一种超重力离心模型液体排放控制装置和方法
1.本发明属于超重力离心机模型试验领域的一种超重力下的控制装置和方法,具体涉及一种超重力离心模型试验的液体排放控制装置和方法。
背景技术:
2.超重力离心机实验是新世纪岩土工程领域新发展的科学研究手段,以其还原工程现场应力条件,缩小构筑物比尺、加速时间进程,包括土体内部渗流过程等重要特征而成为一个极有效的研究工具,已经在国家重大发展规划项目上发挥独特作用。然而,因为离心机运作环境的特殊性
‑
封闭性,常常导致无法精准有效的对舱内物理模型工况进行干预和控制变量,因此,一个亟待解决的重要难题就是如何通过科学的系统设计以达到脱离离心机而在外部开放环境对超重力下的物理模型实现精确控制的目的。
3.岩土工程超重力离心试验的一个典型的重要科学问题就是箱内模型液体的排放控制问题,如果把排放控制系统连同模型一起封装在超重力环境试验舱内,将会面临几个问题,一个是如何保证控制系统在超重力环境下的平稳运行,二是如何通过控制系统精确干预和改变渗流条件以满足实验需求,三是保证附属的控制设备运作时不会对模型造成不可逆的扰动甚至破坏,要解决这些问题有赖于在常重力环境下运作的控制器同时能够在超重力舱内平稳运行,此外外部控制人员还要能实时改变模型内液体的渗流工况以满足试验需求并能及时的给予反馈等。显然,这种需求将会加大对模型箱和控制器的性能要求,不可避免地更加复杂化试验,除了加大实验难度外也会增加失败率,引入的不可控变量也会影响实验精度。
4.所以,通过科学的系统设计,由超重力试验设计或功能提出需求,直接在常重力环境下对模型内部液体的排放进行智能的反馈调节,形成双环境的协同工作平台,这对于促进高效率、高精度的超重力实验发展具有显著的实际意义。
5.《水利水运科学研究》期刊2000年04期中“离心模型试验模拟基坑开挖的一种新方法”一文中介绍了在超重力环境下,通过在模型箱内部分隔出一处空间,设置排放装置,通过分级开关电磁阀以达到排土模型内液体的目的。
6.《地下空间与工程学报》期刊2010年06卷06期中“具有多道支撑的深基坑开挖离心模拟试验方法”一文中介绍了在离心机试验时设置的依附于模型的放液系统,根据实验需求分时控制调速阀改变模型液体容量的目的。
7.现有相关技术或方法的主要缺点如下:
8.(1)现有的超重力环境下的液体排放问题,基本通过模型箱内部独立设置的装置来达到排水,储水的目的,这必然要求附属的装置在超重力环境下平稳运行,尤其调速阀和电机的运行,由于工作环境的大变迁,导致试验的成功与否充满变数。
9.(2)现有的控制装置和模型箱整体一起封装与超重力舱内,基本均是通过预先设定的阈值等条件自发式或触发式的被动进行液体的排放工作,由于液体排放工作过程依赖控制系统的自主运转,试验人员主观能动性无法有效指导试验发生全过程,更不能及时给
予反馈无法根据要求实时的干预和调整控制变量,整个过程机械性强,精度低,效率低,失败率高。
10.(3)现有的液体排放系统是通过改装模型箱得到的,这将加大模型制作的难度,同时这类高度个性化的液体控制系统阻碍其功能移植到另一个不同的试验上,通用性低。
11.超重力离心液体排放试验的高精度、高灵活性要求现有技术中缺少了一个能够精准、智能控制的排放系统,并且这种控制方法能够简便易行的适用于其他批次的岩土工程试验。
技术实现要素:
12.本发明的目的在于解决上述背景技术中的技术问题而提出的一种超重力离心试验液体排放控制方法与应用,基于超重力环境下实时液体排放需求和常重力的反馈控制系统共同形成双环境协作平台以达到高效率、高精度的实验目的。
13.本发明通过形成超重力
‑
常重力的双环境协作平台,来实时干预超重力模型液体排放控制试验,实现对模型内部液体排放进行高精度、高效率控制的结果。
14.本发明所采用的技术方案是:
15.一、一种超重力离心模型液体排放控制装置:
