一种物流分拣机器人
1.本发明涉及物流分拣领域,具体的说是一种物流分拣机器人。
背景技术:
2.物流是物品从供应地向接收地的实体流动过程中,根据实际需要,将运输、储存、装卸搬运、包装、流通加工、配送、信息处理等功能有机结合起来实现用户要求的过程,物流是一个控制原材料、制成品、产成品和信息的系统,从供应开始经各种中间环节的转让及拥有而到达最终消费者手中的实物运动,以此实现组织的明确目标,由于物流物品的重量差异,需要在运输之前根据其重量对物品进行分拣。
3.在对物流物品进行分拣的过程中,由于物品的重量不同,而重量划分标准为一个范围值,因此在通过人工对物品进行分拣的过程中,由于物品的重量差别较大,因此工人难以快速对物品进行分拣,从而导致物品分拣的效率较低,且工人难以保证其准确度,导致在实际操作过程中,存在以下问题:
4.(1)通过人工对物品进行分拣时,由于人工需要根据物品重量对照重量标准进行分拣,从而导致工人的效率较低,且分拣后的物品需要人工对其进行收集,从而进一步导致设备的加工效率较低。
5.(2)工人在对物品进行分拣时,当物品的重量与重量标准极值相近时,工人难以快速对其进行准确划分,从而导致工人的分拣效果较差。
技术实现要素:
6.为了弥补现有技术的不足,本发明提供了一种物流分拣机器人。
7.本发明所要解决其技术问题所采用以下技术方案来实现:一种物流分拣机器人,包括分拣装置与带式输送机,所述分拣装置左端面固定安装有支撑台,支撑台上侧固定安装有带式输送机;其中:
8.所述分拣装置包括圆形筒、导板、定位弹簧、旋转架、倾斜板、出料板一、出料板二与出料板三,圆形筒上端固定安装有倾斜的导板,圆形筒底部上端面固定安装有定位弹簧,定位弹簧上端面固定安装有旋转架,旋转架上端面固定安装有倾斜板,倾斜板外端面与圆形筒之间以滑动配合的方式相连接,圆形筒右端面从上至下分别固定安装有出料板一、出料板二与出料板三,出料板一、出料板二与出料板三的末端处于同一水平高度,圆形筒上位于出料板一、出料板二与出料板三上方均开设有出料口;通过圆形筒对倾斜板的运动轨迹进行限制,通过导板将带式输送机上的物品运输至圆形筒中部上端,根据物品的重量对定位弹簧进行施力,使定位弹簧收缩,从而带动旋转架与倾斜板向下运动,根据物品的重量范围对倾斜板在圆形筒内运动的位移进行限定,通过旋转架控制倾斜板的倾斜方向,从而使物品顺利通过出料板一、出料板二或出料板三排出圆形筒。
9.继续参阅图,所述带式输送机外端面沿周向均匀固定安装有限位板,限位板左右两端面均固定安装有橡胶板;通过限位板对物品进行限位,通过橡胶板防止物品受到限位
板的刮擦。
10.所述圆形筒包括筒体、滑动轨道、转动轨道、圆柱弹簧、限位块、电磁板、润滑珠与滚动柱,筒体内端面前后两侧均固定安装有滑动轨道,筒体内端面固定安装有多个转动轨道,多个转动轨道从上往下呈均匀线性分布,滑动轨道中部开设有t形长凹槽,t形长凹槽内位于转动轨道上下两侧均固定安装有圆柱弹簧,圆柱弹簧末端固定安装有限位块,下侧的限位块上端面固定安装有电磁板,下侧的限位块其余端面以滚动配合的方式连接有多个润滑珠,多个润滑珠均匀布置,上侧的限位块与圆柱弹簧连接端面固定安装有电磁板,滑动轨道上靠近上侧的电磁板处具有磁吸性,上侧的限位块其余端面均以滚动配合的方式连接有多个润滑珠,多个润滑珠均匀布置,转动轨道中部开设有环形凹槽一,环形凹槽一内通过销轴转动连接有多个呈周向均匀分布的滚动柱;通过筒体对滑动轨道进行限位,通过滑动轨道对在垂直方向上运动的倾斜板进行限位导向,通过转动轨道对水平方向上转动的倾斜板进行限位导向,由于每个出料口可排出的物品的重量均为范围值,因此当倾斜板受到物品的压力向下运动时,对上侧的电磁板进行通电,使限位块与滑动轨道紧贴,从而防止限位块影响倾斜板的运动,当物品的重量仅能够使倾斜板运动至某一个出料口范围内,此时对下侧的电磁板进行