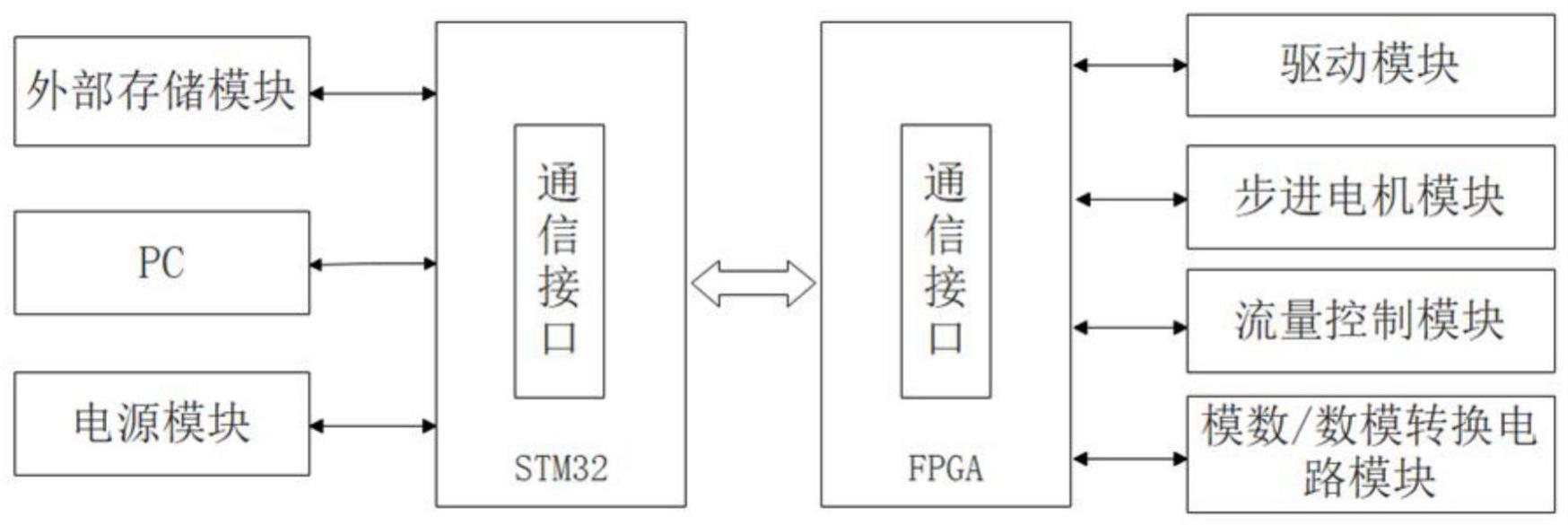
7、运动控制单元,以stm32为主控制器、fpga为辅控制器搭建硬件平台及外部电路,基于点胶参数结合点胶启动条件检测结果驱动步进电机带动点胶器移动至预设点胶位置进行点胶操作。
8、优选地,所述人机交互单元运行于pc端,所述视觉系统利用摄像机和图像处理技术来获取、处理和分析视觉信息,所述视觉系统包括摄像机、图像采集和处理模块、特征提取和分析模块、目标检测和跟踪模块、视觉反馈与控制模块;
9、摄像机,安装于点胶器的一侧,用于捕捉工件图像;
10、图像采集和处理模块,将摄像机捕捉到的工件图像直接通过高速通信接口进行数据传输,并在采集工件图像后,对工件图像进行包括去噪、增强、边缘检测在内的图像处理;
11、特征提取和分析模块,通过特定的图像处理算法提取出目标区域包括边缘、角点、纹理在内的特征,并对目标进行定位和识别,以及分析目标的特性和属性;
12、目标检测和跟踪模块,通过目标检测算法进行目标检测,并通过目标跟踪算法追踪目标在连续图像帧中的位置和运动轨迹;
13、视觉反馈与控制模块,基于从工件图像中获取的视觉信息,向运动控制单元提供实时的反馈信号用于控制点胶器动作。
14、优选地,所述主控制器与辅控制器之间通过通信接口进行通信,所述主控制器与pc、外部存储模块和电源模块相连,所述辅控制器与模数/数模转换电路模块、步进电机模块、流量控制模块和驱动模块相连;
15、外部存储模块,充当发送、接收数据的双向通道;
16、主控制器,接收人机交互单元发送的点胶参数,并发送给辅控制器;
17、模数/数模转换电路模块,对流量控制模块中传感器的检测信号进行模数转换,并发送至辅控制器,同时将数字信号转换为模拟信号;
18、步进电机模块,基于辅控制器的控制信号驱动步进电机按照所需步进角度进行转动,带动点胶器移动至预设点胶位置,并基于辅控制器的控制信号驱动流量控制模块中电磁阀驱动电路带动点胶器进行点胶操作;
19、辅控制器,根据传感器的检测信号得到点胶启动条件检测结果,基于点胶参数结合点胶启动条件检测结果通过步进电机模块带动点胶器移动至预设点胶位置并进行点胶操作。
20、优选地,所述外部存储模块包括存储芯片u4,所述存储芯片u4的串行数据输入/输出引脚与主控制器的pb7引脚相连,以充当发送、接收数据的双向通道;
21、所述存储芯片u4的串行时钟输入引脚与主控制器的pb6引脚相连,主控制器通过控制pb6引脚确定数据传输的速率和时序;
22、所述存储芯片u4的vcc引脚、gnd引脚之间连接电容c19,起到平滑电源波动、滤波干扰和减少信号反射的作用,提高存储芯片u4工作可靠性,确保存储芯片u4正常工作并准确存储数据。
23、优选地,所述电源模块包括电压调节器u3,所述电压调节器u3的gnd引脚、in引脚之间连接电容c9,提供稳定的电源滤波和去除高频噪声,减小电源线上的噪声,提供稳定的电压输出;
24、所述电压调节器u3的out引脚、tab引脚之间连接并联的电容c10和电容c11,起到稳压和滤波的作用;
25、所述电压调节器u3的out引脚通过限流电阻r13连接指示灯d10。