16.超重力离心机包括超重力离心机主体和试验端吊篮,试验端吊篮内放置离心模型;包括待排液体区域、压力表、密闭储液罐、精密电子秤、液环装置、比例调节阀和真空调节系统;离心模型内放置待排液体区域,试验端吊篮内放置精密电子秤和密闭储液罐,密闭储液罐置于精密电子秤上,超重力离心机主体的底部安装液环装置;待排液体区域经试验端吊篮内部的液管管道和密闭储液罐连通,密闭储液罐经气管管道连接液环装置,经液环装置连接到比例调节阀的一端,比例调节阀另一端连接真空调节系统,真空调节系统中安装压力表。
17.所述的气管管道从试验端吊篮伸出经超重力离心机的转臂、转轴后连接到液环装置。
18.所述的待排液体区域采用容器放置在离心模型内,且容器内盛放液体。
19.所述的待排液体区域上端开设端口作为出液口,端口经液管管道和密闭储液罐连通。
20.所述的比例调节阀和真空调节系统置于常重力环境下。
21.所述的密闭储液罐的通气口通过气管管道连接到液环装置的一个端口,再借由液环装置的另一个端口通过另一段管路连接到常重力环境下的真空调节系统。
22.二、一种超重力离心模型液体排放控制方法:
23.s1、建立设置密闭储液罐的液体质量控制参数z1和真空度需求控制参数z2;
24.s2、在超重力离心机工作前,通过实时调节常重力环境的真空调节系统使得满足s1的密闭储液罐的液体质量控制参数z1和真空度需求控制参数z2;
25.s3、在超重力离心机工作情况下,根据真空调节系统实时监测超重力环境下离心模型的状态变化,根据s1的密闭储液罐的液体质量控制参数z1和真空度需求控制参数z2判别并校核试验,直到满足。
26.所述s1中,密闭储液罐的液体质量控制参数z1和真空度控制参数z2,具体为:
27.液体质量控制参数z1表达为如下的关系式:
28.z1=δm/δt
29.其中,z1表示密闭储液罐的液体质量控制参数,δm为预定时间间隔δt内的密闭储液罐内液体质量的变化量;
30.真空度控制参数z2表达为如下的关系式:
31.z2=δp
32.其中,z2表示密闭储液罐的真空度控制参数,δp为常重力环境下真空调节系统的真空压差。
33.所述的s2,具体为:
34.s2.1、根据预先设置的液体质量控制参数z1和液体质量上下限误差δz1,建立液体质量控制范围z1‑
δz1~z1+δz1;
35.s2.2、由真空调节系统按照预先设定的抽气流量进行抽真空工作,同时控制比例调节阀的开度,预先调节密闭储液罐内的真空差;
36.就是利用手动调节预先调节到一个经验值,然后进入系统自动调节环节,因为我们最终是需要实现实时闭环反馈自动调节的,所以事先手动调节达到一个比较接近的经验值,这样自动调节环节便可以在较短时间内达到动态平衡。
37.s2.3、通过密闭储液罐底部精密电子秤实时检测密闭储液罐内的液体质量变化量δm*,根据液体质量实时变化量δm*计算密闭储液罐内液体的排液速率δm*/δt;
38.s2.4、根据实时获得的排液速率δm*/δt与设定的液体质量控制参数z1的对比反馈,实时调节真空调节系统的抽气流量和比例调节阀的开度,使得排液速率δm*/δt在液体质量控制范围z1‑
δz1~z1+δz1内。
39.所述的s3,具体为:
40.s3.1、根据预先设置的真空度控制参数z2和真空度控制上下限误差δz2,建立真空度控制范围z2‑
δz2~z2+δz2;
41.s3.2、由真空调节系统按照预先设定的抽气流量进行抽真空工作,同时控制比例调节阀的开度,预先调节密闭储液罐内的真空差;
42.s3.3、通过密闭储液罐顶部的压力表实时反馈真空调节系统的真空压力,获得单位时间的真空压力波动变化值δp*/δt,;
43.s3.4、根据实时获得的真空压力波动变化值δp*/δt与设定的真空度控制参数z2对比反馈,实时调节真空调节系统的抽气流量和比例调节阀的开度,使得真空压力波动变化值δp*/δt在真空度控制范围z2‑
