一种异形盖注胶机的制作方法
本发明涉及一种异形盖注胶机,属于金属包装领域。
背景技术:
1、在包装行业,包装除了包装物品的包装瓶、包装箱外,还有用于封装包装瓶、包装箱等用的包装盖,不同于传统的圆形盖子,现在还有生产方型盖,椭圆盖等异型盖,因为市场需求大,生产异型盖的生产速度也在不断地提升。
2、异型盖生产过程中,需要对异形盖上的沟槽进行注胶处理,异形盖上的沟槽存在多条长短不同的边,现有技术在各边内滑动时的线速度具有差异。
3、因此,异型盖生产速度的提升也意味着在后端导致后端的注胶工序需要搭配多台注胶机来匹配前端的打盖速度,这不仅仅加大了设备的占地成本在需要加快生产速度时就必需加派人手参与,增加了人工成本。
4、如现有技术1:申请号为202323348603.4,专利申请名称为一种异形盖注胶装置,揭示了通过在轨迹板上开设轨迹槽,喷枪在导向组件的带动下沿轨迹槽以近似匀线速度运动,使得喷枪在注胶的过程中在相同时间内经过的路程近似相同,在喷枪的出胶流速不变的情况下,在异形盖上的沟槽内注胶均匀,提高产品质量。
5、如现有技术2:申请号为200820103187.8,专利申请名称为一种异形盖注胶机,揭示了采用机械臂手臂式注胶方式,该机械臂主要通过y向工作臂、x向工作臂构成,并采用plc可编程控制器来完成整个工作流程的控制,通过伺服电机对plc可编程控制器输出控制信号的响应并经滚珠丝杆的配合,让注胶阀随着y向工作臂、x向工作臂按一定方式动作而工作,使得异形盖的注胶过程不因罐盖运动或注胶嘴运动而受影响。
6、也就是说,上述现有技术1是通过机械的强制限位来走出异型的注胶机,不仅速度慢,且在运行过程中无法使注胶轨迹匀速进行,在转角处易注胶不均影响产品治疗,由于是限位注胶,不同的盖型又需要不同的限位模具;
7、现有技术1采用y向工作臂、x向工作臂的方式,结构冗余,占用空间大,需要不停地位移调整,生产速度慢。
8、因此,本发明提供一种注胶速度快,注胶轨迹运行速稳定且注胶均匀的异形盖注胶机。
技术实现思路
1、本发明提供了一种异形盖注胶机,可以有效解决上述问题。
2、本发明是这样实现的:
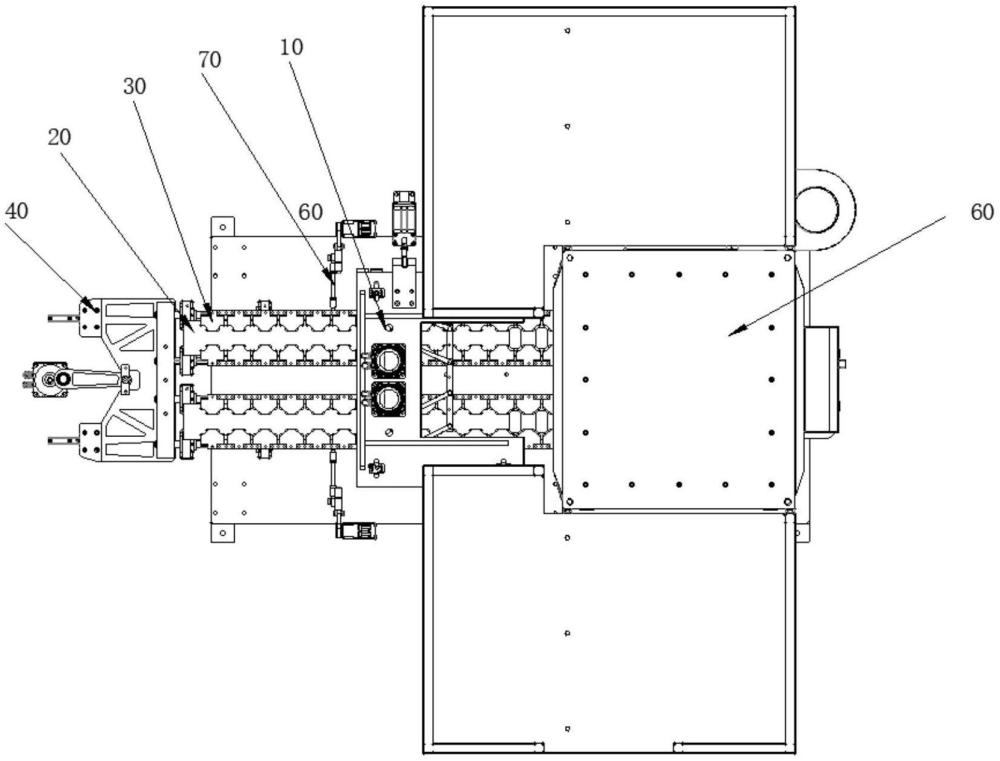
3、一种异形盖注胶机,包括注胶机械臂和位于下方用于放置物料的送盖平台,所述送盖平台数量两块,互相平行;
4、其中,所述注胶机械臂包含横跨两块送盖平台的横梁,
5、伺服电机,数量2个,平行设置,安装在横梁顶部正中间;
6、双连杆结构和注胶枪,所述注胶枪数量若干,并列装配在所述双连杆结构上,所述双连杆结构和所述伺服电机机械连接,伺服电机带动注胶枪周循环实现均匀注胶。
7、作为进一步改进,所述双连杆结构包含第一支杆、第二支杆、第三支杆;所述第一支杆平行于所述横梁,所述第三支杆数量根,并且所述第三支杆装配在所述横梁上,所述第二支杆数量若干,分为组,每组两根,两根所述第二支杆首尾转动连接在一起后分别转动连接于所述第一支杆和第三支杆上;
8、传动带,所述第三支杆端部通过传动带分别和伺服电机、皮带轮传动连接;所述第一支杆上开有若干用于安装胶枪的安装孔。
9、作为进一步改进,所述横梁包含若干支撑柱、安装板,所述支撑柱数量若干,分成2组,分列在两块送盖平台两侧,每组支撑柱顶端都安装有安装板,实现两块安装板互相平行;