通电,从而使倾斜板在磁力的作用下继续向下运动,直至倾斜板与限位块上的电磁板接触并连接,此时通过位于转动轨道上侧的圆柱弹簧带动限位块对倾斜板上侧进行限位,此时对下侧的电磁板进行断电,同时通过旋转架带动倾斜板转动,从而使倾斜板在转动轨道内运动,直至倾斜板上端面最低处朝向出料口,最终使物品顺利通过出料口排出筒体,而倾斜板在滑动轨道内运动时,通过圆柱弹簧的弹力,使限位块向圆柱弹簧收缩的方向运动,此时通过润滑珠降低限位块与倾斜板之间的摩擦力,当倾斜板在转动轨道内转动时,通过滚动柱降低倾斜板与转动轨道之间的摩擦力,从而降低倾斜板的磨损量,以防止倾斜板与筒体之间产生较大的空隙,从而影响筒体对倾斜板的导向效果,当物品排出筒体后,且倾斜板在旋转架的带动下运动至滑动轨道时,对上侧的电磁板进行通电,从而使限位块向圆柱弹簧侧运动,电磁板在磁力的作用下与滑动轨道连接,倾斜板不再受到上侧的限位块的限制,从而在定位弹簧的反作用力下恢复至原状态。
11.作为本发明的一种优选技术方案,所述导板包括c形板、导向柱与橡胶套,圆形筒上端固定安装有倾斜的c形板,c形板上端面内通过转动轴转动连接有多个呈均匀线性分布的导向柱,导向柱外端面均匀开设有弧形凹槽,导向柱外端面固定安装有橡胶套;当物品在c形板上运动时,通过外端面均匀开设有弧形凹槽的导向柱对物品进行导向看,以防止物品在c形板上运动时发生歪斜,通过橡胶套防止导向柱上的弧形凹槽对物品外端面进行刮擦。
12.作为本发明的一种优选技术方案,所述旋转架包括固定圆盘、电机一、锥形齿轮、转动圆柱与转动圆板,定位弹簧上端面固定安装有固定圆盘,固定圆盘上端面右侧通过电机座固定安装有电机一,电机一输出轴通过联轴器固定安装有锥形齿轮,固定圆盘中部转动连接有转动圆柱,转动圆柱上固定安装有转动圆板,转动圆板下侧开设有环形凹槽二,环形凹槽二内端面沿周向均匀开设有锥形齿槽,锥形齿槽与锥形齿轮相啮合,转动圆板上端面固定安装有倾斜板;通过固定圆盘对电机一进行固定,通过电机一带动锥形齿轮转动,从而通过锥形齿轮与转动圆板上的齿槽相配合,以达到带动转动圆板与倾斜板转动的目的。
13.作为本发明的一种优选技术方案,所述倾斜板包括运动圆板、倾斜圆板、t形块、润滑柱与圆球,转动圆板上端面固定安装有运动圆板,运动圆板上端面固定安装有倾斜圆板,
运动圆板外端面沿周向均匀固定安装有t形块,t形块与滑动轨道之间以及t形块与转动轨道之间均以滑动配合的方式相连接,t形块与转动轨道相接触端面沿周向均匀通过销轴转动连接有润滑柱,润滑柱外端面沿周向均匀设置有圆球,倾斜圆板上端面右侧高度大于左侧高度;当物品运输至倾斜圆板上端面时,由于倾斜圆板上端面倾斜,从而使物品顺利运动至倾斜圆板最低处,同时物品的重力挤压定位弹簧,从而使倾斜圆板向下运动时,t形块在滑动轨道内向下运动,当t形块在下侧的电磁板的磁力的作用下,继续向下运动,并与限位块上的电磁板连接时,对上侧的电磁板进行断电处理,此时通过位于转动轨道上侧的圆柱弹簧带动限位块对倾斜板上侧进行限位,对下侧的电磁板进行断电,同时通过旋转架带动倾斜板转动,从而使倾斜板在转动轨道内运动,直至倾斜板上端面最低处朝向出料口,最终使物品顺利通过出料口排出筒体,通过t形块与滑动轨道之间以及t形块与转动轨道之间相配合,对运动圆板进行导向,通过润滑柱对圆球进行定位,通过圆球与润滑柱相配合,从而降低t形块与滑动轨道之间以及t形块与转动轨道之间的摩擦力,防止因t形块磨损较严重,从而导致运动圆板在运动过程中受力不平衡的现象,通过上端面右侧高度大于左侧高度的倾斜圆板,防止在倾斜圆板向下运动的过程中,物品从任意的出料口排出筒体。