26、优选地,所述模数/数模转换电路模块包括模数转换电路和数模转换电路,所述模数转换电路对流量控制模块中传感器的检测信号进行模数转换,并发送至辅控制器,所述模数转换电路包括与标准接口依次连接的ad芯片、衰减电路和信号输入接口;
27、所述数模转换电路将数字信号转换为模拟信号,所述数模转换电路包括与标准接口依次连接的da芯片、低通滤波器、幅度调节电路和信号输出接口;
28、低通滤波器,滤除da芯片差分输出中的高频噪声,保留模拟信号中的低频成分,提高转换的精度和稳定性;
29、幅度调节电路,调节模拟信号的幅度,避免信号失真或超出器件工作范围,得到可靠、精确的输出结果。
30、优选地,所述步进电机模块包括步进电机和用于驱动步进电机的驱动芯片,所述驱动芯片基于辅控制器的控制信号调节输出电流和电压波形,驱动步进电机按照所需步进角度进行转动,带动点胶器移动至预设点胶位置;
31、所述驱动芯片的输入端接入辅控制器,所述驱动芯片的输出端与步进电机之间连接限流电阻,使得步进电机每个相之间电流平衡,确保步进电机和驱动芯片不超载;
32、所述驱动芯片未使用的输出引脚均接地,以提高电路稳定性、抑制干扰、防止静电放电和保护电路安全;
33、所述步进电机包括x轴步进电机b1、y轴步进电机b2和z轴步进电机b3,所述驱动芯片包括分别驱动x轴步进电机b1、y轴步进电机b2、z轴步进电机b3的驱动芯片u10、u11、u12,所述驱动芯片u10的out5引脚连接流量控制模块中电磁阀驱动电路。
34、优选地,所述流量控制模块包括温度传感器、压力传感器、激光传感器、流量传感器和电磁阀驱动电路,所述温度传感器用于检测点胶针筒中胶体的温度,所述压力传感器用于检测点胶针筒中气体的压力,所述激光传感器用于检测点胶器与预设点胶位置之间的高度距离,所述流量传感器用于检测点胶器的出胶流量;
35、所述电磁阀驱动电路包括依次连接的继电器控制电路、光电耦合器控制电路和驱动电路,所述继电器控制电路包括继电器k2、整流二极管d13和三极管q2,所述三极管q2的基极通过电阻r67接入驱动芯片u10,所述继电器k2的3、4引脚之间反向并联有整流二极管d13,所述三极管q2的集电极接入继电器k2的3引脚,所述继电器k2的输出端连接光电耦合器控制电路;
36、所述光电耦合器控制电路包括光电耦合器u6、限流电阻r61和限流电阻r62,所述光电耦合器u6的输入端接入继电器k2的输出端,所述光电耦合器u6的一个输出端通过限流电阻r62接入电源,所述光电耦合器u6的另一个输出端通过限流电阻r61连接驱动电路;
37、所述驱动电路包括三极管q13、电磁阀接口j4和指示灯led2,所述三极管q13的基极接入限流电阻r61,所述三极管q13的集电极通过电位器r65接入电磁阀接口j4,所述三极管q13的集电极通过指示灯led2接入电磁阀接口j4、电源,所述指示灯led2上并联有整流二极管d11。
38、优选地,所述辅控制器根据温度传感器、压力传感器的检测信号得到点胶启动条件检测结果,当温度传感器、压力传感器的检测数值均在相应的阈值范围内时,所述辅控制器判断满足点胶启动条件,并基于点胶参数通过步进电机模块带动点胶器移动至预设点胶位置;