δz2~z2+δz2内。
44.本发明方法是借由超重力舱的离心模型、密闭储液罐、离心机液环装置和常重力真空调节系统组成的离心液体排放控制系统,依据试验要求提出模型液体排放控制参数来得到储液罐的质量或真空度控制参数,进而由真空调节系统实时调节真空压力来满足密闭储液罐的需求,从而实现高精度满足不同模型试验需求的排放控制标准的目的。
45.如图2所示,本发明包括了置于超重力下的结构部分,也包括了置于常重力下的结构部分。
46.在本发明装置和方法下,所有的控制器件和控制源均在常重力环境中进行工作,能够通过在常重力环境下的控制器件进行干预超重力环境中的模型,进而实现了在超重力
环境外对超重力环境进行了准确有效的控制。解决了现有技术中针对超重力环境下的液体排放控制均在超重力环境内部进行设置带来的问题,解决了液体排放控制在超重力环境内部施加设备和动作进行带来干扰的问题,也解决了利用在超重力环境内部施加设备和动作会给实验模型带来较多干扰的问题。
47.本发明的有益效果为:
48.本发明通过常重力环境的真空调节系统,借由离心机的液环装置进一步改变超重力舱密闭储液罐的真空度,达到对模型内部液体排放试验进行高精度控制的目的。
49.首先,本发明方法极大地降低了模型试验对附属设备的强依赖性,从根本上简化了试验的复杂性,对于模型的干扰性降低,也减轻了对设备的高性能要求,因此通过本方法进行的试验相比已有的相关技术来说更安全;
50.然后,通过常重力控制系统来实现对超重力环境内模型物理力学状态的精确干预,双环境的相依协同工作,提高了试验的效率,可以实时的根据模型试验需要提出新要求和新参数,及时反馈和更改,科学性更强;
51.接着,本发明将模型与液体排放控制系统隔开,使得本发明系统可方便的适用于其他类型的超重力试验,不管静力抽水还是动力排水试验,均可以方便迁移,更广泛的普适性是已有的技术所未能解决的;
52.最后,精度更高,包括高精度质量控制和高精度的真空度调节设备,操作简便,科学的系统设计在保证超重力离心试验平稳运行的同时,节约分析成本,易于推广使用。
53.本发明方法能够满足超重力离心液体排放试验的高精度、高灵活性要求,并且控制方法能够简便易行的适用于其他批次的试验,科学性强,易于推广。
附图说明
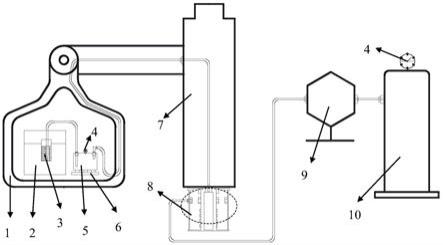
54.图1为超重力离心液体排放控制试验系统组成示意图;
55.图2为液体排放控制系统技术方案要素组成图;
56.图3为本发明实施例的超重力基坑离心模型的示意图;
57.图4为超重力离心液体排放控制方法的试验流程图;
58.图5为某一基坑离心模型液体排放控制试验情况示意图。
59.图中:试验端吊篮1,离心模型2,待排液体区域3,压力表4,密闭储液罐5,精密电子秤6,超重力离心机主体7,液环装置8,比例调节阀9,真空调节系统10。
具体实施方式
60.下面结合附图和具体实施例对本发明做进一步的说明。
61.如图1所示,超重力离心机包括超重力离心机主体7和试验端吊篮1,试验端吊篮1内放置离心模型2,离心模型2底部固定于试验端吊篮1内底面;还包括待排液体区域3、压力表4、密闭储液罐5、精密电子秤6、液环装置8、比例调节阀9和真空调节系统10;比例调节阀9和真空调节系统10置于常重力环境下,其余器件置于超重力环境下。
62.离心模型2内放置待排液体区域3,试验端吊篮1内放置精密电子秤6和密闭储液罐5,离心模型2旁放置密闭储液罐5,密闭储液罐5置于精密电子秤6上,超重力离心机主体7的底部安装液环装置8;待排液体区域3经试验端吊篮1内部的液管管道和密闭储液罐5连通,
密闭储液罐5经气管管道连接液环装置8,经液环装置8连接到比例调节阀9的一端,比例调节阀9另一端连接真空调节系统10,即液环装置8经比例调节阀9和真空调节系统10连接,真空调节系统10中安装压力表4。
