一种板材检测装置的制作方法
:
1.本实用新型涉及板材检测技术领域,尤其涉及一种板材检测装置。
背景技术:
2.在板材生产过程中,为了保证板材质量通常需要对板材进行视觉测量,以检验板材尺寸以及孔、槽的规格、位置等是否合格等。目前现有的测量方法一般为利用多条线结构光照射产品区域、采用面阵摄像机成像,对线结构光投影的产品表面图像进行处理,以判断产品是否存在缺陷等。
3.该方法相比二维图像方法,可测出产品的高度,显著提升准确性。但是,这类方法一方面难以检测出光线未照射区域的形状变化,另一方面也不能得出产品表面的灰度值,精度较低,应用受限。此外,现有的测量装置不能一次性对板材进行六个面的测量,需要使用多个测量装置,测量效率低,成本高。
技术实现要素:
4.为解决上述问题,本实用新型提供了一种板材检测装置。
5.为实现上述技术效果,本实用新型的技术方案为:
6.一种板材检测装置,包括输送机构、检测机构和控制机构,所述检测机构的输入端设有扫码机构。
7.所述输送机构用于输送板材,其包括输送支架及依次设在输送支架上的上料区、检测区和剔除区,所述上料区设有上料输送线,所述检测区设有检测输送线和板材返回线,所述剔除区设有剔除输送线,所述检测输送线的输入端和上料输送线的输出端连接,所述板材返回线的对应设在所述检测输送线的一侧,且其输入端与所述检测输送线的输出端连接,所述剔除输送线的输入端与所述板材返回线的输出端连接。
8.所述检测机构对应设在所述输送机构的检测区的上方,其用于对输送机构上的板材进行检测,所述检测机构包括ccd相机和带结构光光学系统,待检测的板材在输送机构上输送时,所述ccd相机用于拍摄待测板材的表面图像,所述带结构光光学系统用于产生若干沿板材的运动方向在ccd相机两侧以不同的角度姿态对称布局的带结构光;
9.所述控制机构与所述输送机构、检测机构连接,并控制各机构的运行。
10.优选的,所述板材返回线输出端与所述检测输送线的输入端连接,且所述板材返回线输出端与所述检测输送线之间设有翻板机构。
11.优选的,所述板材返回线的输入端与所述检测输送线的输出端通过同步带连接。
12.优选的,所述板材返回线的输出端与所述检测输送线的输入端通过同步带连接。
13.优选的,若干所述带结构光在ccd相机两侧均匀布局,且布局的角度范围为0
‑
180
°
。
14.优选的,所述带结构光光学系统包括若干沿板材的运动方向在ccd相机两侧对称布置的带结构光光源,所述带结构光光源包括激光器、鲍威尔棱镜和掩膜,所述掩膜加装在
所述鲍威尔棱镜下方。
15.优选的,所述所述掩膜为矩形掩膜或带特征掩膜。
16.优选的,所述带结构光为宽度5
‑
20mm的平行带状激光线,其上下边缘的轮廓清晰且直线度小于0.1mm。
17.本实用新型的有益效果是:
18.(1)本实用新型提供了一种板材检测装置,包括输送机构、检测机构和控制机构,各机构相互配合实现了板材自动检测,通过在ccd相机两侧以多角度姿态对称布置的若干带结构光,可以同步以不同角度的光源照射可以消除拍照时的光源盲区,得到边缘清晰的产品表面图像,达到对产品的精确测量。
19.(2)本实用新型检测机构基于多条带结构光的清晰的边缘轮廓及亮度,可计算获得板材表面任一点四维坐标。测量精度高,较现有的线结构光测量方法,效率提升2
‑
5倍,精度可以做到像素级精度。
附图说明:
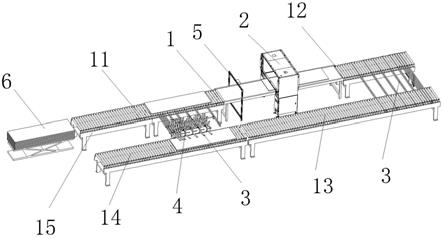
20.图1是本实用新型板材检测装置的结构示意图;
21.图2是本实用新型检测机构的原理示意图;