10、摆臂和气缸,所述摆臂横跨在两块安装板之间,并且所述摆臂首端转动连接于其中一块安装板上,并且在摆臂首端固定连接在气缸输出端,气缸倾斜安装在安装板上,所述摆臂尾端搭接在另一块安装板上。
11、作为进一步改进,还包括若干用于夹取送料的夹爪和循环送盖单元,其中,所述夹爪包含夹爪支架和若干爪板,每根夹爪支架顶端等距离装配有若干爪板,并且所述夹爪支架数量个,分列在送盖平台两侧,呈对称设置,使得爪板裸露在送盖平台上方,夹取物料。
12、作为进一步改进,所述循环送盖单元包含花键轴、轴承、联动支架、曲柄、伺服电机;
13、每根夹爪支架底端采用花键轴贯穿连接,并且每根花键轴上都设置有若干轴承,在若干花键轴的首端采用联动支架串联在一起,在所述联动支架另一侧安装有伺服电机,所述伺服电机输出端通过曲柄连接至联动支架,以带动花键轴做直线运动;
14、还包含花键副,所述花键副数量若干,分布在花键轴上,随着花键轴做直线运动而传递扭矩。
15、作为进一步改进,还包含控制夹爪开合的动力单元,对称设置在夹爪两侧,以控制夹爪的开合,所述动力单元包含第三伺服电机、偏心凸轮、支架、第一支杆、第二支杆、曲柄;
16、所述第三伺服电机安装在送盖平台侧面,并且在所述第三伺服电机输出端安装有偏心凸轮;
17、平行固定在支架上的第一支杆、第二支杆,所述第一支杆、第二支杆末端通过连接花间副与花键轴上的花键副配合;
18、所述偏心凸轮通过曲柄和支架连接,以实现第三伺服电机带动支架发生角度偏转。
19、作为进一步改进,所述循环送盖单元还包含若干直线导轨,分别设置在联动支架底端两侧。
20、作为进一步改进,还包括出料单元和立式烘炉,所述出料单元设置在送盖平台尾端,物料通过所述出料单元传送至位于送盖平台尾端的立式烘炉中。
21、作为进一步改进,所述出料单元包含设置在送盖平台下方的固定板;
22、轴承座、送料链轮,所述轴承座数量座,对称设置在固定板上,两座轴承座之间采用轴杆串联若干送料链轮,并且所述轴杆与第二伺服电机输出端机械连接;
23、送料链、夹片、第二夹爪,送料链数量若干,所述送料链缠绕在所述送料链轮上,并且每条送料链都设置有若干组夹片,每组有个夹片,与位于送盖平台上的第二夹爪配合,以实现夹片带动第二夹爪循环往复运动夹取已经注胶完毕的物料。
24、作为进一步改进,所述爪板为方形板的自由端两侧切有夹口。
25、本发明的有益效果是:
26、①本发明伺服电机接收注胶信号,精准控制转速,进而控制双连杆结构根据不同的注胶轨迹完成循环往复运动,从而实现注胶枪完成不同注胶轨迹且保持稳定的线速度,相对于传统机械臂需要花费时间位移后或者机械的强行限制才能完成不同注胶轨迹,本发明直接利用双连杆结构控制轨迹,兼顾灵活性和减少位移移动时间,注胶速度快,且不浪费时间。
27、②本发明需要检修注胶枪时,采用气缸工作,抬升摆臂,注胶枪也随之抬高,注胶枪远离送盖平台后注胶头裸露出来,方便清理注胶枪,不用拆卸再安装,检修效率高,检修完毕后,反向操作,摆臂尾端搭接在另一块安装板,恢复初始位置。
28、③本发明的夹爪、循环送盖单元、动力单元、扎头升降单元和注胶机械臂,都依靠伺服电机进行连锁反应,夹爪抓取物料,循环送盖单元紧接着将物料移动下一位置,到位后,同时夹爪松开退回初始位置,同时扎头升降单元上,注胶机械臂下降,进行注胶工作,达到送料、注胶反应迅速,动作整齐划一,生产效率提高。
- 还没有人留言评论。精彩留言会获得点赞!