一种农业机械及其清选筛堵塞疏通方法与流程
1.本发明涉及农业机械领域,具体涉及一种农业机械及其清选筛堵塞疏通方法。
背景技术:
2.花生作为重要的油料作物和优质蛋白质资源,在我国的种植面积和产量都位于世界前列。根据联合国粮农组织(fao)统计数据,2019年中国花生种植面积4.51
×
106hm2,占世界15.21%;产量1.76
×
107t,占世界36.04%。
3.我国花生种植分布宽广,主要集中在河南、山东、广东、河北、辽宁、安徽、江苏等地区,种植的花生品种多达300多种,种植模式多样。但中国花生收获机械化水平较美国、巴西、阿根廷等国家相对滞后,2017年中国花生机械化收获水平仅为39.72%,严重制约了花生产业的发展。大部分地区仍以人工和半机械化生产为主,尤其是在收获作业环节,用工量约占生产全过程的1/3,作业成本约占总生产成本的50%。
4.机械化作为提高农业生产效率、降低用工成本的主要途径,为农业生产发展提供了有力保障。花生机械化收获主要有两种作业形式,即联合收获作业和两段收获作业。联合收获为半喂入形式,摘果作业主要采用夹持对辊刷拖的形式,荚果中含秧杂较少,且收获时花生荚果为鲜果,荚果和果秧的比重大,易于将秧杂从荚果中分离出去;两段收获是应用挖掘机将花生挖掘后铺在田间晾晒至半干,然后应用捡拾收获机进行收获作业。捡拾收获机为全喂入形式,经过摘果作业后,落到清选筛上的物料包含花生荚果、断枝断秧(长短杂)、碎叶、泥土等,如不及时将各种物料分离开来,极易造成筛面拥堵,导致荚果含杂率增大,影响清选效果;筛面堵塞后,需要停机进行人工清理,影响机器作业顺畅性和作业效率。清选筛作业环节恶劣,灰尘太大,能见度极低,导致视觉传感器无法应用;若采用风速传感器,由于灰尘太大及风速传感器本身的工作原理和机构限制,风速传感器极易堵塞,导致风速传感器也无法应用于此。
5.此外,现有技术中检测到清选筛堵塞后通常需要停机,并采用人工的方式进行清理,该过程需要拆卸设备外壳,为了保证安全还需要将设备整体停机。这种清理方式耗时过长,会严重影响收割进度,降低了设备的利用率。
技术实现要素:
6.本发明的目的是根据上述现有技术的不足之处,提供一种农业机械及其清选筛堵塞疏通方法,其通过采用可靠的清选筛防堵监测装置检测清选筛是否堵塞,并在堵塞时采用自动的方式对清选筛进行清理,解决了现有技术中存在的问题。
7.本发明目的实现由以下技术方案完成:
8.一种农业机械用清选筛堵塞疏通方法,其包括:
9.通过清选筛防堵监测装置监测自下向上穿过清选筛的清选气流在所述清选筛上方和下方形成的风压差;
10.当所述清选筛堵塞,使得清选筛上下的风压差大于风压差阈值时,通过双阈值死
区智能pi控制方法对驱动机构进行控制,提高所述清选筛的震动频率和清选气流的强度以疏通所述清选筛。
11.本发明的进一步改进在于,所述清选气流由设置在所述清选筛下方的风机提供,所述风机由液压马达驱动;疏通清选筛的过程中,通过调节相应的液压电磁阀对所述液压马达以及所述风机的转速进行控制,从而提高清选气流的强度。
12.本发明的进一步改进在于,所述清选筛在液压马达的驱动下进行振动;疏通清选筛的过程中,通过调节相应的液压电磁阀对液压马达的转速进行控制,从而提高所述清选筛的振动频率。
13.本发明的进一步改进在于,通过多组清选筛防堵监测装置分别检测清选筛各处的风压差,并以各清选筛防堵监测装置检测结果的平均值作为清选筛上下的风压差。
14.本发明的进一步改进在于,清选筛防堵监测装置包括配置在清选筛侧边的压差测试器,压差测试器的内壁呈圆筒状,且轴线沿竖直方向设置;一个转轴沿着压差测试器的圆筒状内壁的直径方向插入所述压差测试器,并与圆片状的风舌固定连接;风舌的形状与所述圆筒状内壁的截面形状相适配;在压差测试器位于风舌的上下方分别引出通向清选筛的上下方的上取风管和下取风管,两取风管的末端分别朝向清选气流来风方向;所述转轴连接有角度传感器。
15.本发明的进一步改进在于,所述压差测试器固定设置在所述清选筛的侧方,并与清选筛的侧边具有间距。
16.本发明的进一步改进在于,所述角度传感器中设置有弹性驱动机构,以驱动所述风舌回到初始角度。
17.本发明的进一步改进在于,判断所述清选筛是否堵塞的风压差阈值采用所述风舌的偏转角度进行表示,当风舌的偏转角度的绝对值大于角度阈值a时,表明所述清选筛堵塞。