14.作为本发明的一种优选技术方案,所述出料板一为开口向上且呈倾斜设置的匚形板,出料板一上端面光滑,出料板一的前后两侧内壁均固定安装有多个呈均匀线性分布的,前后两侧的挤压弹簧呈对称布置,挤压弹簧末端固定安装有挤压块,前后两侧的挤压块相对端面光滑,挤压块左侧均开设有圆角;通过开口向上且呈倾斜设置的匚形板对物品进行导向,通过上端面光滑的出料板一便于物品向出料板一末端运动,通过利用挤压弹簧的弹力,使物品受到前后两侧对称的挤压力,从而保证物品在运动过程中不会产生较大的歪斜,通过相对端面光滑且在左侧开设有圆角的挤压块便于物品的运动。
15.作为本发明的一种优选技术方案,所述出料板二的结构与出料板一的结构相同,区别仅在于出料板二上的挤压块相对侧安装有表面粗糙的橡胶块,出料板三的结构与出料板二的结构相同,区别仅在于出料板三上的橡胶块表面粗糙度大于出料板二上的橡胶块表面粗糙度;由于倾斜板根据物品的重量向下运动,因此最下侧的出料板三排出的物品的重量大于出料板二排出的物品的重量,出料板二排出的物品的重量大于出料板一排出的物品的重量,因此出料板三上的物品运动的速度大于出料板二上的物品运动的速度,出料板二上的物品运动的速度大于出料板一上的物品运动的速度,利用表面粗糙的橡胶块对物品进行缓冲,降低其运动的速度,防止物品在收集时受到较大的撞击力。
16.与现有技术相比,本发明具有以下优点:
17.1.本发明提供的一种物流分拣机器人,通过带式输送机对物品进行运输,通过分拣装置对物品进行分拣,整个分拣过程中,无需工人参与,从而提高设备分拣物品的效率,且分拣装置可迅速根据物体重量,区分物品所属的重量标准,从而将其快速进行分拣收集,以达到提高设备的分拣效果的目的。
18.2.本发明设置的分拣装置,通过c形板对导向柱进行定位,通过外端面均匀开设有弧形凹槽的导向柱使物品在c形板上运动时不发生歪斜,通过橡胶套防止导向柱上的弧形凹槽对物品外端面进行刮擦。
19.3.本发明设置的分拣装置,通过倾斜圆板对物品进行导向,使其顺利运动至倾斜圆板最低处,通过t形块与滑动轨道之间以及t形块与转动轨道之间相配合,对运动圆板进
行导向,通过润滑柱对圆球进行定位,通过圆球与润滑柱相配合,从而降低t形块与滑动轨道之间以及t形块与转动轨道之间的摩擦力,防止因t形块磨损较严重,从而导致运动圆板在运动过程中受力不平衡的现象,通过上端面右侧高度大于左侧高度的倾斜圆板,防止在倾斜圆板向下运动的过程中,物品从任意的出料口排出筒体。
20.4.本发明设置的分拣装置,通过倾斜的横截面为c形的长板对物品进行导向,通过上端面光滑的出料板便于物品向出料板一末端运动,通过利用挤压弹簧的弹力,使物品受到前后两侧对称的挤压力,从而保证物品在运动过程中不会产生较大的歪斜,通过相对端面光滑且在左侧开设有圆角的挤压块便于物品的运动。
附图说明
21.下面结合附图和实施例对本发明进一步说明。
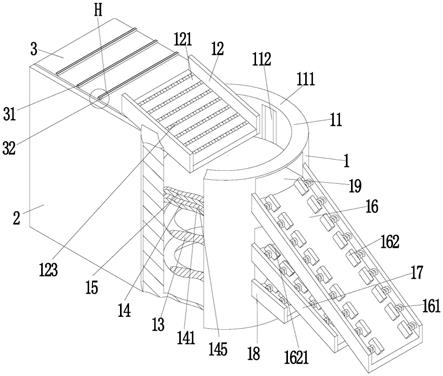
22.图1是本发明的立体结构示意图;
23.图2是本发明的主剖视图;
24.图3是本发明的图2中a
‑
a向的剖视图;
25.图4是本发明的图2的t形块位于滑动轨道时的b
‑
b向的断面图(去除定位弹簧、支撑台与出料板二);
26.图5是本发明的图2中n处的局部放大图;
27.图6是本发明的图3中m处的局部放大图;
28.图7是本发明的导向柱的立体结构示意图;
29.图8是本发明的锥形齿轮与转动圆板的平面结构示意图;
30.图9是本发明的图1的h处的局部放大图。
31.图中:1、分拣装置;11、圆形筒;111、筒体;112、滑动轨道;113、转动轨道;114、圆柱弹簧;115、限位块;116、电磁板;117、润滑珠;118、滚动柱;12、导板;121、c形板;122、导向柱;123、橡胶套;13、定位弹簧;14、旋转架;141、固定圆盘;142、电机一;143、锥形齿轮;144、转动圆柱;145、转动圆板;15、倾斜板;151、运动圆板;152、倾斜圆板;153、t形块;154、润滑柱;155、圆球;16、出料板一;161、挤压弹簧;162、挤压块;1621、橡胶块;17、出料板二;18、出料板三;19、出料口;2、支撑台;3、带式输送机;31、限位板;32、橡胶板。