22.图3是本实用新型带结构光的布局图,其中图3
‑
a为带结构光分布示意图,图3
‑
b为带结构光投射到输送平台表面形成光带示意图;
23.图4是本实用新型带结构光消除视觉盲区的原理图;
24.图5是本实用新型带结构光产生的原理示意图;
25.图6是本实用新型矩形掩膜的原理示意图;
26.图7是本实用新型带特征掩膜的原理示意图;
27.图8是本实用新型一条带结构光入射到输送平台表面时,带结构光上下边缘在ccd相机中获取坐标的示意图;
28.图9是本实用新型两条带结构光入射到输送平台表面时,带结构光上下边缘在ccd相机中分别获取坐标的示意图;
29.图10为当待测板材经过带结构光时,带结构光前后边缘的x坐标示意图;
30.图11为多条带结构光通过ccd相机连续扫描可得到的三维轮廓曲线;
31.图12为带结构光边缘内部图像的投影原理示意图。
32.图中:1输送机构,11上料输送线,12检测输送线,13板材返回线,14板材剔除线,15输送支架,2检测机构,21 ccd相机,22带结构光光学系统,221激光器,222鲍威尔棱镜,223掩膜,2231矩形掩膜,2232矩形通光区域,2233带特征掩膜,2234带特征通光区域,2235特征图形,224带状光线,225带结构光,23输送平台,4翻板机构,5扫码机构,6板材。
具体实施方式:
33.下面结合附图对本实用新型的较佳实施例进行详细阐述,以使本实用新型的优点和特征能更易被本领域人员理解,从而对本实用新型的保护范围做出更为清楚明确的界定。
34.见图1,一种板材检测装置,包括输送机构1、检测机构2和控制机构(图中未给出),
所述检测机构2的输入端设有扫码机构5。
35.所述输送机构1用于输送板材6,其包括输送支架15及依次设在输送支架15上的上料区、检测区和剔除区;所述上料区设有上料输送线11,所述检测区设有检测输送线12和板材返回线13,所述剔除区设有剔除输送线14,所述检测输送线12的输入端和上料输送线11的输出端连接,所述板材返回线13的对应设在所述检测输送线12的一侧,且其输入端与所述检测输送线12的输出端连接,所述剔除输送线14的输入端与所述板材返回线13的输出端连接。
36.所述检测机构2对应设在所述输送机构1的检测区的上方,用于对输送机构1上的板材6进行检测。
37.所述检测机构2可检测板材6的五个面(正面、左右面和前后面同步扫描式测量),一次性完成板材6五面的尺寸、孔位和槽等的测量。此外,少数板材6需要六面检测(比如反面有孔等),对于这些板材6的检测,可将板材返回线13输出端与所述检测输送线12的输入端连接,且所述板材返回线13输出端与所述检测输送线12之间设有翻板机构4。板材6经检测机构2一次检测后,由检测输送线12进入板材返回线13,再由翻板机构4将板材6翻转后二次进入检测机构2,来检测反面,可用于对板材6的六面检测。
38.所述板材返回线13与所述检测输送线12可通过多种方式连接,实现板材6的连续输送。比如,所述板材返回线13的输入端与所述检测输送线12的输出端通过同步带3连接。同样,所述板材返回线13的输出端与所述检测输送线12的输入端也可通过同步带3连接。
39.所述控制机构与所述输送机构1、检测机构2连接,并控制各机构的运行。
40.见图2,所述检测机构2包括ccd相机21和带结构光光学系统22,待检测的板材6在输送机构1上输送时,所述ccd相机21用于拍摄待测板材6的表面图像,所述带结构光光学系统22用于产生若干沿板材6的运动方向在ccd相机21两侧以不同的角度姿态对称布局的带结构光225;ccd相机21拍摄的图像传输至控制机构进行信息处理,其中,图中箭头方向为板材6的运动方向。