63.精密电子秤6用于检测超重力情况下密闭储液罐5施加到精密电子秤6上的压力,压力表4用于检测超重力情况下真空调节系统10内的真空度。
64.气管管道从试验端吊篮1伸出经超重力离心机的转臂、转轴后连接到液环装置8。
65.待排液体区域3采用容器放置在离心模型2内,,容器固定于离心模型2内的模型土体中,且容器内盛放液体。待排液体区域3上端开设端口作为出液口,端口经液管管道和密闭储液罐5连通,液管管道连接在离心模型2内的待排液体区域3的出液口和密闭储液罐5的通液口。密闭储液罐5的通气口通过气管管道连接到液环装置8的一个端口,再借由液环装置8的另一个端口通过另一段管路连接到常重力环境下的真空调节系统。
66.真空调节系统10内具有真空泵,通过真空泵进行抽真空操作。真空调节系统10工作时,经比例调节阀9调节开度,将密闭储液罐5中的气体抽取到真空调节系统10中,由于密闭储液罐5中的气体被抽取,气压变小,进而驱动待排液体区域3中的液体经液管管道抽取到密闭储液罐5中,实现液体排放的基本功能。
67.本发明实施过程具体包括如下步骤:
68.s1、建立设置密闭储液罐5的液体质量控制参数z1和真空度需求控制参数z2;具体为:
69.液体质量控制参数z1表达为如下的关系式:
70.z1=δm/δt
71.其中,z1表示密闭储液罐5的液体质量控制参数,δm为预定时间间隔δt内的需要控制的密闭储液罐5内液体质量的变化量,δm/δt为液体排放控制速率;
72.真空度控制参数z2表达为如下的关系式:
73.z2=δp
74.其中,z2表示密闭储液罐5的真空度控制参数,δp为常重力环境下真空调节系统10的真空压差。
75.s2、在超重力离心机工作前,通过实时调节常重力环境的真空调节系统10使得满足s1的密闭储液罐5的液体质量控制参数z1和真空度需求控制参数z2;
76.s2.1、根据预先设置的液体质量控制参数z1和液体质量上下限误差δz1,建立液体质量控制范围z1‑
δz1~z1+δz1;
77.s2.2、由真空调节系统10按照预先设定的抽气流量进行抽真空工作,同时控制比例调节阀9的开度,预先调节密闭储液罐5内的真空差;
78.就是利用手动调节预先调节到一个经验值,然后进入系统自动调节环节,因为我们最终是需要实现实时闭环反馈自动调节的,所以事先手动调节达到一个比较接近的经验值,这样自动调节环节便可以在较短时间内达到动态平衡。
79.s2.3、通过密闭储液罐5底部精密电子秤6实时检测密闭储液罐5内的液体质量变化量δm*,根据液体质量实时变化量δm*计算密闭储液罐5内液体的排液速率δm*/δt;
80.s2.4、根据实时获得的排液速率δm*/δt与设定的液体质量控制参数z1的对比反馈,实时综合调节真空调节系统10的抽气流量和比例调节阀9的开度,使得排液速率δm*/
δt在液体质量控制范围z1‑
δz1~z1+δz1内。
81.具体地,可以将排液速率δm*/δt与设定的液体质量控制参数z1之间的差值输入到pid控制器中进行反馈闭环调节。
82.若差值为正,则真空调节系统10的抽气流量降低与/或者比例调节阀9的开度降低。若差值为负,则真空调节系统10的抽气流量增大与/或者比例调节阀9的开度增大。
83.s3、在超重力离心机工作情况下,根据真空调节系统10的真空度改变量实时监测超重力环境下离心模型2的状态变化,根据s1的密闭储液罐5的液体质量控制参数z1和真空度需求控制参数z2判别并校核试验,直到满足。
84.具体实施中,根据实时监测的离心模型2的状态变化情况提出液体质量控制参数z1和真空度需求控制参数z2,重复进行整个流程,直到所有的试验需求得到满足,则结束离心模型实验。
85.s3.1、根据预先设置的真空度控制参数z2和真空度控制上下限误差δz2,建立真空度控制范围z2‑
