一种水泥立磨系统的控制方法、装置、设备及存储介质与流程
本技术涉及工业控制领域,尤其涉及一种水泥立磨系统的控制方法、装置、设备及存储介质。
背景技术:
1、在工业水泥生产里,水泥立磨系统的主要功能是将石灰石、硅、铁、铝等原材料按照既定比例充分混合后研磨成细度合格的粉末状,从而使生料能够在后续水泥窑中充分进行化学反应燃烧,再生成质量合格的熟料,水泥立磨的研磨循环状况对产出生料以及后续水泥生产有至关重要的作用,因此控制水泥立磨中的重要参数确保水泥立磨系统的运行稳定性和出料质量有着直接的影响。
2、目前,在水泥apc(automatic program control system)检测控制系统中,各主要参数变量设置的控制边界是固定的,然而,水泥立磨系统的真实运作处于一个实时动态变化中,对于系统的参数进行控制会经过一段不稳定的运行时期达到新的平衡状态,针对单个预测控制点进行的边界控制可能进一步影响系统其它节点的动态运行,甚至可能反向影响其他节点的运行状态,从而造成运行波动。因此系统给予的固定控制边界难以做到实时有效地参考调整,距离全面实现水泥立磨系统的自动控制还有一定优化空间,控制成效也需要提升。
技术实现思路
1、本技术实施例的主要目的在于提出一种水泥立磨系统的控制方法、装置、设备及存储介质,旨在通过实时界定水泥立磨系统的重要参数的动态稳定范围,相对于固定指标更能适应于系统实际情况、更好服务于节约电耗、维持系统稳定运行等目的,使得水泥立磨系统的自动化统筹控制能够更好地实现。
2、为实现上述目的,本技术实施例的第一方面提出了一种水泥立磨系统的控制方法,所述方法包括:
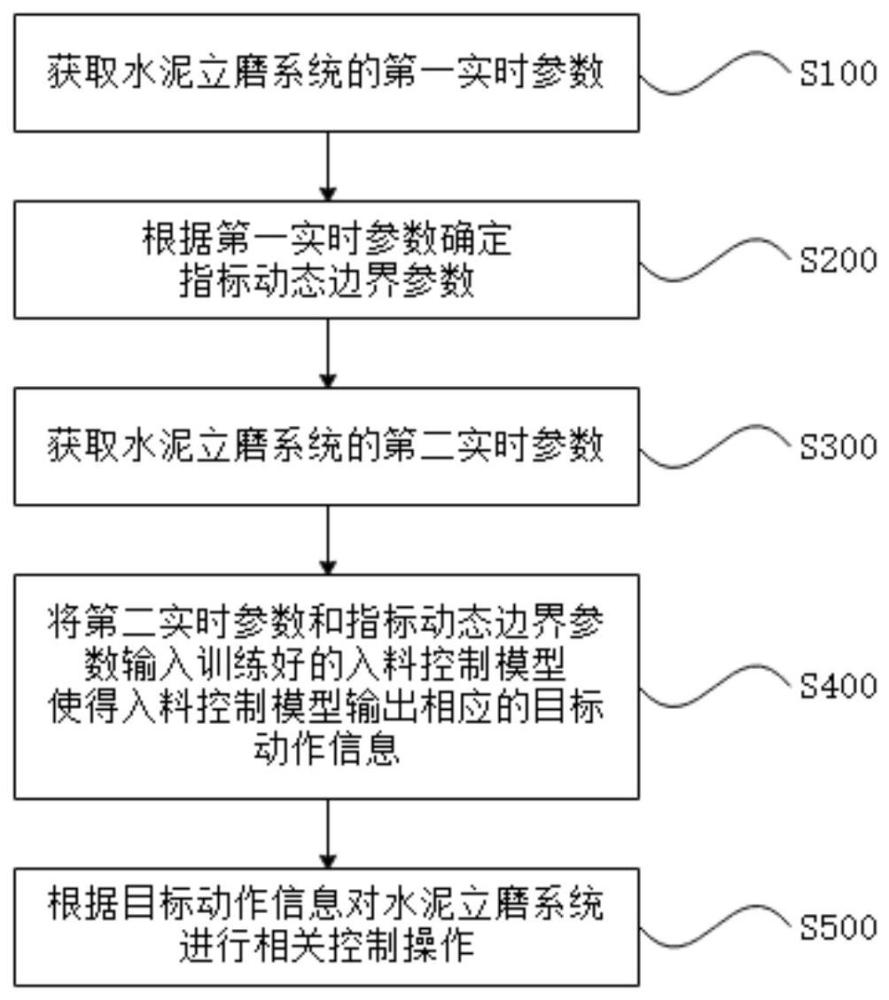
3、获取水泥立磨系统的第一实时参数;
4、根据所述第一实时参数确定指标动态边界参数;
5、获取水泥立磨系统的第二实时参数;
6、将所述第二实时参数和所述指标动态边界参数输入训练好的入料控制模型,使得所述入料控制模型输出相应的目标动作信息;
7、根据所述目标动作信息对所述水泥立磨系统进行相关控制操作。
8、在一些实施例中,入料控制模型通过以下步骤训练得到:
9、按照预设时间间隔,收集所述水泥立磨系统在t个时间点对应的样本状态数据和正确动作信息,其中,所述样本状态数据包括所述水泥立磨系统在时间点t对应的第二实时参数,t为大于1的整数,t={1,2,…,t};
10、将所述t个时间点对应的样本状态数据从先到后依次输入到初始入料控制模型中,使得所述初始入料控制模型输出各个时间点对应的样本动作信息;
11、根据所述各个时间点对应的样本动作信息和正确动作信息,确定各个时间点对应的赏罚反馈值;
12、根据各个时间点对应的样本状态数据、样本动作信息、赏罚反馈值构建交互学习数据组;
13、利用所述交互学习数据组进行强化学习,并更新所述入料控制模型的模型参数,以得到所述训练好的入料控制模型。
14、进一步的,正确动作信息通过以下步骤确定:
15、获取时间点t+n对应的第一实时参数,其中,n为预设的正数;
16、根据所述时间点t+n对应的第一实时参数,确定所述时间点t+n对应的指标动态边界参数;
17、获取所述时间点t+n对应的指标参数;
18、根据所述时间点t+n对应的指标参数和指标动态边界参数,确定预设条件满足情况;
19、根据所述预设条件满足情况确定所述时间点t对应的正确动作信息。
20、进一步的,指标参数包括以下至少之一:提升机电流参数、磨内压差参数、立磨振动参数和料层厚度参数;所述指标动态边界参数包括以下至少之一:提升机电流上边界、提升机电流下边界、磨内压差上边界、磨内压差下边界、立磨振动上边界、料层厚度波动边界。
21、在一些实施例中,根据所述时间点t+n对应的指标参数和指标动态边界参数,确定预设条件满足情况,包括以下至少之一:
22、在所述时间点t+n,所述提升机电流参数小于所述提升机电流下边界,则确定满足加料动作条件;
23、在所述时间点t+n,所述磨内压差参数小于所述磨内压差下边界,则确定满足加料动作条件;
24、在所述时间点t,所述提升机电流参数稳定于所述提升机电流上边界和所述提升机电流下边界之间、所述立磨振动参数大于所述立磨振动上边界且所述磨内压差参数小于所述磨内压差下边界,则确定满足加料动作条件;
25、在所述时间点t+n,所述提升机电流参数大于所述提升机电流上边界,则确定满足减料动作条件;
26、在所述时间点t,所述提升机电流参数稳定于所述提升机电流上边界和所述提升机电流下边界之间、所述立磨振动参数大于所述立磨振动上边界且所述磨内压差参数大于所述磨内压差上边界,则确定满足减料动作条件;
27、在时间点t至时间点t+n的范围内,所述提升机电流参数稳定于所述提升机电流上边界和所述提升机电流下边界之间、所述磨内压差参数稳定于所述磨内压差上边界和所述磨内压差下边界之间、所述立磨振动参数小于所述立磨振动上边界、且所述料层厚度参数的波动值小于所述料层厚度波动边界,则确定满足寻优动作条件。
28、在一些实施例中,根据所述预设条件满足情况确定所述时间点t对应的正确动作信息,包括:
29、在满足加料动作条件的情况下,确定所述时间点t对应的正确动作信息为加料动作指示信息;
30、在满足减料动作条件的情况下,确定所述时间点t对应的正确动作信息为减料动作指示信息;
31、在满足寻优动作条件的情况下,确定所述时间点t对应的正确动作信息为寻优动作指示信息;
32、在所述加料动作条件、所述减料动作条件和所述寻优动作条件均不满足的情况下,确定所述时间点t对应的正确动作信息为无动作指示信息。
33、在一些实施例中,根据所述目标动作信息对所述水泥立磨系统进行相关控制操作,包括:
34、在所述目标动作信息为加料动作指示信息时,按照预设加料量执行加料操作;
35、在所述目标动作信息为减料动作指示信息时,按照预设减料量执行减料操作;
36、在所述目标动作信息为寻优动作指示信息时,按照预设时间间隔和预设加料量执行寻优动作。
37、为实现上述目的,本技术实施例的第二方面提出了一种水泥立磨系统的控制装置,所述装置包括:
38、第一实时参数获取模块,用于获取水泥立磨系统的第一实时参数;
39、指标动态边界参数确定模块,用于根据所述第一实时参数确定指标动态边界参数;
40、第二实时参数获取模块,用于获取水泥立磨系统的第二实时参数;
41、目标动作信息预测模块,用于将所述第二实时参数和所述指标动态边界参数输入训练好的入料控制模型,使得所述入料控制模型输出相应的目标动作信息;
42、立磨系统控制模块,用于根据所述目标动作信息对所述水泥立磨系统进行相关控制操作。
43、为实现上述目的,本技术实施例的第三方面提出了一种电子设备,所述电子设备包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述第一方面所述的方法。
44、为实现上述目的,本技术实施例的第四方面提出了一种计算机存储介质,所述计算机存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述第一方面所述的方法。
45、本技术提出的一种水泥立磨系统的控制方法、装置、设备及存储介质,引入动态边界参数,通过实时计算动态边界参数从而实现对水泥立磨系统的预见性控制,提高智能化程度,相对于对系统设置固定指标更能够适应系统实际情况,帮助节约系统电耗、维持系统稳定运行等,通过训练好的入料控制模型判断水泥立磨系统的实时参数和的动态边界的情况,输出目标动作信息,能够使得模型学习到更加复杂的决策方式,实现水泥立磨系统的高自动化控制。
- 还没有人留言评论。精彩留言会获得点赞!