41.若干所述带结构光225在ccd相机21两侧均匀布局,且布局的角度范围为0
‑
180
°
。本技术的带结构光25为轮廓清晰的带状光线,其互不干扰,且覆盖输送平台23的全宽(若输送平台23宽度超过所述带结构光225宽度,可采用多光源并列覆盖的方式)。
42.如图3至图7所示,若干条带结构光225采用图3
‑
a所示的方式对称布局以及多角度布局,若干所述带结构光在ccd相机两侧均匀布局,且布局的角度范围为0
‑
180
°
,投射到输送平台23表面形成图3
‑
b所示的图形。这种光源布局方式可以解决光源盲区的问题,比如,设板材6与输送平台23的夹角为α,带结构光225与输送平台23的夹角为β,当板材6与输送平台23的夹角α大于带结构光225与输送平台23的夹角β时,板材6表面的c区域永远无法被光源照射,从而形成视觉盲区,本技术采用多角度和对称布局的光源后,可以同步以不同角度的、对称分布的带结构光光源照射,可以消除拍照时的光源盲区。
43.所述带结构光光学系统22包括若干沿板材6的运动方向在ccd相机21两侧对称布置的带结构光光源,所述带结构光光源包括激光器221、鲍威尔棱镜222和掩膜223,所述掩膜223加装在所述鲍威尔棱镜222下方。所述掩膜223为矩形掩膜2231或带特征掩膜2233,其中,矩形掩膜2231上的设有矩形通光区域2232,所述带特征掩膜2233上的设有带特征通光区域2234,其上下边缘具有特征方格等特征图形2235,可以提高带结构光225照射区域边缘
的识别精度。
44.此外,本实用新型在工作时,包括以下过程:
45.s1、上料:将贴有型号、尺寸、订单号信息的各板材6依次放置到上料机构1的输送区,扫码机构5扫描板材信息,并传输至控制机构;
46.s2、检测:输送机构1将板材6输送至检测区,检测机构2来测量板材6的尺寸以及板材6上孔、槽的位置和大小是否符合要求,并将符合要求的板材6由检测输送线12的输出端输送至下一加工生产线即存储分拣线(图中未示出)进行存储分拣,将不符合要求的板材由检测输送线12的输出端输送至板材返回线13、再输送至板材剔除线14来剔除。检测输送线12的输出端与下一加工生产线(存储分拣线)及板材返回线13均连接。
47.此外,所述步骤s2中,对于两面均有孔、槽的板材,在经过一次测量后,通过板材返回线13返回,经翻板机构4翻转后二次进入检测机构2进行测量;对于符合要求的板材6,由检测输送线12的输出端输送至下一加工生产线;对于不符合要求的板材6,经板材返回线13后不进入翻板机构4,直接输送至板材剔除线14来剔除。
48.所述步骤s2中,具体的检测过程包括以下步骤:
49.s21、安装ccd相机21和带结构光光学系统22,所述带结构光光学系统22对称分布在ccd相机21两侧;
50.s22、制作带结构光,其过程为:开启带结构光光学系统22中的激光器221,将激光器221产生的激光束依次通过鲍威尔棱镜222和掩膜223,生成特定尺寸范围且边缘清晰的带结构光225;
51.s23、开启ccd相机21,获取板材6表面任意点的四维坐标,其过程为:使板材6在输送平台23上按照一定速度向前运动,ccd相机21连续扫描拍照来获取板材6的表面的二维图像,并传输至控制机构,控制机构接收图像后进行信息处理,获得板材6表面任意点的三维坐标,并通过叠加图像中各点的灰度值,获得板材6表面任意点的四维坐标。
52.优选的,所述步骤s22中,生成的带结构光225为宽度5
‑