39、所述辅控制器根据激光传感器的检测数值检测点胶器与预设点胶位置之间的高度距离,当高度距离在相应的阈值范围内时,所述辅控制器控制驱动芯片u10的out5引脚输出高电平,使得三极管q2导通,继电器k2闭合,光电耦合器u6控制三极管q13导通,进而打开电磁阀,将高压气体输送至点胶针筒中,推动活塞使胶体流出;
40、所述辅控制器根据流量传感器的检测数值检测点胶器的出胶流量,并通过控制气体压力大小和电磁阀打开时间长短控制出胶量。
41、优选地,所述驱动模块包括电源电路和保护电路,所述电源电路包括电压调节器u22、u23、u24,所述电压调节器u22、u23、u24的gnd引脚、in引脚之间分别连接电容c43、c34、c31,过滤电源中的高频杂波和电磁干扰,提高输出电压的稳定性,并且对输出电压进行控制和保护,避免因电压异常引起电器损坏或操作不当;
42、所述电压调节器u22的out引脚、tab引脚之间连接并联的电容c44和电容c45,所述电压调节器u23的out引脚、tab引脚之间连接并联的电容c35和电容c36,所述电压调节器u24的out引脚、tab引脚之间连接并联的电容c32和电容c33,起到稳压和滤波的作用;
43、所述电压调节器u22的out引脚通过限流电阻r43连接指示灯d8;
44、所述保护电路中防雷器件选用陶瓷气体放电管,过压器件选用瞬态抑制二极管,过流器件选用自恢复保险丝,静电元件选用esd静电放电二极管。
45、(三)有益效果
46、与现有技术相比,本发明所提供的一种用于自动固晶机的点胶运动控制系统,具有以下有益效果:
47、1)人机交互模块与运动控制单元相结合,实现视觉系统和传感器的有效结合,视觉系统可以实时捕捉工件图像并获取工件位置信息,激光传感器能够检测点胶器与预设点胶位置之间的高度距离,使得点胶运动控制系统能够实现微米级别的精准定位,具有高精度、适应性强、实时反馈控制和自动校正等优势,这些优势使得点胶运动控制系统能够在各种工业应用中实现高质量、高效率的点胶作业;
48、2)使用三个步进电机分别对应x轴、y轴和z轴,意味着每个轴可以单独运动,从而能够实现更灵活、更精准的点胶运动;通过独立控制的三个步进电机,实现多轴同步运动,可以精准控制多轴的运动速度和位置,确保点胶运动的同步性和一致性;通过精确控制x轴、y轴和z轴的运动,可以在微米级别上定位点胶头的位置,从而实现精准的点胶操作,这些优点使得点胶运动控制系统可以实现更灵活、更精准的点胶操作;
49、3)通过运动控制单元在点胶过程中生成的数据报告和视觉系统对点胶过程实时监控的数据结合,回溯点胶过程中出现问题或异常情况的原因,并进行分析,有助于确定在点胶过程中出现的错误、缺陷或故障,并采取相应的纠正措施,从而改进点胶运动控制系统的性能;视觉系统实时监控的数据可以用于评估和优化系统的设计,通过数据分析,可以识别点胶运动控制系统的瓶颈、改进点和优化方向,从而提高点胶运动控制系统的性能、准确性和效率。
- 还没有人留言评论。精彩留言会获得点赞!