18.本发明还包括一种农业机械,其包括下方设置有风机的清选筛,该所述农业机械采用上述的农业机械用清选筛堵塞疏通方法对清选筛进行清理。
19.本发明的优点是:该方法可自动检测清选筛是否堵塞,并在堵塞时采用先进控制方法自动对清选筛进行疏通清理,解决了现有技术中需要停机对堵塞的清选筛进行清选的问题,提高了农业机械的可靠性以及利用率。该方法采用的监测装置采用管路引导风压,并采用机械的风舌对风压差进行检测,具有较好的容尘性,灰尘枝叶难以在其内部钩挂沉积,使得该监测装置可以在恶劣的环境下可靠工作。
附图说明
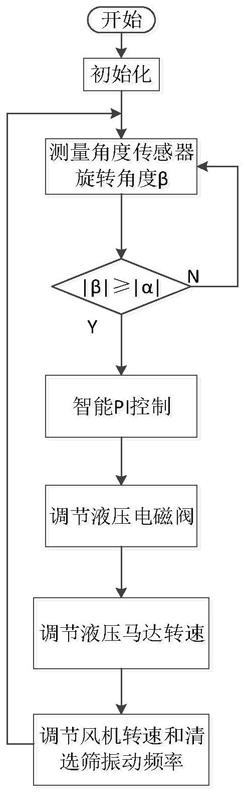
20.图1为农业机械用清选筛堵塞疏通方法的流程图;
21.图2为农业机械用清选筛堵塞疏通方法所应用的清选装置的侧视图;
22.图3为农业机械用清选筛堵塞疏通方法所应用的清选装置的立体视图;
23.图4为清选筛堵塞监测装置的局部立体视图。
具体实施方式
24.以下结合附图通过实施例对本发明的特征及其它相关特征作进一步详细说明,以
便于同行业技术人员的理解:
25.实施例:如图1、2所示,本发明的实施例包括一种农业机械用清选筛堵塞疏通方法,该方法应用于下方设置有风机11的清选筛12。清选筛12沿横向设置,其与水平面存在一个较小的角度。风机11用于向清选筛12的底面吹风以形成穿过清选筛12的清选气流。清选过程中,花生荚果连同断枝断秧(长短杂)、碎叶、泥土等落到清选筛12上,清选气流可使得花生荚果之外的杂质吹起,此过程中环节恶劣,灰尘大,能见度低,导致图像、风速等监测技术无法应用。
26.如图1至4所示,为了解决该问题,本实施例中通过清选筛防堵监测装置20监测自下向上穿过清选筛12的清选气流在清选筛12上方和下方形成的风压差,从而判断清选筛是否堵塞。
27.具体的,如图3、4所示,清选筛防堵监测装置20包括设置在清选筛12的侧方且内部呈圆筒状的压差测试器30。圆筒状的内壁围合形成圆柱形的气流通道。转轴33沿着圆筒状内壁的直径方向插入压差测试器30内部,转轴33上固定设置有与圆筒状内壁的截面形状相适配的圆片状风舌31。风舌31位于气流通道中。
28.在压差测试器30位于风舌31的上下方分别引出通向清选筛12上下方的上取风管21和下取风管22,两取风管均与气流通道连通,且二者的末端分别朝向清选气流来风方向。两个取风管分别将清选筛12上方和下方的风压引至压差测试器30的气流通道内部,当清选筛12上下存在风压差时会在压差测试器30的气流通道中形成气流,推动风舌31沿着转轴33偏转。
29.转轴33向外延伸连接角度传感器32,以检测风舌31的偏转角度。风舌31的偏转角度与被检测的风压差正相关,因此通过角度可以检测风压差。当清选筛12堵塞时,清选气流受到阻挡,使得清选筛12上下的风压差变大,通过检测风压差可以检测清选筛12是否堵塞。
30.在一些实施例中,自末端至压差测试器30,下取风管22的高度单调递增,不存在下降段。这种结构可使得来自上取风管21或者下取风管22末端的杂物不受阻碍的排出,避免杂物在下取风管22中沉积。
31.在一些实施例中,上取风管21和下取风管22的末端朝向以及内径均相同,且二者的末端切线均沿清选气流的风向设置,这样可以充分引入风压,提高检测精度。此外,上取风管21和下取风管22经过若干次弯折,且末端开口均朝向斜下方设置,以减少吹入管道内部的杂物。
32.在一些实施例中,上取风管21经若干处弯折后其末端延伸至清选筛12上方,下取风管22经若干处弯折后其末端延伸至清选筛12下方,上取风管21以及下取风管22的弯折处为均为曲率半径相同的圆弧形,以减少取风管弯折处对风压造成的损失。
33.在一些实施例中,压差测试器30的壳体包括呈管状且同轴连接的上壳体37和下壳体39,二者通过法兰结构连接,且二者的法兰盘34之间设置有密封件并通过螺栓紧密封。密封件可采用纸垫或橡胶垫,以防止气流外泄。
34.在一个具体实施例中,上壳体37以及下壳体39的法兰盘34之间设置有供转轴33穿过的圆孔,该圆孔沿着法兰盘34的直径方向设置。上壳体37以及下壳体39的轴线沿竖直方向设置。
35.在该实施例中,转轴33经过风舌31的直径方向,且风舌31为圆形结构,沿着转轴33
对称分布,避免风舌31一侧偏重带来的测量误差。