δz2~z2+δz2;
86.s3.2、由真空调节系统10按照预先设定的抽气流量进行抽真空工作,同时控制比例调节阀9的开度,预先调节密闭储液罐5内的真空差;
87.利用手动调节预先调节到一个经验值,然后进入系统自动调节环节,这样事先手动调节达到一个比较接近的经验值,这样自动调节环节便可以在较短时间内达到动态平衡,能够更好地实现实时闭环反馈自动调节的。
88.s3.3、通过密闭储液罐5顶部的压力表4实时反馈真空调节系统10的真空压力,获得单位时间的真空压力波动变化值δp*/δt,;
89.s3.4、根据实时获得的真空压力波动变化值δp*/δt与设定的真空度控制参数z2对比反馈,实时综合调节真空调节系统10的抽气流量和比例调节阀9的开度,使得真空压力波动变化值δp*/δt在真空度控制范围z2‑
δz2~z2+δz2内。
90.具体地,可以将真空压力波动变化值δp*/δt与设定的真空度控制参数z2之间的差值输入到pid控制器中进行反馈闭环调节。
91.若差值为正,则真空调节系统10的抽气流量降低与/或者比例调节阀9的开度降低。若差值为负,则真空调节系统10的抽气流量增大与/或者比例调节阀9的开度增大。
92.上述综合真空调节系统10的抽气流量和比例调节阀9的开度的处理进行调节,是通过真空调节系统10粗调,通过比例调节阀9细调。
93.本发明方法具体实施以某一超重力离心模型基坑开挖模拟试验为例,模型实验设计如图3所示,具体实施过程说明如下:
94.首先,根据试验方案在超重力舱的离心机试验端吊篮内布置待试验的模型箱,如图3所示。
95.离心模型包括了模型箱,模型箱内放置模型土体,模型土体内通过模型锚杆固定容器,容器内装有待排出液体,作为模型基坑,容器的侧壁安装传感器,
96.容器侧壁安装土压力传感器和孔隙水压力传感器,利用此类传感器来测量基坑排液过程中,土体对基坑的作用力变化情况。
97.然后,遵照如图4所示的液体排放控制试验流程开始进行试验,根据离心模型试验需求提出模型液体排放控制参数y,如这个基坑开挖模拟试验提出液体排放控制参数y1,待
排放液体区域总水位h。
98.根据实验设计,模拟三个开挖阶段,预先设定每个开挖阶段在给定时间间隔内控制的水位下降速率参数以及对应的误差控制上下限,对应得到三个开挖阶段的液体质量控制参数z1和真空度需求控制参数z2,及配套的上下限误差。
99.接着,从第一个开挖阶段开始,通过实时调节常重力环境的真空调节系统,使得波动变化的水位下降速率或者监测的密闭储液罐的液体质量变化率始终处于受控范围内,于此同时实时监测超重力环境下模型的物理力学状态变化,以判断预先设定的模型液体排放控制参数是否合适,当第一个开挖阶段完成,停止排放液体一段时间,决定是否对参数或误差上下限做出实时的变更。
100.然后进行第二阶段的开挖实验,重新实时调节真空调节系统,使得波动变化的速率始终处于新的基准值及其对应的上下限范围内,当第二个开挖阶段完成,停止排放液体一段时间,决定是否对受控参数或误差上下限做出实时的变更。
101.然后进行第三阶段的开挖实验,重新实时调节真空调节系统,使得波动变化的参数始终处于新的基准值及其对应的上下限范围内。
102.最后,当第三个开挖阶段完成,完成了既定的试验方案,此时可以判定试验需求是否得到满足,如果需要可以实时变更控制参数进行后续试验,如试验的需求得到满足,则结束整个离心实验。
103.最终呈现的试验结果如图5所示,不同试验阶段有不同的模型液体排放控制参数,也就有不同的密闭储液罐液体质量控制参数,通过真空调节系统,使得波动的受控参数始终位于给定精度的上下限范围内,实时变更,实时监测,实时反馈,高精度控制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1