具体实施方式
32.为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合图1至图9,对本发明进行进一步阐述。
33.一种物流分拣机器人,包括分拣装置1与带式输送机3,所述分拣装置1左端面固定安装有支撑台2,支撑台2上侧固定安装有带式输送机3;
34.参阅图1,所述分拣装置1包括圆形筒11、导板12、定位弹簧13、旋转架14、倾斜板15、出料板一16、出料板二17与出料板三18,圆形筒11上端固定安装有倾斜的导板12,圆形筒11底部上端面固定安装有定位弹簧13,定位弹簧13上端面固定安装有旋转架14,旋转架14上端面固定安装有倾斜板15,倾斜板15外端面与圆形筒11之间以滑动配合的方式相连接,圆形筒11右端面从上至下分别固定安装有出料板一16、出料板二17与出料板三18,出料板一16、出料板二17与出料板三18的末端处于同一水平高度,圆形筒11上位于出料板一16、
出料板二17与出料板三18上方均开设有出料口19;通过圆形筒11对倾斜板15的运动轨迹进行限制,通过导板12将带式输送机3上的物品运输至圆形筒11中部上端,根据物品的重量对定位弹簧13进行施力,使定位弹簧13收缩,从而带动旋转架14与倾斜板15向下运动,根据物品的重量范围对倾斜板15在圆形筒11内运动的位移进行限定,通过旋转架14控制倾斜板15的倾斜方向,从而使物品顺利通过出料板一16、出料板二17或出料板三18排出圆形筒11。
35.继续参阅图1与图9,所述带式输送机3外端面沿周向均匀固定安装有限位板31,限位板31左右两端面均固定安装有橡胶板32;通过限位板31对物品进行限位,通过橡胶板32防止物品受到限位板31的刮擦。
36.参阅图2、图4与图6,所述圆形筒11包括筒体111、滑动轨道112、转动轨道113、圆柱弹簧114、限位块115、电磁板116、润滑珠117与滚动柱118,筒体111内端面前后两侧均固定安装有滑动轨道112,筒体111内端面固定安装有多个转动轨道113,多个转动轨道113从上往下呈均匀线性分布,滑动轨道112中部开设有t形长凹槽,t形长凹槽内位于转动轨道113上下两侧均固定安装有圆柱弹簧114,圆柱弹簧114末端固定安装有限位块115,下侧的限位块115上端面固定安装有电磁板116,下侧的限位块115其余端面以滚动配合的方式连接有多个润滑珠117,多个润滑珠117均匀布置,上侧的限位块115与圆柱弹簧114连接的端面固定安装有电磁板116,滑动轨道112上靠近上侧的电磁板116处具有磁吸性,上侧的限位块115其余端面均以滚动配合的方式连接有多个润滑珠117,多个润滑珠117均匀布置,转动轨道113中部开设有环形凹槽一,环形凹槽一内通过销轴转动连接有多个呈周向均匀分布的滚动柱118;通过筒体111对滑动轨道112进行限位,通过滑动轨道112对在垂直方向上运动的倾斜板15进行限位导向,通过转动轨道113对水平方向上转动的倾斜板15进行限位导向,由于每个出料口19可排出的物品的重量均为范围值,因此当倾斜板15受到物品的压力向下运动时,对上侧的电磁板116进行通电,使限位块115与滑动轨道112紧贴,从而防止限位块115影响倾斜板15的竖直运动,当物品的重量仅能够使倾斜板15运动至某一个出料口19范围内,此时对下侧的电磁板116进行通电,从而使倾斜板15在磁力的作用下继续向下运动,直至倾斜板15与限位块115上的电磁板116接触并连接,此时通过位于转动轨道113上侧的圆柱弹簧114带动限位块115对倾斜板15上侧进行限位,此时对下侧的电磁板116进行断电,同时通过旋转架14带动倾斜板15转动,从而使倾