36.在该实施例中,角度传感器32中设置有用于驱动风舌31沿转轴33转动复位的弹性驱动机构。当风压差为0时,没有气流推动风舌31,此时弹性驱动机构驱动风舌31处于初始角度(水平状态),完全遮断压差测试器30的内部的圆柱形气流通道。当风压差增大时,圆柱形气流通道中形成气流,推动风舌31克服弹性驱动机构相对于初始角度偏转相应角度,风舌31偏转角度的绝对值与风压差正相关。弹性驱动机构可采用弹簧实现,也可采用其他具有弹性的机构或者采用电磁驱动的机构例如永磁电机模拟弹力特性。
37.该实施例中,压差测试器30可设置在清选筛12的侧方,二者之间可保持一定的间距,并设置隔板。角度传感器32设置在压差测试器30的外侧,与作业环境分离,增强了电子器件的可靠性。采用机械结的风舌31检测风压,容尘性好,可以在恶劣的环境下可靠工作。
38.该实施例中,角度传感器32与一个固定板35的外侧面连接,固定板35的内侧面与法兰盘的边缘贴合,并通过两个u形固定卡36分别与上取风管21与下取风管22固定连接。
39.本实施例中,通过多组清选筛防堵监测装置20分别检测清选筛12各处的风压差。各组清选筛防堵监测装置20的上取风管21和下取风管22末端可均匀分布,也可集中分布在容易堵塞的区域以便重点监控。
40.采用多组清选筛防堵监测装置20时,可将各组清选筛防堵监测装置20检测的风压差取平均值作为清选筛12上下的风压差;也可采用更加复杂的信号处理方式,例如将各清选筛防堵监测装置20检测到的风压差检测值从大到小排列,并将最大的n个(清选筛防堵监测装置20的总数大于等于2*n,且n大于1)检测值的平均值作为清选筛12上下的风压差,这种方式可以检测到局部的堵塞,解决了现有技术中采用过滤物流量的监测方式检测方式难以检测到清选筛局部堵塞的问题。
41.如图1、2所示,由于清选筛持续震动以及物料分布的动态变化,使得各清选筛防堵监测装置20监测的风压差是波动的。为了减小波动的影响,可采用均值滤波的方式对各角度传感器的检测结果进行滤波。
42.当所述清选筛堵塞,使得清选筛上下的风压差大于风压差阈值时,通过双阈值死区智能pi控制方法对驱动机构进行控制,提高清选筛12的震动频率和清选气流的强度,以疏通清选筛12。本实施例中,驱动机构为液压马达。
43.双阈值死区智能pi控制方法包括双阈值判别阶段以及智能pi控制阶段。
44.在一个具体实施例中,判断清选筛是否堵塞的风压差阈值采用风舌的偏转角度进行表示,当风舌的偏转角度的绝对值大于角度阈值a时,表明清选筛堵塞。采用阈值的原因在于:清选筛正常作业时,筛面上有物料,降低了一部分风压,再加上风束经过上、下取风管到达风舌时,有一定的风压损失,所以角度传感器在清选筛面没堵塞之前已经有一定的逆时针或顺时针旋转角度α,即有一个正阈值α和负阈值
‑
α,只有当角度传感器测得的角度变化β超出正阈值和负阈值之间的区间时,才说明清选筛面堵塞,此为双阈值死区智能pi控制方法的双阈值判别阶段。双阈值判别阶段可以避免控制器频繁调节液压马达导致的系统稳定性差的问题。
45.在一个具体实施例中,清选气流由设置在清选筛12下方的风机11提供,风机11由液压马达驱动;疏通清选筛的过程中,通过调节相应的液压电磁阀对液压马达以及风机的转速进行控制,从而提高清选气流的强度。
46.在一个具体实施例中,清选筛12在液压马达的驱动下进行振动;疏通清选筛的过程中,通过调节相应的液压电磁阀对液压马达的转速进行控制,从而提高清选筛12的振动频率。
47.通过双阈值判别阶段检测到风压差过大时,双阈值死区智能pi控制方法进入智能pi控制阶段。在此阶段中,采用智能pi控制算法对液压马达进行控制。智能pi控制算法为现有技术,具备了传统pi调节器具有结构简单、稳态无静差等优点,还可解决传统pi调节器以不变的模式和参数来处理变化多端的动态过程很难解决平稳性、快速性和准确性之间的矛盾。智能pi控制是一种新型的控制方法,智能pi控制器能根据系统的运行状况动态改变控制器的结构与参数,具有较强的自适应能力,使控制器在复杂、动态和不确定的系统中也能取得较好的控制效果。
48.如图2所示,本发明的实施例还包括一种农业机械,其包括下方设置有风机的清选筛,该农业机械采用上述的农业机械用清选筛堵塞疏通方法对清选筛进行清理。
49.以上的本发明实施方式,并不构成对本发明保护范围的限定。任何在本发明的精神和原则之内所作的修改、同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1