20mm的平行带状激光线,其上下边缘的轮廓清晰且直线度小于0.1mm,具体根据测量精度要求选择。
53.本技术在制作带结构光225时,在鲍威尔棱镜222下方加装掩膜223,通过改变掩膜223上通光区域的长度和宽度的尺寸,确定带结构光225照射到板材6表面的尺寸范围,同时获取清晰且准确的带结构光225上下边缘轮廓。
54.如图8至图12所示,所述步骤s23中,获得板材6表面任意点的三维坐标的过程为:通过带结构光225的宽度、入射角度以及理论上在输送平台3表面上投影的坐标与该带结构光225在二维图像中的投影宽度和投影坐标结合,基于ccd相机21的标定数据计算出该投影边缘轮廓的三维坐标;通过在ccd相机21两侧以不同的角度姿态对称布置的若干带结构光225,可获得板材6表面若干条线的三维坐标,并通过数学拟合获得板材6表面任意点的三维坐标(x,y,z),所述四维坐标为(x,y,z,p),其中,p为灰度值,所述灰度值由二维图像中带结构光的亮度来获得。
55.其推导过程具体为:以一条带结构光225为例,当该带结构光225直接照射到输送平台23的表面时,在图8所示xoz坐标系中带结构光225与输送平台23的夹角为θ1,带结构光225上下边缘在ccd相机21中获取的x轴坐标为x
a
和x
b
,z坐标为0。
56.当待测板材6经过带结构光225时,带结构光225前后边缘的x坐标为x
a1
和x
b1
,对应
的z坐标分别为:
57.za1=(x
a
‑
x
a1
)*tan(θ1)
58.zb1=(x
b
‑
x
b1
)*tan(θ1)
59.对于多条带结构光225,其x轴坐标有固定距离关系,两条带结构光225的夹角分别为θ1和θ2,基础坐标分别为x
a
、x
b
和x
c
、x
d
,则两条带结构光225扫描所得的图像的坐标系可以统一到一个坐标系下。
60.基于多条带结构光225通过ccd相机21连续扫描可得到如图11所示的三维轮廓曲线。通过增加带结构光225的数量和降低扫描速度可以增加轮廓线的密度,提高测量精度。
61.其中,相机拍摄的二维图像信息包括(u,v,p)三个参数,其中u和v是像素坐标,p为该像素点的灰度值。通过标定获得像素到世界坐标系的转换矩阵r,可得(x,y,z)=(u,v,θ1)r。进一步引入该点的灰度值p,得到带结构光225边缘曲线上各点的四维数据(x,y,z,p)=(u,v,θ1,p)r。
62.对于带结构光225上下边缘内部图像的物理坐标采用空间样条曲线拟合方式计算,c为边缘轮廓线内任意点,截图y值相同面与各边缘轮廓线的交点n1(x1,y,z1)、n2(x2,y,z2)、n3(x3,y,z3)、n4(x4,y,z4),分别通过3次样条曲线拟合获取。
63.灰度值计算过程如图12,已知a和b点为相邻像素点,其像素坐标为(u
a
,v
a
,p
a
)和(u
b
,v
b
,p
b
),对应物理点a坐标(x
a
,y
a
,z
a
,p
a
)和b坐标(x
b
,y
b
,z
b
,p
b
),对于c的世界坐标为(x
c
,y
c
,z
c
),其投影点c的灰度计算方式如下:p=(z
c
‑
z
a
)/(z
b
‑
z
a
)*(p
b
‑
p
a
)。
64.在本公开中,术语如“上”、“下”、“左”、“右”等指示的方位或位置关系为基于附图所示的方位或位置关系,只是为了便于叙述本公开各部分的结构关系而确定的关系词,不能理解为对本公开的限制。
65.以上所述实施例仅表达了本实用新型的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1