斜板15在转动轨道113内运动,直至倾斜板15上端面最低处朝向出料口19,最终使物品顺利通过出料口19排出筒体111,而倾斜板15在滑动轨道112内运动时,通过圆柱弹簧114的弹力,使限位块115向圆柱弹簧114收缩的方向运动,此时通过润滑珠117降低限位块115与倾斜板15之间的摩擦力,当倾斜板15在转动轨道113内转动时,通过滚动柱118降低倾斜板15与转动轨道113之间的摩擦力,从而降低倾斜板15的磨损量,以防止倾斜板15与筒体111之间产生较大的空隙,从而影响筒体111对倾斜板15的导向效果,当物品排出筒体111后,且倾斜板15在旋转架14的带动下运动至滑动轨道112时,对上侧的电磁板116进行通电,从而使限位块115向圆柱弹簧114侧运动,电磁板116在磁力的作用下与滑动轨道112连接,倾斜板15不再受到上侧的限位块115的限制,从而在定位弹簧13的反作用力下恢复至原状态。
37.参阅图2与图7,所述导板12包括c形板121、导向柱122与橡胶套123,圆形筒11上端固定安装有倾斜的c形板121,c形板121上端面内通过转动轴转动连接有多个呈均匀线性分布的导向柱122,导向柱122外端面均匀开设有弧形凹槽,导向柱122外端面固定安装有橡胶
套123;当物品在c形板121上运动时,通过外端面均匀开设有弧形凹槽的导向柱122对物品进行导向,以防止物品在c形板121上运动时发生歪斜,通过橡胶套123防止导向柱122上的弧形凹槽对物品外端面进行刮擦。
38.参阅图2与图8,所述旋转架14包括固定圆盘141、电机一142、锥形齿轮143、转动圆柱144与转动圆板145,定位弹簧13上端面固定安装有固定圆盘141,固定圆盘141上端面右侧通过电机座固定安装有电机一142,电机一142输出轴通过联轴器固定安装有锥形齿轮143,固定圆盘141中部转动连接有转动圆柱144,转动圆柱144上固定安装有转动圆板145,转动圆板145下侧开设有环形凹槽二,环形凹槽二内端面沿周向均匀开设有锥形齿槽,锥形齿槽与锥形齿轮143相啮合,转动圆板145上端面固定安装有倾斜板15;通过固定圆盘141对电机一142进行固定,通过电机一142带动锥形齿轮143转动,从而通过锥形齿轮143与转动圆板145上的齿槽相配合,以达到带动转动圆板145与倾斜板15转动的目的。
39.参阅图4与图6,所述倾斜板15包括运动圆板151、倾斜圆板152、t形块153、润滑柱154与圆球155,转动圆板145上端面固定安装有运动圆板151,运动圆板151上端面固定安装有倾斜圆板152,运动圆板151外端面沿周向均匀固定安装有t形块153,t形块153为铁制品,t形块153与滑动轨道112之间以及t形块153与转动轨道113之间均以滑动配合的方式相连接,t形块153与转动轨道113相接触端面沿周向均匀通过销轴转动连接有润滑柱154,润滑柱154外端面沿周向均匀设置有圆球155,倾斜圆板152上端面右侧高度大于左侧高度;当物品运输至倾斜圆板152上端面时,由于倾斜圆板152上端面倾斜,从而使物品顺利运动至倾斜圆板152最低处,同时物品的重力挤压定位弹簧13,从而使倾斜圆板152向下运动时,t形块153在滑动轨道112内向下运动,当t形块153在下侧的电磁板116的磁力的作用下,继续向下运动,并与限位块115上的电磁板116连接时,对上侧的电磁板116进行断电处理,此时通过位于转动轨道113上侧的圆柱弹簧114带动限位块115对倾斜板15上侧进行限位,对下侧的电磁板116进行断电,同时通过旋转架14带动倾斜板15转动,从而使倾斜板15在转动轨道113内运动,直至倾斜板15上端面最低处朝向出料口19,最终使物品顺利通过出料口19排出筒体111,通过t形块153与滑动轨道112之间以及t形块153与转动轨道113之间相配合,对运动圆板151进行导向,通过润滑柱154对圆球155进行定位,通过圆球155与润滑柱154相配合,从而降低t形块153与滑动轨道112之间以及t形块153与转动轨道113之间的摩擦力,防止因t形块153磨损较严重,从而导致运动圆板151在运动过程中受力不平衡的现象,通过上端面右侧高度大于左侧高度的倾斜圆板152,防止在倾斜圆板152向下运动的过程中,物品从任意的出料口19排出筒体111。
40.参阅图1,所述出料板一16为开口向上且呈倾斜设置的匚形板,出料板一16上端面光滑,出料板一16的前后两侧内壁均固定安装有多个呈均匀线性分布的161,前后两侧的挤压弹簧161呈对称布置,挤压弹簧161末端固定安装有挤压块162,前后两侧的挤压块162相对端面光滑,挤压块162左侧均开设有圆角;通过开口向上且呈倾斜设置的匚形板对物品进行导向,通过上端面光滑的出料板一16便于物品向出料板一16末端运动,通过利用挤压弹簧161的弹力,使物品受到前后两侧对称的挤压力,从而保证物品在运动过程中不会产生较大的歪斜,通过相对端面光滑且在左侧开设有圆角的挤压块162便于物品的运动。
41.继续参阅图1,所述出料板二17的结构与出料板一16的结构相同,区别仅在于出料板二17上的挤压块162相对侧安装有表面粗糙的橡胶块1621,出料板三18的结构与出料板
二17的结构相同,区别仅在于出料板三18上的橡胶块1621表面粗糙度大于出料板二17上的橡胶块1621表面粗糙度;由于倾斜板15根据物品的重量向下运动,因此最下侧的出料板三18排出的物品的重量大于出料板二17排出的物品的重量,出料板二17排出的物品的重量大于出料板一16排出的物品的重量,因此出料板三18上的物品运动的速度大于出料板二17上的物品运动的速度,出料板二17上的物品运动的速度大于出料板一16上的物品运动的速度,利用表面粗糙的橡胶块1621对物品进行缓冲,降低其运动的速度,防止物品在收集时受到较大的撞击力。
42.具体工作时,首先将对上侧的电磁板116进行通电,使限位块115与滑动轨道112紧贴,从而防止转动轨道113上侧的限位块115影响倾斜板15的运动,然后通过带式输送机3将物品运输至导板12,通过导板12将物品运输至圆形筒11中部上端,此时根据物品的重量对定位弹簧13进行施力,使定位弹簧13收缩,从而带动旋转架14与倾斜板15向下运动,根据物品的重量范围对倾斜板15在圆形筒11内运动的位移进行限定,由于每个出料口19可排出的物品的重量均为范围值,因此在倾斜板15受到物品的压力向下运动时,当物品的重量仅能够使倾斜板15运动至某一个出料口19范围内,此时对下侧的电磁板116进行通电,从而使倾斜板15在磁力的作用下继续向下运动,直至倾斜板15与限位块115上的电磁板116接触并固定连接,此时对上侧的电磁板116进行断电,使位于转动轨道113上侧的圆柱弹簧114带动限位块115对倾斜板15上侧进行限位,此时对下侧的电磁板116进行断电,同时通过旋转架14带动倾斜板15转动,从而使倾斜板15在转动轨道113内运动,直至倾斜板15左侧上端面的高度大于右侧上端面的高度,最终使物品顺利通过出料口19排出筒体111,当物品排出筒体111后,通过旋转架14带动倾斜板15转动,从而使倾斜板15在旋转架14的带动下运动至滑动轨道112,此时对上侧的电磁板116进行通电,从而使限位块115向圆柱弹簧114侧运动,倾斜板15不再受到上侧的限位块115的限制,从而在定位弹簧13的反作用力下恢复至原状态,重复进行上述动作对物品进行分拣。
43.以上显示和描述了本发明的基本原理、主要特征和优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中的描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1